



Markov Vector Approach-3
Docsity.com







































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An exact solution for linear and nonlinear systems of equations with gaussian and exponential distributions. It includes the determination of the number of times a level is crossed in an interval, the study of limit cycle oscillations, and the integration of terms by parts using taylor's expansion. The document also discusses the general formulation of the problem and the steady state pdf.
Typology: Slides
1 / 49

This page cannot be seen from the preview
Don't miss anything!
Markov Vector Approach-
Docsity.com
2
^
0
,^1
,^
;^ 0;
0
,^ ,
~^1 ,^
~ ~^
(^1) 0;^
2
,^ ;^
1, 2,^
,
2
; ,^
1, 2,^
, 1 2 i^
j^
ij
j^ j
t ij^
ij n
j n j j dX^ t^
f^ t X
t^ dt
G t X
t^ dB t
t^
X^
X
X^ t^
f^ t X
t^
n
G t X
t^
n^ m dB t^
m dB t^
B^ t^
B^ t^
D
f^ t x
j^
n
GDG
x
i j^
m
p^
p t^
x
^
^
^
^
^
^
^
^
^
^
^
^ ^
^
^ ^
^
^
^
^
^
^
^
^
^ ^
^
^ ^
^
Ge n e
r a l :
e n s i o
n a l I t o SD^
E
0
0 1 ;0 |^
;^
BCS m^ m
jk j^ k^
j^ k
n
i^ i i
p x^ x
p x^
x^
x^ x
^
^
^
^
^
^
Docsity.com
4
Further
questions
-^ How
-^ A^ few
selected
examples
for^ which
exact
solutions
are^ possible
-^ Can
Docsity.com
5
^
^
^
^
^
^
Lagrange's method for solving linear PDE-s. Consider the PDE of the form,^
,^
,^ ,^
,^ ,^
1
To obtain an integral of the above equation we considerthe auxiliary equationLe
z^
z
P x y z
Q x y z
R x y z
x^
y
dx^
dy^
dz P^ Q^ ^ R
^
^
^
Recall :
^
^
^
t two independent solutions of this equation be written as,^ ,^ ^
&^
,^ ,^
where
and
are constants.
Then ,
0 is a solution of (1). Alternatively,
( ) is also a solution.
u x y z
a^
v x y z
b^
a^
b
u v
u^ f v
Docsity.com
7
0
0
1
1
1
1
1
1 ;^ 0;
0
;^0
~^
1;^ ~
;^
~^ 1
0;^
2 t
ij^ m m
I II I II II
II^
I
MX^
CX^
KX^
W^ t^
t^
X^
X^ X^
X
X^ t^
N^
n^ m^
W^ t^
m
W^ t^
W^ t W
t^
D
X^ M
CX^
M^ KX
M^
W^ t
Y^
X Y^ Y
X dY^
Y dt dY^
M^ CY
M
KY^
M^
dB t
dY^ t^
PYdt
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^ ^
^ ^
^ ^
^ ^ ^ ^
^
^
Example : Linear MDOF systems^ ^
^
^
^
0
1
1
0;^01
0
0 QdB t t^ ;
Y^
Y
I
P^
Q
M^ K
M^
C^
M
^
^
^
^
^
^
^
^
^
^
^
^
^
^
Docsity.com
8
^
^
^
^
1
1
1
1
2 2
2
2 1
2 1
0
Consider the eigenvalue problemLet^
be the 2
matrix of
I^
I
II^
II^
m
N^ N^
N^ m
N^
N
dY^ t
Y^ t I^
dt^
dB t
dY^
t^
Y^ t
M^ K
dY^ t
PYdt QdB t t
^
^
^
^
1
eigenvectors and
be the 2
diagonal matrix of complete set of
eigenvalues of
Introduce the transformation
Y^ t^
Z t
^
Docsity.com
10
2
2 1
1 1
1 2
2
(^02) 0
1 2
2
1
0
Define the conditional characteristic function
;0 exp ; |^
;0 exp N^
m^ m j^ j^
jk
j^
j^ k j^
j^ k
N
N j^
j^
N
j j j
p^
p
z p t^
z^
z^ z
t^ Z^
z^
t
p z t
z^
i^
z^ dz dz
dz
p z t
z^
i^
z
^ ^
^
^
^ ^
^
^
2 1
2 0
1
N j ;0 exp
N
k^
j^ j j
k
dz
t^
z p z t
z^
i^
z^ dz
Docsity.com
11
^
^
^
^
^
^
^
^
^
(^2) 0
1
2
0
1 2 0
1
2
0
1
;^
; |^
;0 exp 1
; |^
;^
;^ exp 2 ;^
; |^
;0 exp
; 1 ; |^
;^
exp
2
N j^
j j
N j^
j j N
k^
j^ j j
k
N
k^
j^ j j
k
M^
t^
p z t
z^
i^
z^ dz
p z t
z^
M^
t^
i^
z^ d
M^
t^
iz p z t
z^
i^
z^ dz M^
t
z p z t
z^
i^
z^ d
i
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^ ^ ^
^
^
^
^
2
0
1
; 1 ; |^
;^
exp
2
N
k^
k^
j^ j j
k^
M^ t k
z p z t
z^
i^
i^
z^ d
z
^
^
^ ^
^
^
^
^
^
^
^
^
Docsity.com
13
^
^ 2
2 1
1 1 2
2 2 1
(^1 )
1
2
2 2
1 1
2 2
2 2
(^1 )
1 2 1 2
1
1
2
;^ 1, 2,
, 2^
exp^
;^ 1, 2,
, 2
1
N^
m^ m j^ j^
jk
j^
j^ k j^
j^ k
N^
N^ N j^ j^
jk^ j^ k
j^
j^ k j
N
N^ N N^ N^
jk^ j^ k j^ k
i
i^
i^
i
i^ i p^
p
z p t^
z^
z^ z
M^
M^
M
t
d
d^
d dt^
dM
M
d dt^
i^
N^
t^
t^ i^
N
^
^
^
^
^
^
^ ^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^ ^
^
(^0) i (^) diagonal matrix with entries exp
i
i
t
t
^
^
Docsity.com
14
^ ^
^
^ ^
^ ^
^
^
2 2
2 2
1 1
1 1 2 2 1 1
2 2 1 1
Consider
&
1
1
2
(^212)
1 2 i^
l
N^ N^
N^ N
i^ i^
l^ l
jk^ j^ k^
jk^ j^ k
j^ k^
j^ k i^ l^
l^ i
i^ i^ l^
l^ i^ l^
l^ i^
i^ l^
N^ N
jk^ j^ k j^ k
l^ i^
l^ i N N
i^ l^
jk j^ k d^
d
dM^
dM
a^
b
M^
M dM
a^
b^
d^
d
M
d^
dM
^ ^
^
^
^ ^
^ ^
^
^ ^
^
^ ^
^ ^
^
^ ^
^
^ ^
^
^
^
^
^
^ ^ ^ ^
^
^
^
2 2 1 1 Multiply both sides by
and sum over
and 2 1 2
j^ k il
N^ N
il
l^ i
i^ l^
i^ l
M
i^ l
dM^
d
M
^
^ ^ ^
Docsity.com
16
^
^
^
0
0 0
0 0
0
0 0
(^0 00 ) (^1) exp 0 0
exp 2 1 exp^
2 1
1
,^ exp
2
2
1 exp^
2 This is the characteristic function of a multivariateGaussian PDF.
t^
t
t^
t t t^
t^
t
t^
t^
t
M^
i^ z
M^
i^ z M^
t^
i^ z i^ z
^
^
^
^
^
^
^
^
^
^ ^ ^
^
^
^
^ ^
^
^
^
^
^
^
^
^
^
^
^
^
^ ^
^
^
^
^
^
The mean vector and covariance matrix can be evaluated fromthe charateristic function.The PDF in the original coordinate system can be obtainedby using the transformation
. Y^ t^
Z t
Docsity.com
17
RemarksFor linear systems, the exact solution can also be obtained using convolution integral approach discussed earlier in this course.The Markov vector approach does not offer any special advantage
2 2
0
0 0
0
here.The above formulation is also valid when excitations are modeled asfiltered white noise excitations.^2
;^ 0;
0
;^0
2
;^ 0;
0
;^0
0;^
2
x^
x^
x^ f^
t^ t^
x^
x^ x^
x
f^
f^
f^ w t
t^
f^
f^ f^
f
w t^
w t w t
D
X^ t^
x t^
x t^
f^ t
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
is Markov^0 0;^
t f t 0
dX^ t^
PXdt^
QdB t t
X
X
^
^
^
Docsity.com
19
^ ^
^
^ ^ ^
^ ^
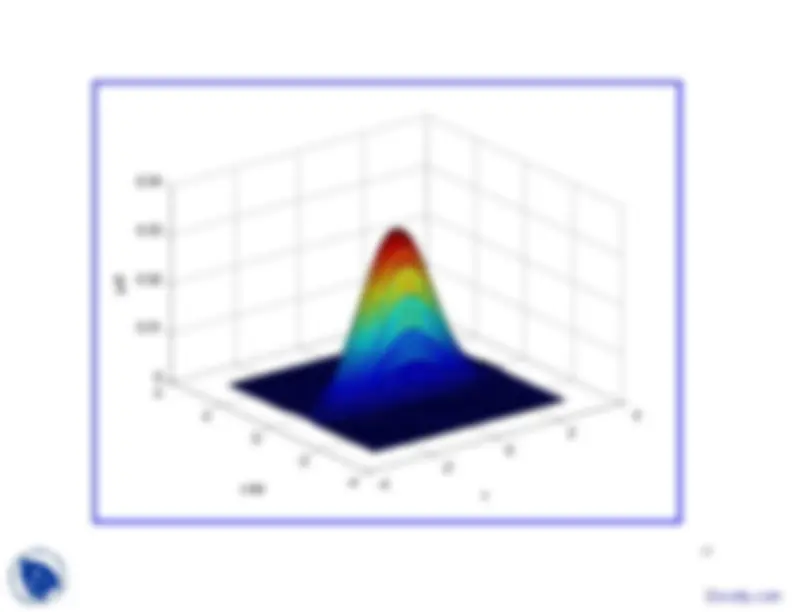
2 2 0 0; lim^32
0
1 exp^
;
Select C such that
1
Example:
1 exp^
; 2
4
0
pdf is Gaussian, as it should be.
x x
d^
x^ p^
d^ pD
p x
dx^
dx dpD
x^ p dx p x^
C^
s ds^
x
D p x dx x^ ax
bx ax^
bx
p x^
C^
x
D b
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^
^ ^
Docsity.com
20
^ ^
^ ^
^
^ ^
^
^
^
^
^
^
^
^ ^
^
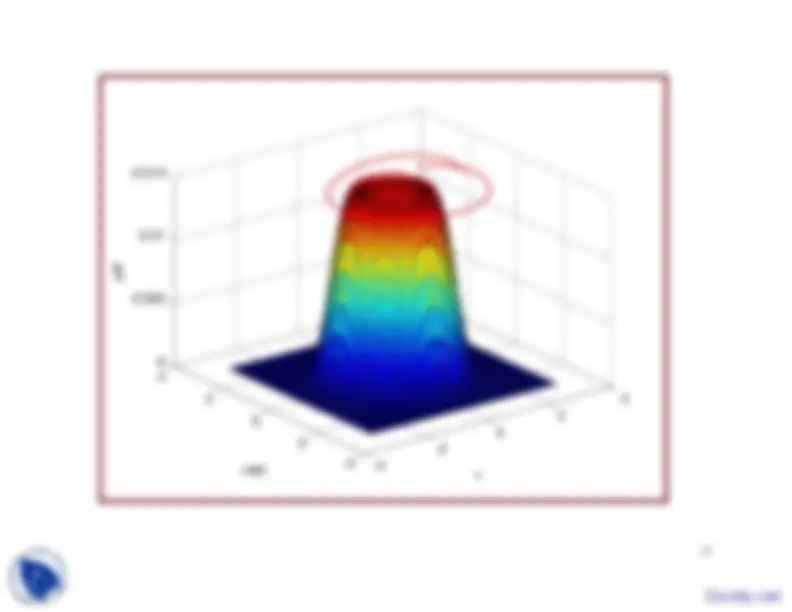
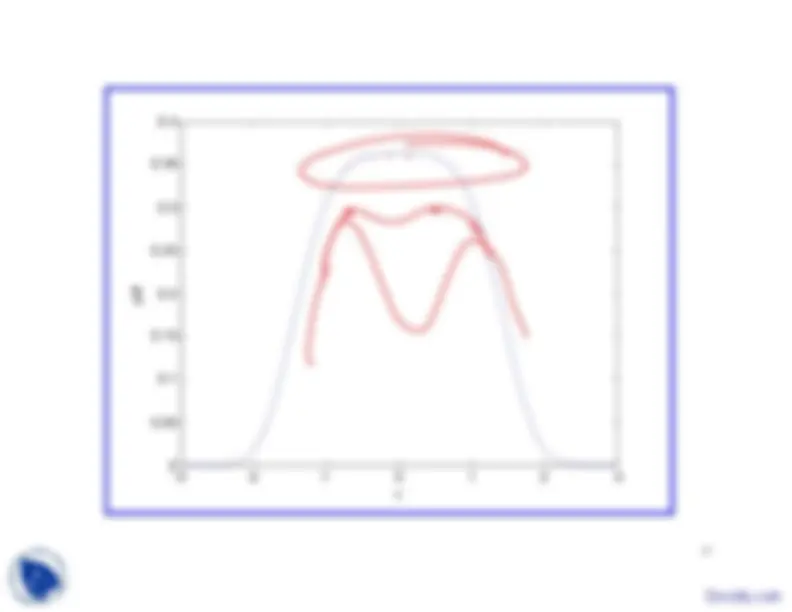
0
0
(^20121 )
2
1
sdof system with nonlinear damping and
nonlinear stiffness
;^ 0;
0
;^0
.
0;^
2 Total energy x 2 x^ xf
H^
g^ x^
w t^
t^
x^
x^ x^
x
w t^
w t w t
D
xH
g u du X^ t^
x t X^ t^
x t dX^ t
X
t dt dX^
t^
X g^
H^ g^ X
^
^
^
^
^
^
^
^
^
^ ^
^
^ ^
^
^ ^
^
^ ^
^
^ ^
^ ^
Example :^ ^ ^
^
1 ^ X 2 2 20
dt^ dB t
XH
g u du
^
^
^
^
Docsity.com