


ESE 499 – Feedback Control Systems
SECTION 4: FIRST-AND
SECOND-ORDER SYSTEMS


















































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
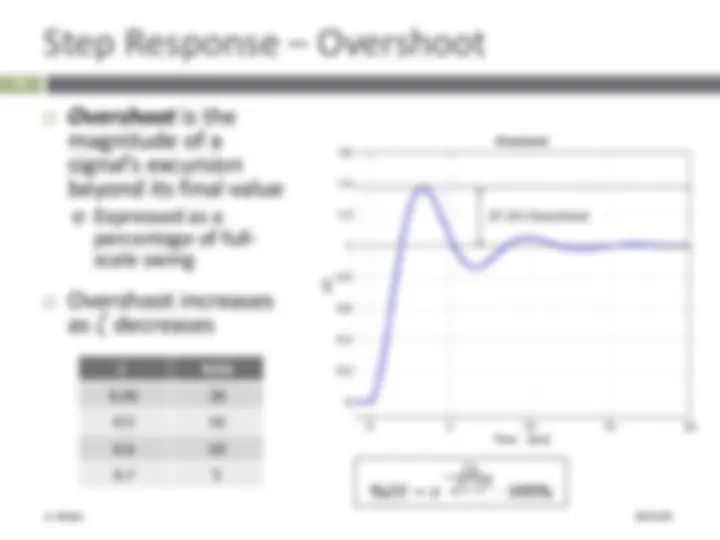
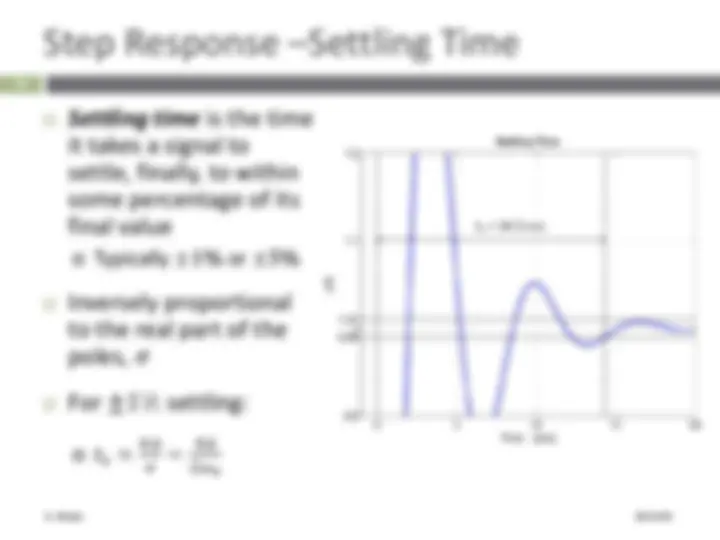
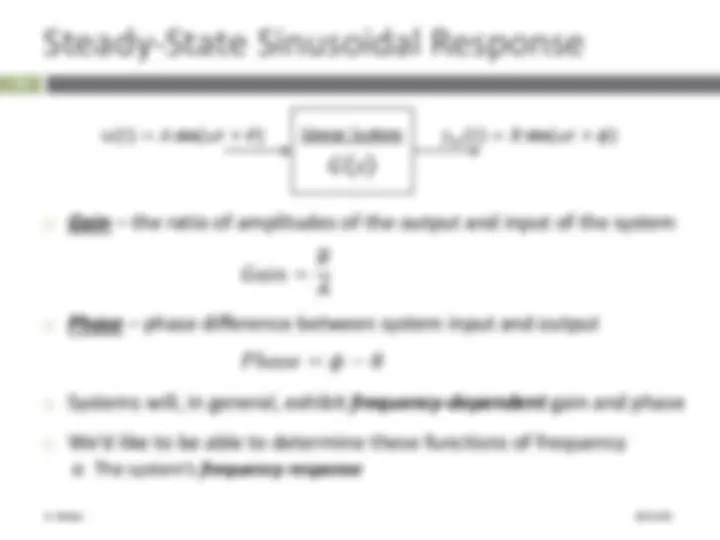
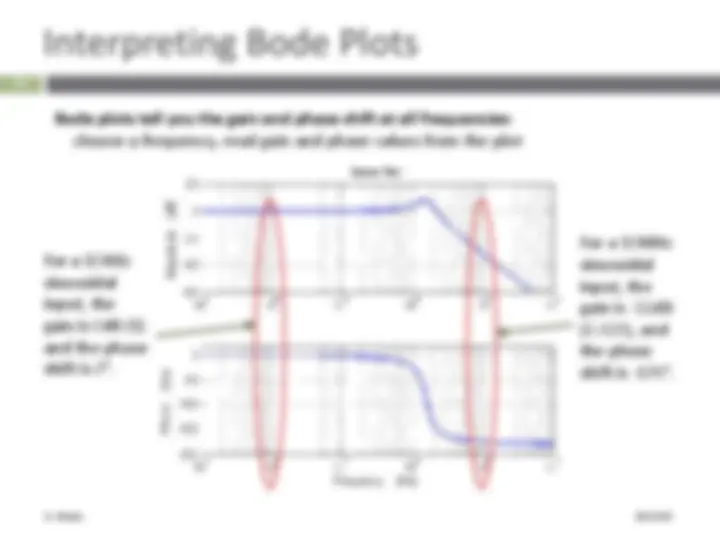
An in-depth analysis of frequency response and Bode plots in control systems, discussing concepts such as overshoot, settling time, the convolution integral, and the frequency response function. It also covers the terminology of gain response and the response of first- and second-order factors.
Typology: Summaries
1 / 111

This page cannot be seen from the preview
Don't miss anything!
2
First- and Second-Order Systems
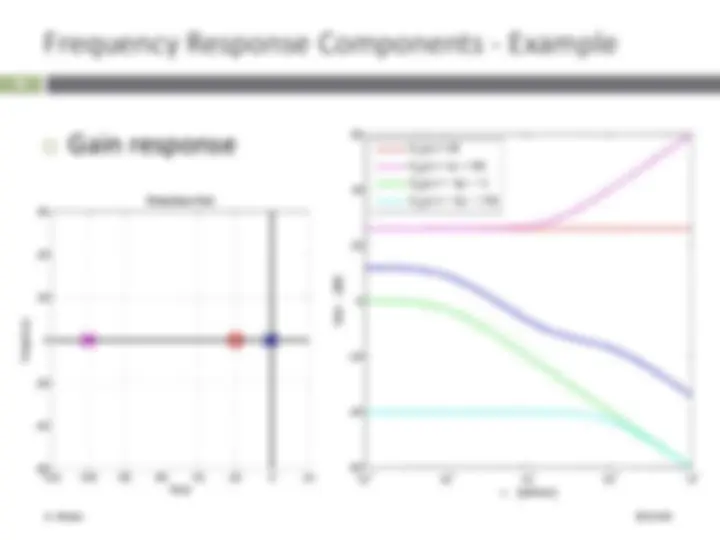
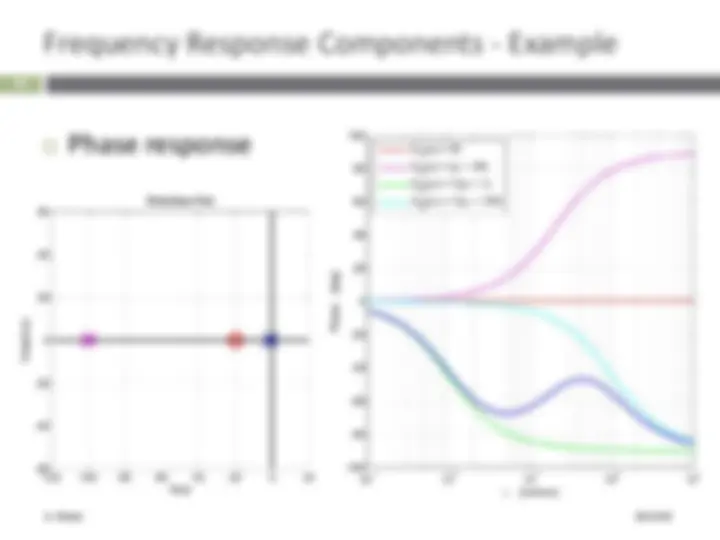
All transfer functions can be decomposed into 1 st- and 2 nd-order terms by factoring Δ 𝑠𝑠
𝐺𝐺 𝑠𝑠 =
𝑁𝑁𝑁𝑁𝑁𝑁 𝑠𝑠 𝑠𝑠 − 𝑝𝑝 1 ⋯ 𝑠𝑠 − 𝑝𝑝𝑛𝑛 𝑠𝑠 2 + 𝑎𝑎 11 𝑠𝑠 + 𝑎𝑎 10 ⋯ 𝑠𝑠 2 + 𝑎𝑎 (^) 𝑚𝑚1 𝑠𝑠 + 𝑎𝑎 (^) 𝑚𝑚
Real poles – 1 st^ -order terms Complex-conjugate poles – 2 nd^ -order terms
These terms and, therefore, the poles determine the nature of the time- domain response Real poles – decaying exponentials Complex-conjugate poles - decaying sinusoids
All time-domain responses will be a superposition of decaying exponentials and decaying sinusoids These are the natural modes or eigenmodes of the system
(^4) Response of First-Order Systems
5
First-Order System – Impulse Response
First-order transfer function:
𝐺𝐺 𝑠𝑠 =
𝐴𝐴 𝑠𝑠+𝜎𝜎
Single real pole at
𝑠𝑠 = −𝜎𝜎 = −
1
𝜏𝜏
where 𝜏𝜏 is the system time constant
Impulse response:
𝑔𝑔 𝑡𝑡 = ℒ −1^ 𝐺𝐺 𝑠𝑠 = 𝐴𝐴𝑒𝑒 −𝜎𝜎𝜎𝜎^ = 𝐴𝐴𝑒𝑒
−
𝑡𝑡 𝜏𝜏
𝑔𝑔 𝑡𝑡 = 𝐴𝐴𝑒𝑒
−
𝑡𝑡 𝜏𝜏
7
Impulse Response vs. Pole Location
8
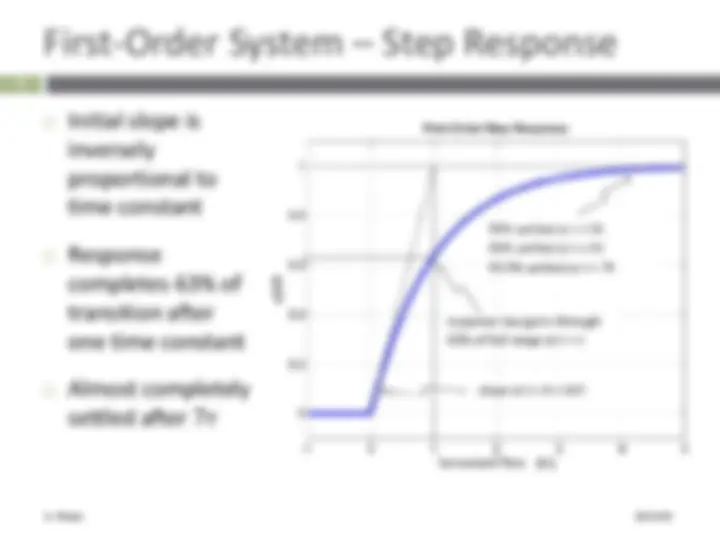
First-Order System – Step Response
Step response in the Laplace domain
𝑌𝑌 𝑠𝑠 =
1 𝑠𝑠 � 𝐺𝐺 𝑠𝑠^ =^
𝐴𝐴 𝑠𝑠 𝑠𝑠+𝜎𝜎
Inverse transform back to time domain via partial fraction expansion
𝑌𝑌 𝑠𝑠 =
𝐴𝐴 𝑠𝑠 𝑠𝑠+𝜎𝜎 =^
𝑟𝑟 1 𝑠𝑠 +^
𝑟𝑟 2 𝑠𝑠+𝜎𝜎
𝐴𝐴 = 𝑟𝑟 1 + 𝑟𝑟 2 𝑠𝑠 + 𝜎𝜎𝑟𝑟 1
𝑠𝑠 0 : 𝜎𝜎𝑟𝑟 1 = 𝐴𝐴 → 𝑟𝑟 1 =
𝐴𝐴 𝜎𝜎
𝑠𝑠 1 : 𝑟𝑟 1 + 𝑟𝑟 2 = 0 → 𝑟𝑟 2 = −
𝐴𝐴 𝜎𝜎
𝑌𝑌 𝑠𝑠 = 𝐴𝐴/𝑠𝑠 𝜎𝜎− 𝐴𝐴𝑠𝑠+𝜎𝜎/𝜎𝜎
Time-domain step response
− 𝜏𝜏𝜎𝜎
10
Step Response vs. Pole Location
11
Pole Location and Stability
First-order transfer function
where 𝑝𝑝 is the system pole Impulse response is
𝑔𝑔 𝑡𝑡 = 𝐴𝐴𝑒𝑒 𝑝𝑝𝜎𝜎
If 𝑝𝑝 < 0, 𝑔𝑔 𝑡𝑡 decays to zero Pole in the left half-plane System is stable
If 𝑝𝑝 > 0, 𝑔𝑔 𝑡𝑡 grows without bound Pole in the right half-plane System is unstable
13
Second-Order Systems
Second-order transfer function
𝑁𝑁𝑁𝑁𝑚𝑚 𝑠𝑠 𝑠𝑠 2 +𝑎𝑎 1 𝑠𝑠+𝑎𝑎 0
𝑁𝑁𝑁𝑁𝑚𝑚 𝑠𝑠 𝑠𝑠+𝜎𝜎 2 +𝜔𝜔𝑑𝑑^2
where 𝜔𝜔𝑑𝑑 is the damped natural frequency
Can also express the 2 nd-order transfer function as
𝑁𝑁𝑁𝑁𝑚𝑚 𝑠𝑠 𝑠𝑠 2 +2𝜁𝜁𝜔𝜔𝑛𝑛 𝑠𝑠+𝜔𝜔 (^) 𝑛𝑛^2
where 𝜔𝜔𝑛𝑛 is the un-damped natural frequency , and 𝜁𝜁 is the damping ratio
𝜎𝜎 𝜔𝜔 (^) 𝑛𝑛 Two poles at
𝑠𝑠 1 , 2 = −𝜎𝜎 ± 𝜎𝜎 2 − 𝜔𝜔𝑛𝑛^2 = −𝜁𝜁𝜔𝜔𝑛𝑛 ± 𝜔𝜔𝑛𝑛 𝜁𝜁 2 − 1
14
Categories of Second-Order Systems
The 2nd^ -order system poles are
𝑠𝑠 1 , 2 = −𝜁𝜁𝜔𝜔𝑛𝑛 ± 𝜔𝜔𝑛𝑛 𝜁𝜁 2 − 1
Value of 𝜁𝜁 determines the nature of the poles and, therefore, the response
𝜻𝜻 > 𝟏𝟏: Over-damped Two distinct, real poles – sum of decaying exponentials – treat as two first-order terms 𝑠𝑠 1 = −𝜎𝜎 1 , 𝑠𝑠 2 = −𝜎𝜎 2
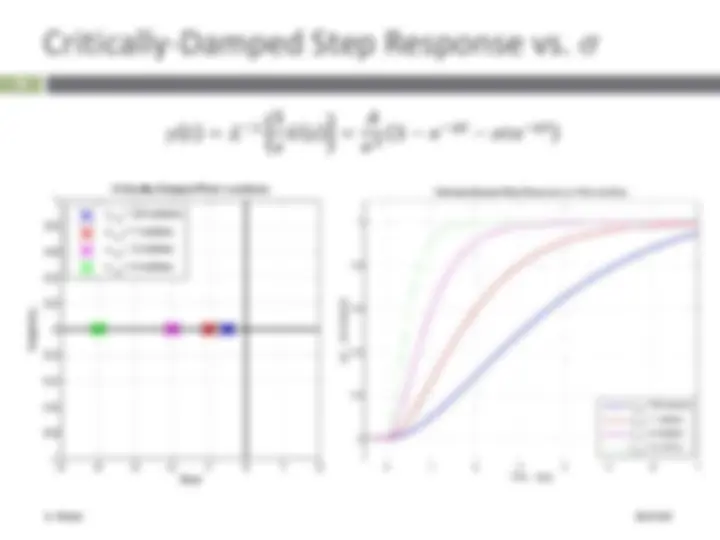
𝜻𝜻 = 𝟏𝟏: Critically-damped Two identical, real poles – time-scaled decaying exponentials 𝑠𝑠 1 , 2 = −𝜎𝜎 = −𝜁𝜁𝜔𝜔𝑛𝑛 = −𝜔𝜔𝑛𝑛
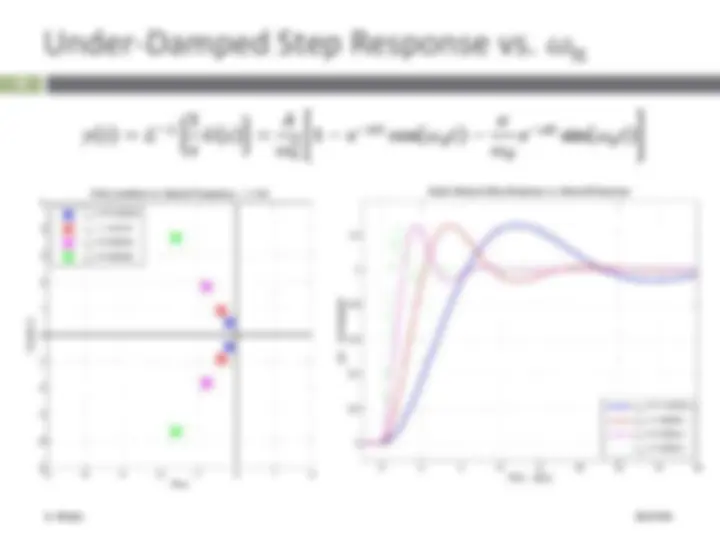
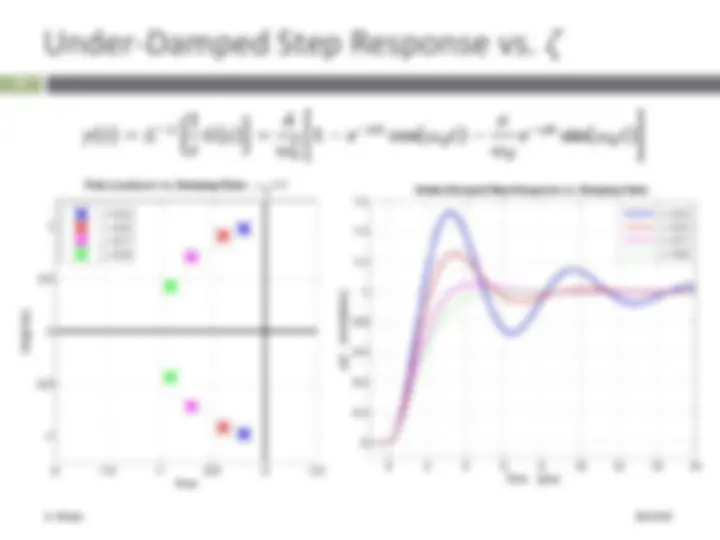
𝟎𝟎 < 𝜻𝜻 < 𝟏𝟏: Under-damped Complex-conjugate pair of poles – sum of decaying sinusoids 𝑠𝑠 1 , 2 = −𝜎𝜎 ± 𝑗𝑗𝜔𝜔 (^) 𝑑𝑑 = −𝜁𝜁𝜔𝜔𝑛𝑛 ± 𝑗𝑗𝜔𝜔𝑛𝑛 1 − 𝜁𝜁 2
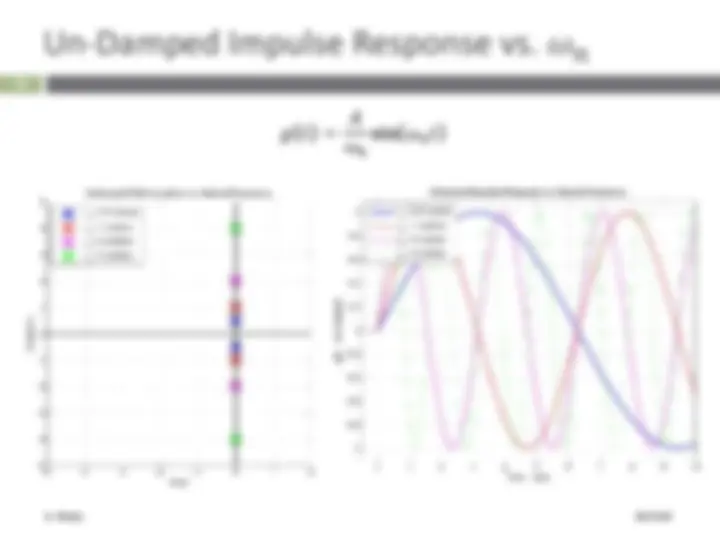
𝜻𝜻 = 𝟎𝟎: Un-damped Purely-imaginary, conjugate pair of poles – sum of non-decaying sinusoids 𝑠𝑠 1 , 2 = ±𝑗𝑗𝜔𝜔𝑛𝑛
16
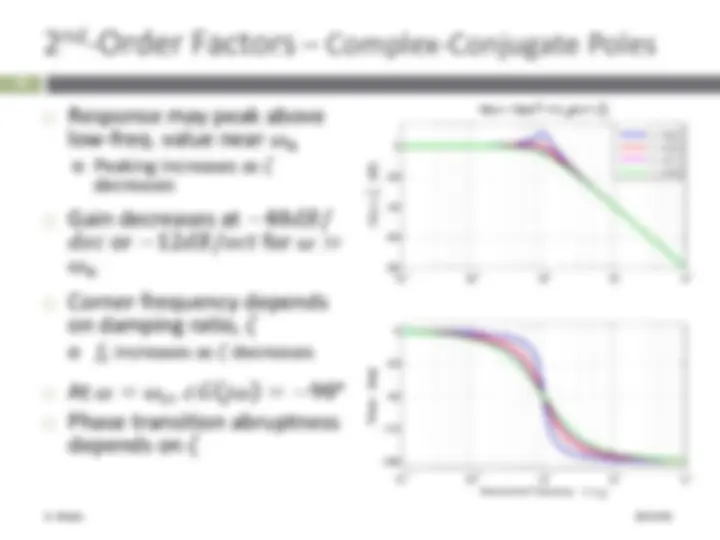
Second-Order Poles - 0 ≤ 𝜁𝜁 ≤ 1
Can relate 𝜎𝜎, 𝜔𝜔 (^) 𝑑𝑑, 𝜔𝜔𝑛𝑛,
and 𝜁𝜁 to pole location
geometry
𝜁𝜁 is a measure of system
damping
𝜁𝜁 =
= sin 𝜃𝜃
17
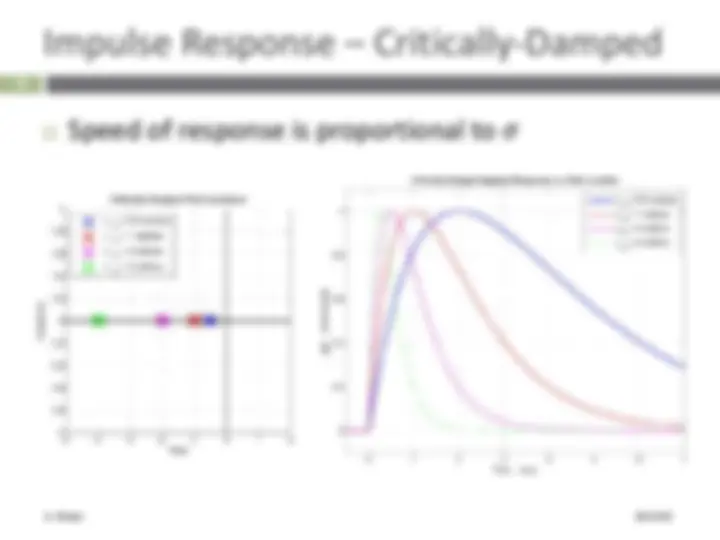
Impulse Response – Critically-Damped
For 𝜁𝜁 = 1, the transfer function reduces to
Impulse response
𝑔𝑔 𝑡𝑡 = ℒ −1^ 𝐺𝐺 𝑠𝑠
𝑔𝑔 𝑡𝑡 = 𝐴𝐴𝑡𝑡𝑒𝑒 −𝜎𝜎𝜎𝜎
19
Impulse Response – Under-Damped
For 0 < 𝜁𝜁 < 1, the transfer function is
𝐺𝐺 𝑠𝑠 =
𝐴𝐴 𝑠𝑠 2 + 2𝜁𝜁𝜔𝜔𝑛𝑛 𝑠𝑠 + 𝜔𝜔𝑛𝑛^2
Complete the square on the denominator
𝐺𝐺 𝑠𝑠 =
𝐴𝐴
𝑠𝑠 + 𝜁𝜁𝜔𝜔𝑛𝑛 2 + 𝜔𝜔𝑛𝑛 1 − 𝜁𝜁 2
2 =^
𝐴𝐴 𝑠𝑠 + 𝜁𝜁𝜔𝜔𝑛𝑛 2 + 𝜔𝜔 (^) 𝑑𝑑^2
Rewrite in the form of a damped sinusoid
𝐺𝐺 𝑠𝑠 =
𝐴𝐴 𝜔𝜔 (^) 𝑑𝑑
𝜔𝜔 (^) 𝑑𝑑 𝑠𝑠 + 𝜁𝜁𝜔𝜔𝑛𝑛 2 + 𝜔𝜔 (^) 𝑑𝑑^2
=
𝐴𝐴 𝜔𝜔 (^) 𝑑𝑑
𝜔𝜔 (^) 𝑑𝑑 𝑠𝑠 + 𝜎𝜎 2 + 𝜔𝜔 (^) 𝑑𝑑^2
Inverse Laplace transform for the time-domain impulse response
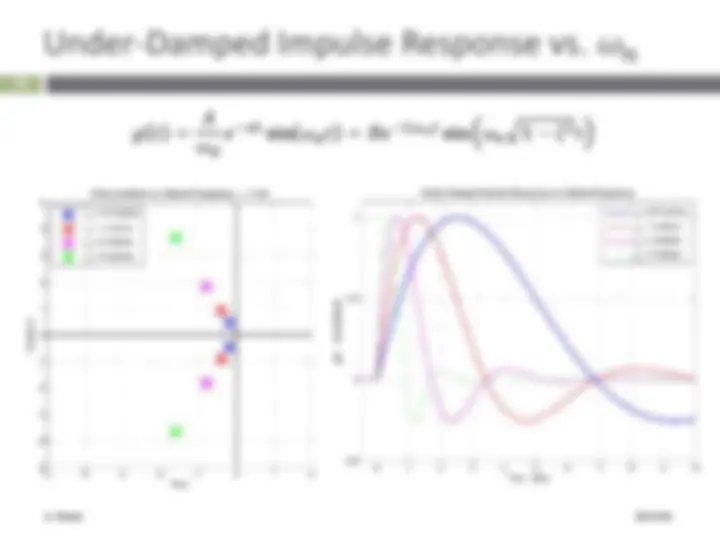
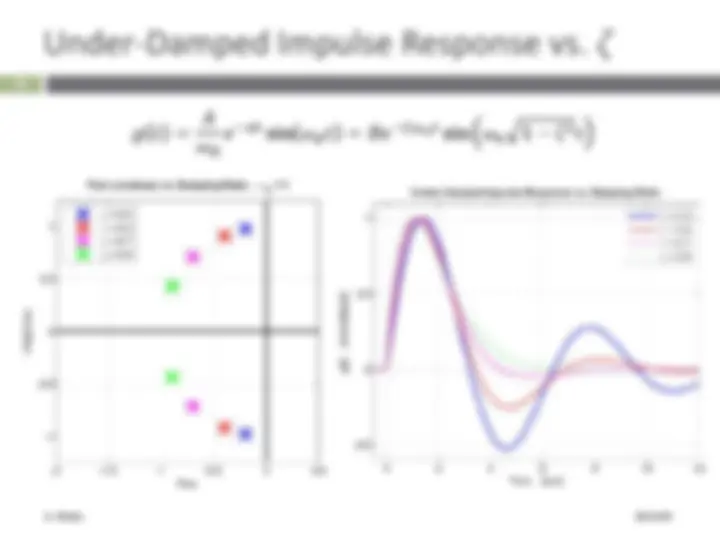
𝑔𝑔 𝑡𝑡 =
𝐴𝐴
𝜔𝜔𝑑𝑑
𝑒𝑒 −𝜎𝜎𝜎𝜎sin(𝜔𝜔𝑑𝑑 𝑡𝑡)
20
Under-Damped Impulse Response vs. 𝜔𝜔𝑛𝑛
𝑒𝑒 −𝜎𝜎𝜎𝜎^ sin 𝜔𝜔𝑑𝑑 𝑡𝑡 = 𝐵𝐵𝑒𝑒 −𝜁𝜁𝜔𝜔𝑛𝑛𝜎𝜎^ sin 𝜔𝜔𝑛𝑛 1 − 𝜁𝜁 2 𝑡𝑡