



Stochastic Model Predictive Control
•stochastic finite horizon control
•stochastic dynamic programming
•certainty equivalent model predictive control
Prof. S. Boyd, EE364b, Stanford University
docsity.com









Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Dr. Hanumant Chawd delivered this lecture at Alagappa University for Convex Optimization course. Its main points are: Stochastic, Model, Predictive, Control, Dynamic, Programming, Equivalent, Model, Causal, State, Feedback
Typology: Slides
1 / 15

This page cannot be seen from the preview
Don't miss anything!
stochastic finite horizon control
stochastic dynamic programming
certainty equivalent model predictive control
Prof. S. Boyd, EE364b, Stanford University
docsity.com
linear dynamical system, over finite time horizon:
x
t
Ax
t
Bu
t
w
t
t
x
t
n
is state,
u
t
m
is the input at time
t
w
t
is the process noise (or exogeneous input) at time
t
t
x
0
,... , x
t
is the state history up to time
t
causal state-feedback control:
u
t
φ
t
t
ψ
t
x
0
, w
0
,... , w
t
−
1
t
φ
t
(
t
+1)
n
m
called the control
policy
at time
t
1 docsity.com
an infinite dimensional problem: variables are
functions
φ
0
,... , φ
T
−
1
can restrict policies to finite dimensional subspace,
e.g.
φ
t
all affine
key idea: we have
recourse
(a.k.a. feedback, closed-loop control)
we can change
u
t
based on the observed state history
x
0
,... , x
t
cf standard (‘open loop’) optimal control problem, where we committo
u
0
,... , u
T
−
1
ahead of time
in general case, need to evaluate
(for given control policies) via
Monte Carlo simulation
3 docsity.com
let
t
t
be optimal value of objective, from
t
on, starting from initial
state history
t
T
T
T
x
T
⋆
0
x
0
t
can be found by backward recursion: for
t
t
t
) = inf
v
∈U
t
x
t
, v
t
t
, Ax
t
Bv
w
t
t
t
t
are convex functions
optimal policy is causal state feedback
φ
⋆t
t
) = argmin
v
∈U
t
x
t
, v
t
t
, Ax
t
Bv
w
t
t
4 docsity.com
special case of linear stochastic control
t
m
x
0
, w
0
,... , w
T
−
1
are independent, with
x
0
w
t
x
0
x
T 0
w
t
w
Tt
t
t
x
t
, u
t
x
Tt
t
x
t
u
Tt
t
u
t
, with
t
t
T
x
T
x
TT
T
x
T
, with
T
6 docsity.com
can show value functions are quadratic,
i.e.
t
x
t
x
Tt
t
x
t
q
t
t
Bellman recursion:
T
T
q
T
; for
t
t
z
inf
v
z
T
t
z
v
T
t
v
Az
Bv
w
t
T
t
Az
Bv
w
t
q
t
works out to
t
T
t
T
t
T
t
t
−
1
T
t
t
q
t
q
t
Tr
t
t
7 docsity.com
at every time
t
we solve the certainty equivalent problem
minimize
T
−
1
τ
=
t
t
x
τ
, u
τ
T
x
T
subject to
u
τ
τ
τ
t,... , T
x
τ
Ax
τ
Bu
τ
w
τ
|
t
τ
t,... , T
with variables
x
t
,... , x
T
u
t
,... , u
T
−
1
and data
x
t
w
t
|
t
w
T
−
1
|
t
w
t
|
t
w
T
−
1
|
t
are predicted values of
w
t
,... , w
T
−
1
based on
t
e.g.
, conditional expectations)
call solution
˜x
t
x
T
u
t
˜u
T
−
1
we take
φ
mpc
t
u
t
φ
mpc
is a function of
t
since
w
t
|
t
w
T
−
1
|
t
are functions of
t
9 docsity.com
widely used,
e.g.
, in ‘revenue management’
based on (bad) approximations: –
future values of disturbance are exactly as predicted; there is nofuture uncertainty
in future, no recourse is available
yet, often works very well
10 docsity.com
sample trace of
x
1
and
u
1
0
10
20
30
40
50
−1 −
2 1 0
0
10
20
30
40
50
−0.
0
x 1 )t( u
1 )t(
t
Prof. S. Boyd, EE364b, Stanford University
12 docsity.com
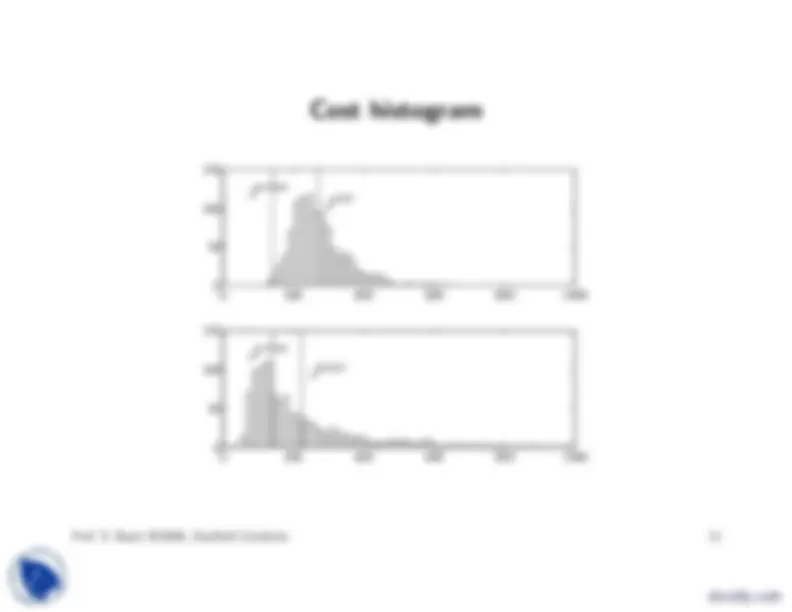
0
200
400
600
800
1000
0 50 150 100
0
200
400
600
800
1000
0 50 150 100
J
mpc
J
relax
J
relax
J
sat
13 docsity.com