SEE 2113 KAWALAN: PEMODELAN DAN SIMULASI
ZHI
4-43
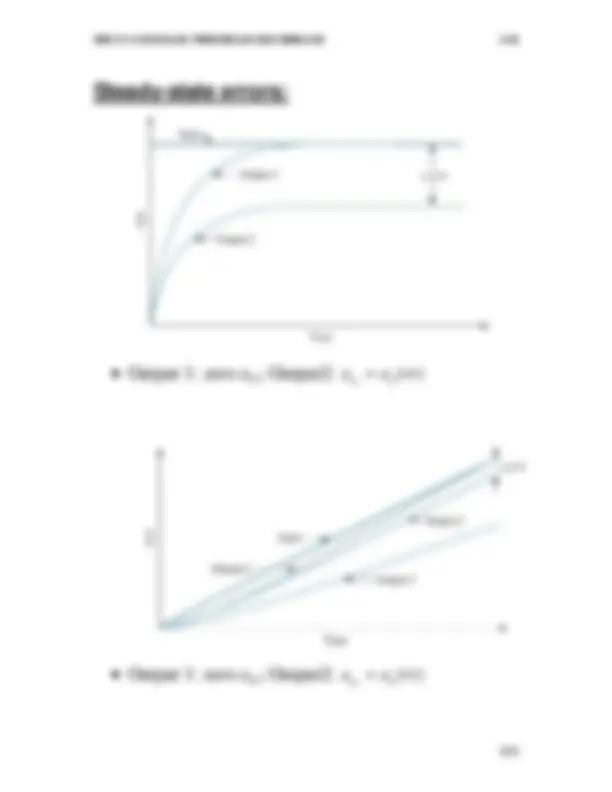
Steady-State Errors
• Three performance criteria in analysis and design
of control systems:
o Transient response
o Stability
o Steady-state errors
• Transient response of 1st and 2nd order systems
have been discussed in previous lectures.
• This section focuses on steady-state errors of the
time response of a particular system.
Definition
• Steady-state error is the difference between the
input and the output for a prescribed test input as
∞→t.
• Test inputs used for steady-state error analysis and
design are summarized in Table 7.1.
• Use for stable systems only.