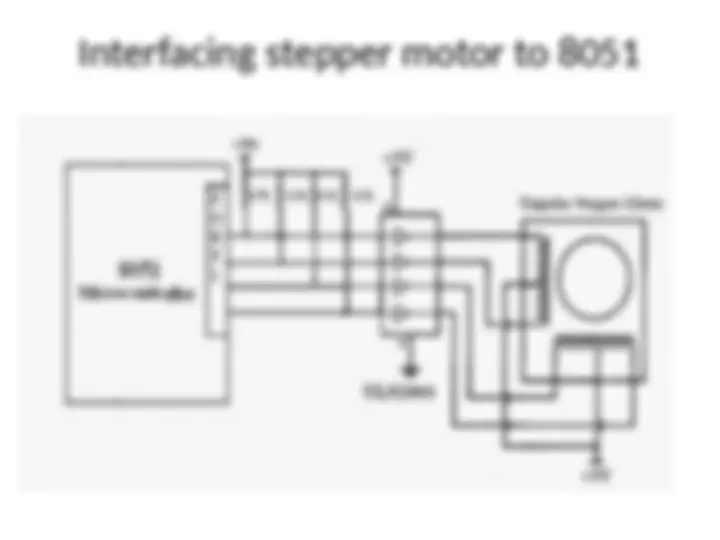
Stepper motor
•Stepper motor is a widely used device that translates
electrical pulses in to mechanical movement.
•In applications such as robotics stepper motor is
used for position control.
•Stepper motor is brushless DC motor, which can be
rotated in small angles, these angles are called steps.
Generally stepper motor use 200 steps to complete
360 degree rotation, means its rotate 1.8 degree per
step.