



More Angular Momentum, then
Statics
docsity.com



Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The concept of angular momentum for a particle and a rigid body, the relationship between torque and angular momentum, and the phenomenon of precession. It also covers the conditions for equilibrium and the concept of a free body diagram.
Typology: Slides
1 / 16

This page cannot be seen from the preview
Don't miss anything!
position from the origin O.
origin is
for part of a rigid body rotating about an axis: but also works for a particle flying through space.
p
r
L = r × p
Viewing the x -axis as coming out of the slide, this is a “right-handed” set of axes: (^) ˆ ˆ ˆ i × j = + k
p
r^
L = r × p
O x
z
y
m
Rotational Motion of a Rigid Body
that
the vector sum of the applied torques, and the being measured about a fixed origin O.
particles, so the same equation holds.
accelerating,
/ (^) i i
dL dt = (^) ∑ τ
τ i
dL CM (^) / dt = (^) ∑ τ CM
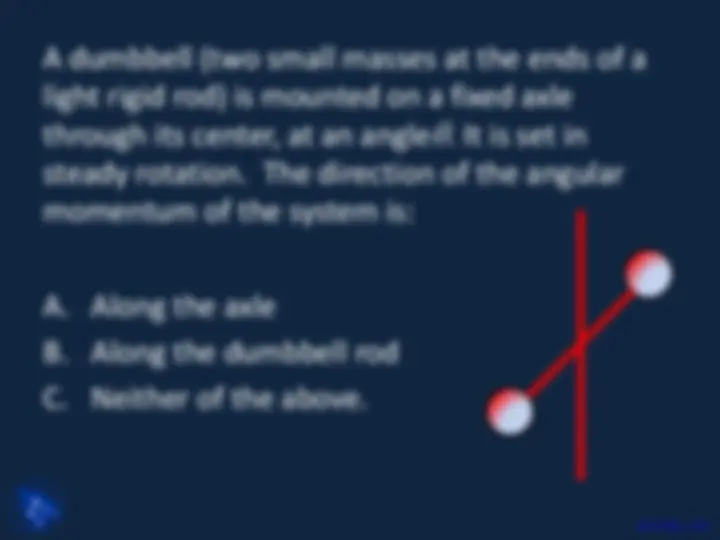
through its center, at an angle θ. It is set in
Spinning Top
d
mg
ω^ ^
τ = d × mg
τ = dL / dt = Id ω / dt
d ω
ω
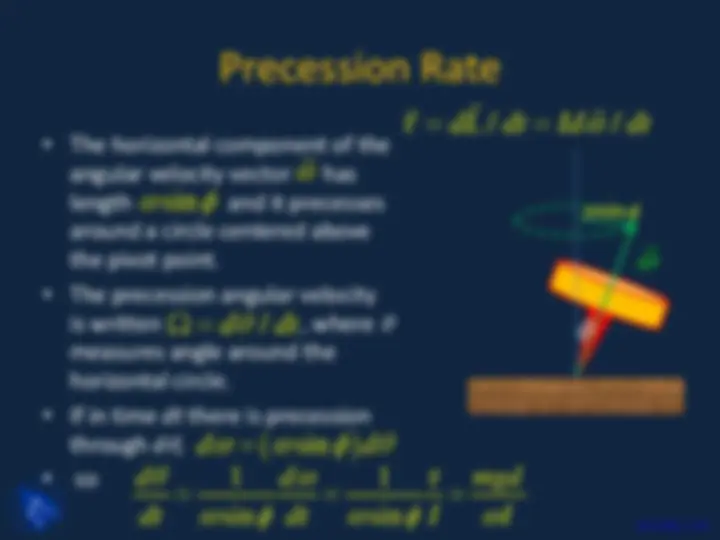
Precession Rate
τ = dL / dt = Id ω / dt
φ
ω sinφ ω sinφ
Ω = d θ / dt
d ω =( ω sinφ (^) ) d θ 1 1 sin sin
d d mgd dt dt I I
θ ω τ ω φ ω φ ω
= = =
Free Body Diagrams
Flat Forces?
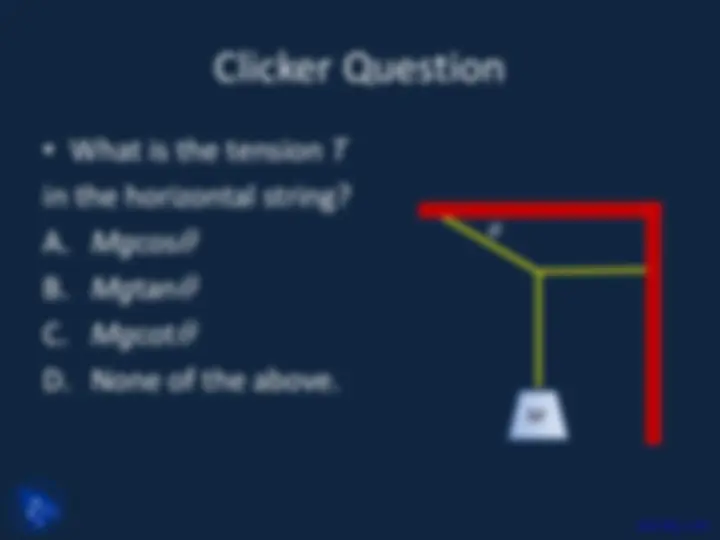
Clicker Question
Three Force Equilibrium
Clicker Question
T in the top string, given the mass is 2 kg, and it’s hung from the midpoint of the rod, which is light and hinged, the angle is 30°?
A. 10 N
B. 20 N
C. 20 √3 N
D. 40 N