Download Affine Structure-from-Motion: Understanding Two Frames and Transformations - Prof. David J and more Exams Computer Science in PDF only on Docsity!
Structure-from-Motion
-^
Determining the 3-D structure of the world, and/or themotion of a camera using a sequence of imagestaken by a moving camera.^ – Equivalently, we can think of the world as moving and the
camera as fixed.
-^
Like stereo, but the position of the camera isn’tknown (and it’s more natural to use many imageswith little motion between them, not just two with a lotof motion).^ – We may or may not assume we know the parameters of the
camera, such as its focal length.
Structure-from-Motion
- As with stereo, we can divide problem:
- Correspondence.– Reconstruction.
- Again, we’ll talk about reconstruction
first.^ – So for the next few classes we assume that
each image contains some points, and weknow which points match which.
Movie
Reconstruction
- A lot harder than with stereo.• Start with simpler case: scaled
orthographic projection (weakperspective).^ – Recall, in this we remove the z coordinate
and scale all x and y coordinates the sameamount.
Perspective -> Scaled
Orthographic
xi
,y
,zi
) -> (xi
/zi
, yi
/zi
)i
Z = (z
+z 1
2
+ …+z
)/nn
xi
,y
,zi
) approx-> (xi
/Z, yi
/Z)i
The Equation of Weak
Perspective
) , ( ) , ,
(^
y x s z y x
→
-^ s
is constant for all points.
- Parallel lines no longer converge, they remainparallel.
� � � � � � � � � ����� ��� �
� �� �
� �� � � �� �
1 0 0
0
0 0 0
X Y^ Z
s s
x y
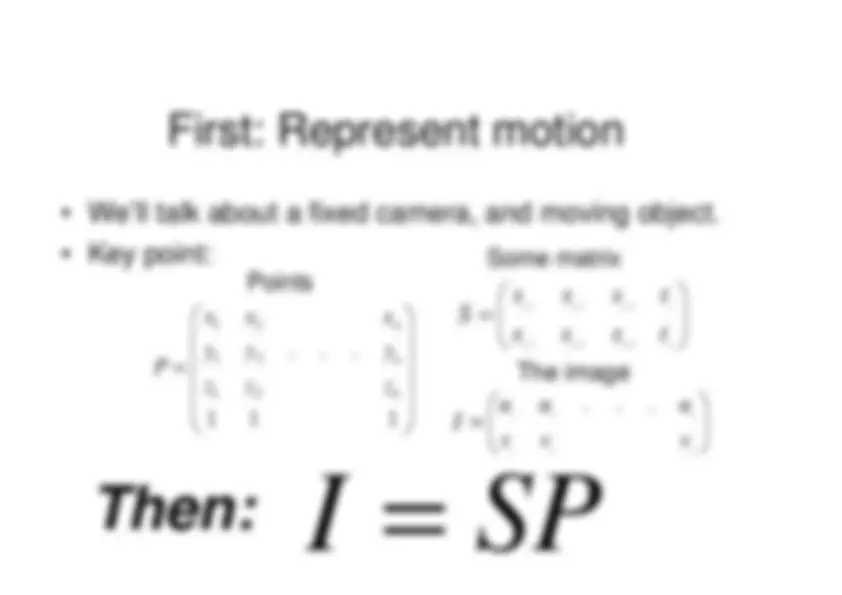
First: Represent motion
-^
We’ll talk about a fixed camera, and moving object.
-^
Key point:
�� � � � � �
�� � � �� �
1
1 1
. . . 2 1
2 1
2 1
n n z n
z z
y
y y
x
x x
P
Points
=^
x ty
s
s
s
t
s
s
s
S^
(^3) , 2
(^2) , 2
(^1) , 2
(^3) , 1
(^2) , 1
(^1) , 1 Some matrix
� � �
� � �
n v n
v v
u
u u I
2 1
2 1
. . .
The image
SP
I
Then:
Remember what this means.• We are representing moving a set of points,projecting them into the image, and scaling them.• Matrix multiplication: take inner product betweeneach row of S and each point. First row of Sproduces X coordinates, while second row producesY. • Projection occurs because S has no third row.• Translation occurs with tx and ty.• Scaling can be encoded with a scale factor in S.• The rest of S must be allowing the object to rotate.
Structure-from-Motion
- S encodes:
- Projection: only two lines– Scaling, since S can have a scale factor.– Translation, by tx/s and ty/s.– Rotation:
SP
I
Rotation
P
r
r
r
r
r
r
r
r
r
� � � � �
� � � � �
(^3) , 3
(^2) , 3
(^1) , 3
(^3) , 2
(^2) , 2
(^1) , 2
(^3) , 1
(^2) , 1
(^1) , 1
Represents a3D rotation ofthe points in P.
Why does multiplying points by R rotate them?• Think of the rows of R as a new coordinate system.Taking inner products of each points with these expressesthat point in that coordinate system.
- This means rows of R must be orthonormal vectors(orthogonal unit vectors).
- Think of what happens to the points (1,0) and (0,1). Theygo to (cos theta, -sin theta), and (sin theta, cos theta). Theyremain orthonormal, and rotate clockwise by theta.
- Any other point, (a,b) can be thought of as a(1,0) +b(0,1). R(a(1,0)+b(0,1) = Ra(1,0) + Ra(0,1) = aR(1,0) +bR(0,1).
So it’s in the same position relative to the
rotated coordinates that it was in before rotation relativeto the x, y coordinates. That is, it’s rotated.
Simple 3D Rotation
� � � � �
� � �� �� �� � �
� � � � �
−
n n z n
z
z
y
y
y
x
x
x
2
1
2
1
2
1
... 1 0 0
0
cos
sin
0
sin
cos
θ
θ
θ
θ Rotation about z axis.Rotates x,y coordinates. Leaves z coordinates fixed.
- Intuitively, it makes sense that 3D rotations can beexpressed as 3 separate rotations about fixed axes.Rotations have 3 degrees of freedom; two describe anaxis of rotation, and one the amount.• Rotations preserve the length of a vector, and the anglebetween two vectors. Therefore, (1,0,0), (0,1,0), (0,0,1)must be orthonormal after rotation. After rotation, theyare the three columns of R. So these columns must beorthonormal vectors for R to be a rotation. Similarly, ifthey are orthonormal vectors (with determinant 1) R willhave the effect of rotating (1,0,0), (0,1,0), (0,0,1). Samereasoning as 2D tells us all other points rotate too.
- Note if R has determinant -1, then R is a rotationplus a reflection.
Questions?