



VI. (Introduction to)
Structural Dynamics









Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This lecture note is part of Material and Structures course. It was provided by Prof. Aparijita Singh at Andhra University. It includes: Structural, Dynamics, Quasi-static, Process, Wave, Propagartion, Mass, Spring, Deflection, Response, Load, Oscillating, Magnitude, Frequency, Forcing, Fuction
Typology: Exercises
1 / 20

This page cannot be seen from the preview
Don't miss anything!
Fall, 2002
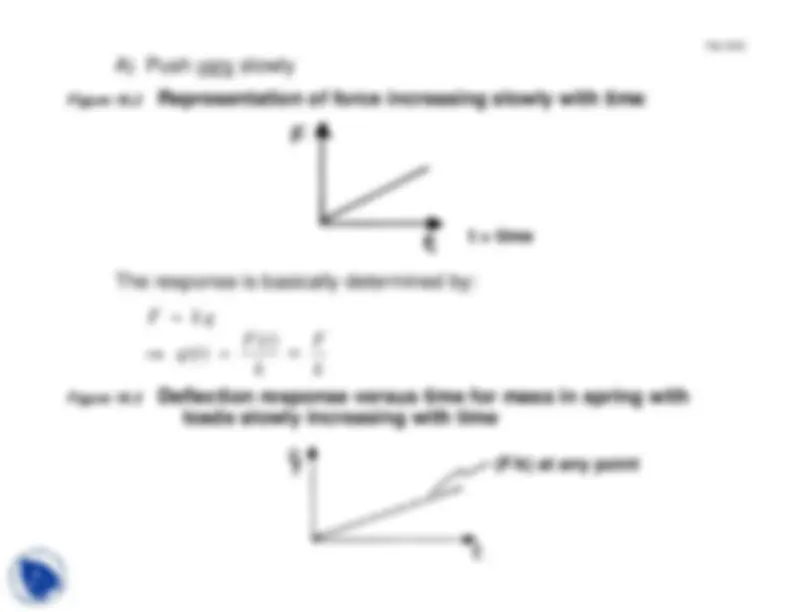
C. Wave PropagationB. Dynamic A. (Quasi) - Static [“quasi” because the load must first be applied]
What is the key consideration in determining which regime one is in?
--> the frequency of the forcing function
Example
: Mass on a Spring
Figure 19.
Representation of mass on a spring
Fall, 2002
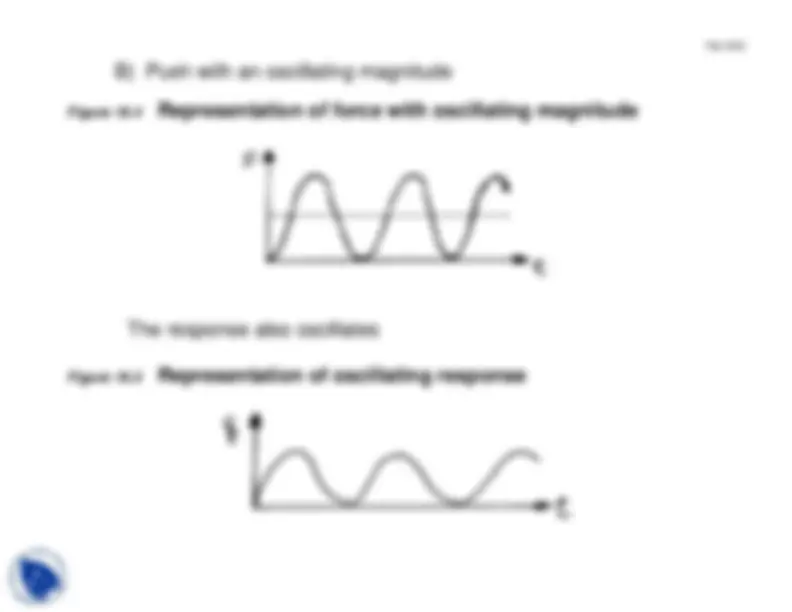
B) Push with an oscillating magnitude
Figure 19.
Representation of force with oscillating magnitude
The response also oscillates
Figure 19.
Representation of oscillating response
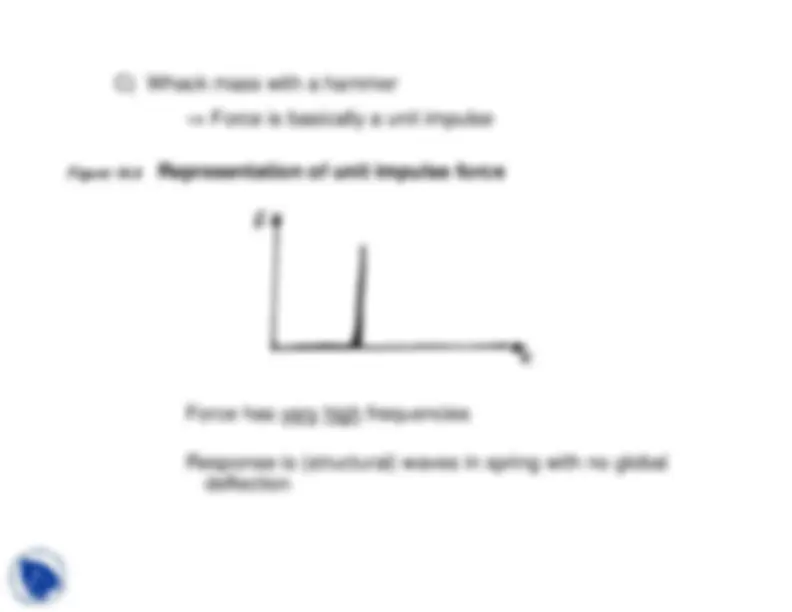
C) Whack mass with a hammer
Force is basically a unit impulse
Figure 19.
Representation of unit impulse force
Force has
very high
frequencies
Response is (structural) waves in spring with no global
deflection
--> These are not well-defined borderlines
depends on specifics of configuration
actually transition regions, not borders
interactions between behaviors
Figure 19.8 So illustration is:
Representation of regions of structural response versus
frequency of forcing function
(Structural)
Wave
(Quasi) - Static
Dynamics
Propagation
Static
f(natural
f(speed of
frequency of
waves in
structure)
material)
= region of transition
Fall, 2002
(Structural) Dynamics -- 16.221 (graduate course).Waves -- Unified Statics -- Unified and 16.20 to date
The Spring-Mass System
Figure 19.9 Are probably used to seeing it as:
General representation of spring-mass system
where:
(
)
(derivative with respect to time)
Drawing the free body diagram for this configuration:
Figure 19.
Free body diagram for spring-mass system
∑ F = 0 ⇒ F −
system (no damping) Basic spring-mass
This is a 2nd order Ordinary Differential Equation in
time
When the Ordinary/Partial Differential Equation is in
space
, need
Boundary
Conditions. Now that the Differential Equation is in time,
need
Initial
Conditions.
Figure 19.12 constant c which produces a force in proportion to the velocity:For the spring-mass system, this is represented by a dashpot with a
Representation of spring-mass system with damping
[Force/length]
[Force/length/time]
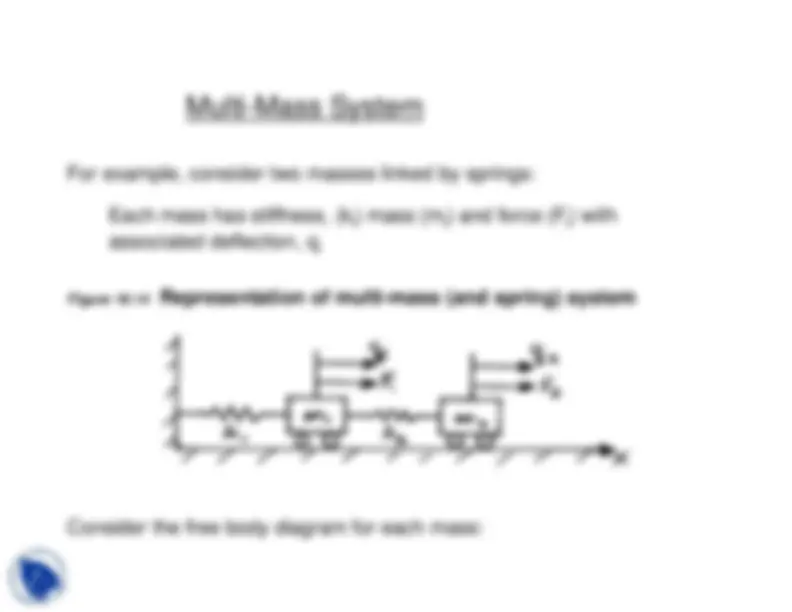
Multi-Mass System
For example, consider two masses linked by springs:
Each mass has stiffness, (k
i) mass (m
i) and force (F
i) with
associated deflection, q
i
Figure 19.
Representation of multi-mass (and spring) system
Consider the free body diagram for each mass:
q
Mass
Figure 19.
Face body diagram of Mass 1 in multi-mass system
∑
yields:
1
k 2 (^) ( q 2
− (^) q
1 (^) )
−
k q
− m 1 1 = 0
1
1
q q
Write in matrix form:
m 1
1 (^)
( k 1
(^) k 2 (^) )
k 2 (^) ^ q 1 (^)
1 (^)
m 2 (^) (^) ˙˙ 2 (^)
− k 2 k 2
q 2 (^)
2 (^)
or:
mq
˙˙
kq
mass
stiffness matrix
matrix
Note that the stiffness matrix is symmetric (as it has been in all
other considerations)
ij
ji
This formulation can then be extended to 3, 4….n masses with
m
i = mass of unit i
k i = stiffness of spring of unit i
q i = displacement of unit i
i = force acting on unit i
etc.
Fall, 2002
Dynamic Structural Loads
Generic sources of dynamic loads:
Wind (especially gusts)
Impact
Unsteady motion (inertial effects)
Servo systems
How are these manifested in particular types of structures?
A response which is comprised of two parts: What does this all result in? Earthquakes and Buildings Civil StructuresAutomobiles, Trains, etc.
rigid-body motion
elastic deformation and vibration of structure
Note that:
of the static valuesPeak dynamic deflections and stresses can be several times that
Dynamic response can (quickly) lead to fatigue failure
(Helicopter = a fatigue machine!)
Discomfort for passengers
(think of a car without springs)
Solutions for spring-mass systems
systemHow to model a continuous system as a discrete spring-mass
then…
Extend the concept to a continuous system