


Stereopsis





















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An overview of stereo vision, a technique used to recover depth information from two or more images. It explains the concept of stereo vision, the importance of solving the correspondence problem, and various methods for finding correspondences. The document also discusses the epipolar constraint and photometric constraint, which are used to improve matching accuracy. It includes references to relevant research papers.
Typology: Study notes
1 / 32

This page cannot be seen from the preview
Don't miss anything!
all or nothing (tend to give credit unless answer is very far off)
i. (answers for 'perspective projection' were uniformly weak, so I was unusually
liberal with credit)
iii must mention parallel linesiv. Partial credit unavoidable here. -.5 per missedvi. Must mention neighbors, or a neighborhood, etc.x.
must say power per unit area, (Can use meters^2 instead of area, etc.)
I write OK if their answer is less than great, but I'm not taking off credit#3 4 pts formula for convolution of filter H with image I. Don't care about if they
put limits on the summation.8 pts the actual output. 1 pt per pixel. (there are 8 pixels fully covered.)
#4 9 pts -0 If they choose mask 1, regardless of reasoning'
-4 if they choose mask 2 or mask 3, and give some reasonably plausiblereasoning'-9 if they choose mask 4, or choose (2 or 3) with very bad reasoning
Mark Twain at Pool Table", no date, UCR Museum of Photography
Woman getting eye exam during immigration procedure at Ellis
Island, c. 1905 - 1920 , UCR Museum of Phography
22
2 2
2 2
11
1 1
1 1
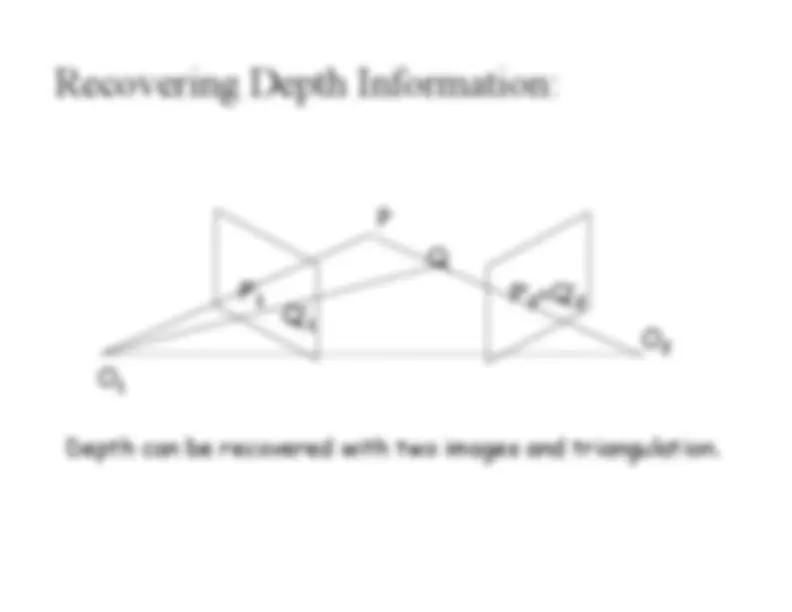
Depth can be recovered with two images and triangulation. Depth can be recovered with two images and triangulation.
Slide adapted from: Darrell
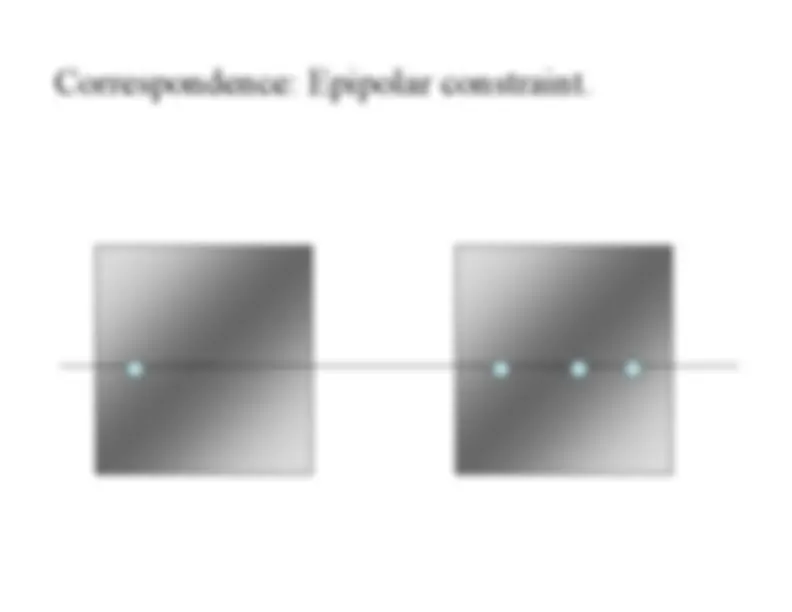
Determine Pixel Correspondence
Pairs of points that correspond to same scene point
conjugate epipolar lines
epipolar plane
epipolar lineepipolar line
epipolar lineepipolar line
(Seitz)
f f
f f
l l
r r
e e
l l
e e
r r
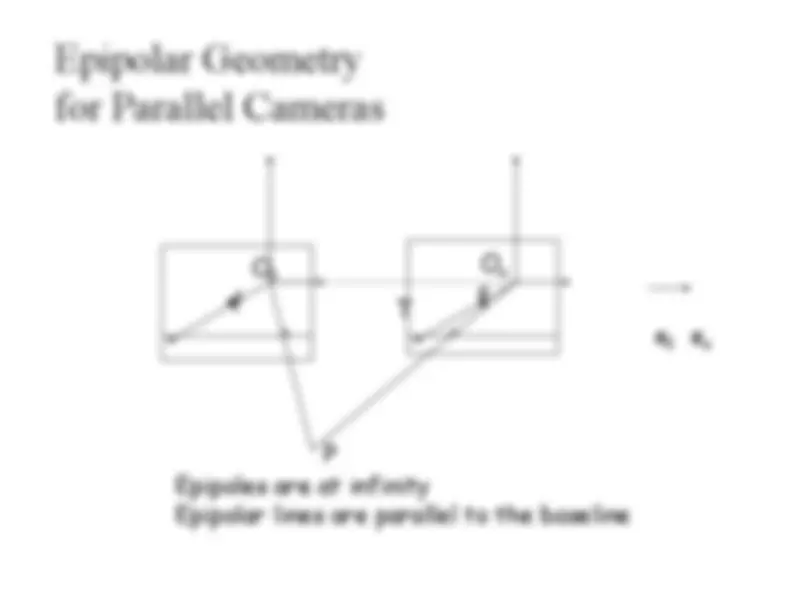
Epipoles Epipoles are at infinity
are at infinity
Epipolar Epipolar lines are parallel to the baseline
lines are parallel to the baseline
We can always achieve thisgeometry with image rectification•
Image Reprojection
reproject image planes onto commonplane parallel to line between optical centers
Notice, only focal point of camera really matters
(Seitz)
Correspondence: What should we match?•
22
2 2
2 2
11
1 1
11
Julesz: had huge impact because it showed thatrecognition not needed for stereo.