


Greg Grudic Intro AI 1
Support Vector Machine (SVM)
Classification
Greg Grudic









Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Material Type: Notes; Professor: Grudic; Class: Introduction to Artificial Intelligence; Subject: Computer Science; University: University of Colorado - Boulder; Term: Unknown 1989;
Typology: Study notes
1 / 31

This page cannot be seen from the preview
Don't miss anything!
Greg Grudic
Intro AI^
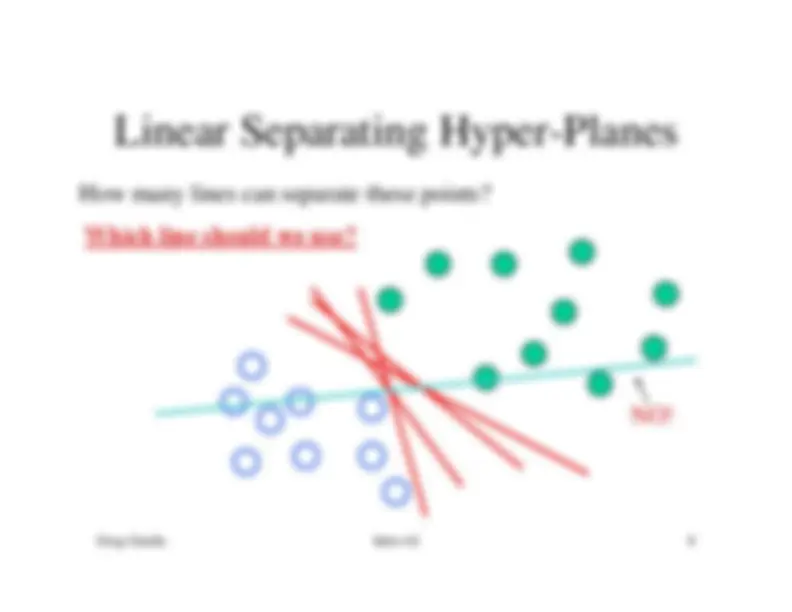
-^ Linear separating hyperplanes for binaryclassification •^ Rosenblatt’s Perceptron Algorithm^ –^ Based on Gradient Descent^ –^ Convergence theoretically guaranteed if data is linearlyseparable -^ Infinite number of solutions -^ For nonlinear data:^ –^ Mapping data into a nonlinear space where it is linearlyseparable (or almost)^ –^ However, convergence still not guaranteed… Greg Grudic
Intro AI^
Greg Grudic
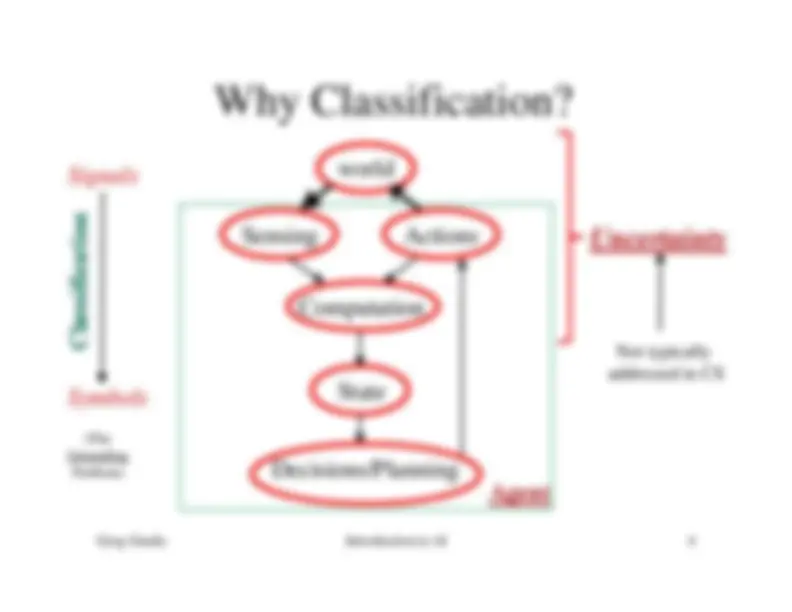
Introduction to AI world Sensing
Actions Computation^ State Decisions/Planning
Agent
Signals Symbols^ (The Grounding^ Problem)
Not typically addressed in CS
Image 1: Poly Mahalanobis
9/24/^
Intro AI^ Image 1
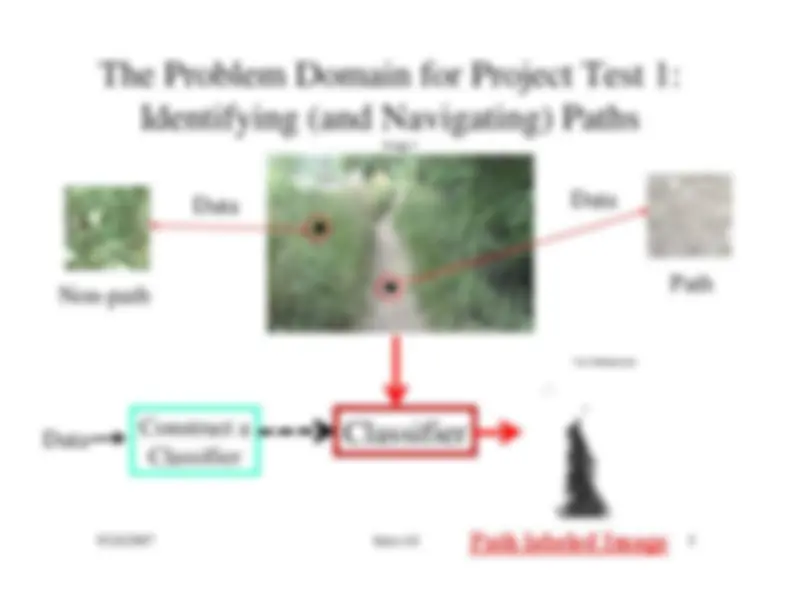
The Problem Domain for Project Test 1:Identifying (and Navigating) Paths Non-path^
Path
Data^
Data
Data^
Construct a^ Classifier
Path labeled Image Classifier
Greg Grudic
Intro AI^
Support Vector Machine (SVM)
Classification
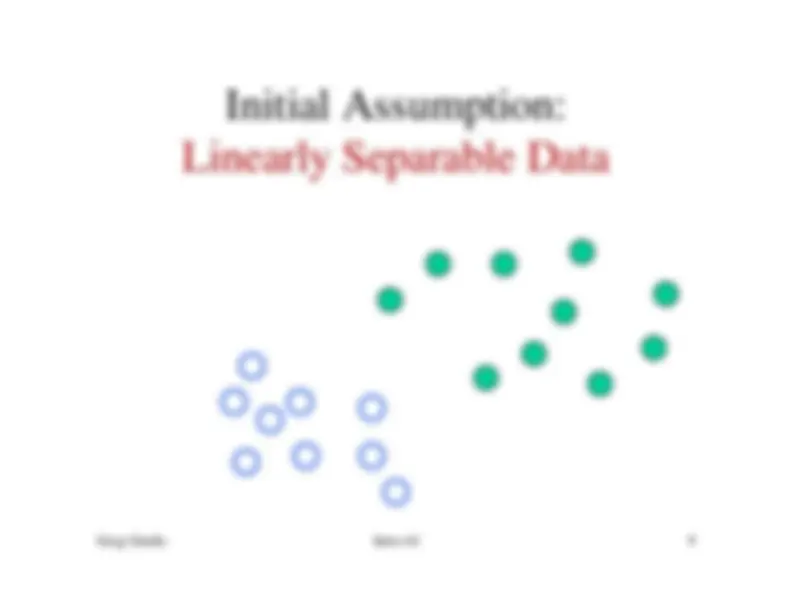
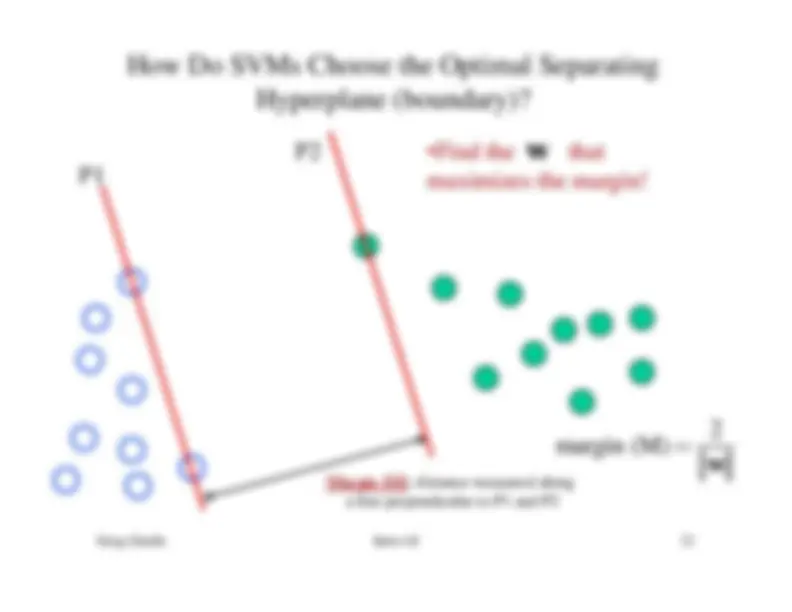
-^ Classification as a problem of findingoptimal (canonical) linear hyperplanes. •^ Optimal Linear Separating Hyperplanes:^ –^ In Input Space^ –^ In Kernel Space -^ Can be non-linear
Greg Grudic
Intro AI^
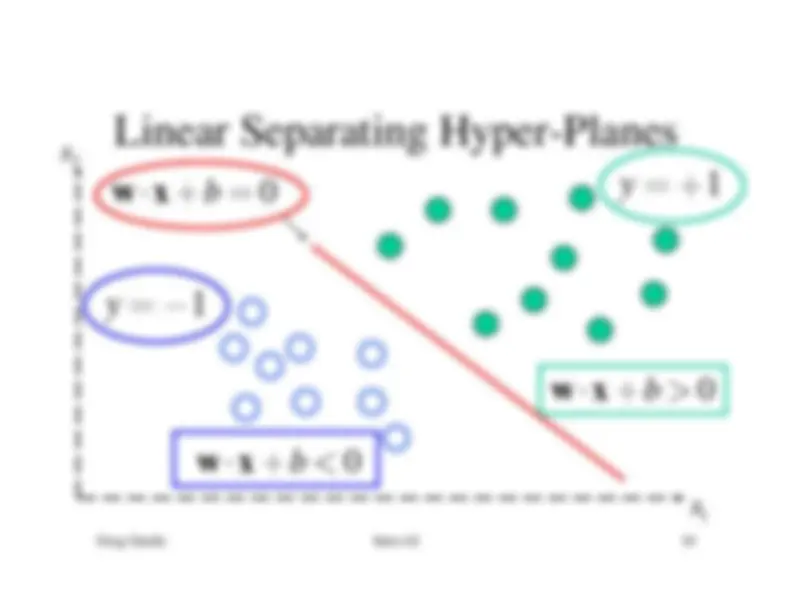
Which line should we use?
Greg Grudic
Intro AI^
10
(^0) b w x ⋅^ +
<
(^0) b w x ⋅^ +
(^0) b w x ⋅^ +
= 1 y^ = −
y^ = +
Greg Grudic
Intro AI^
(^ 1,...,^ ,^ find)
and
such that 1 if^
1 if^
i^
i i^
i
i^
b b^
y b^
w y ∀ ∈ w x ⋅^ + w x
(^
)^ (^
)
N
x ( )
i^
i
Greg Grudic
Intro AI^
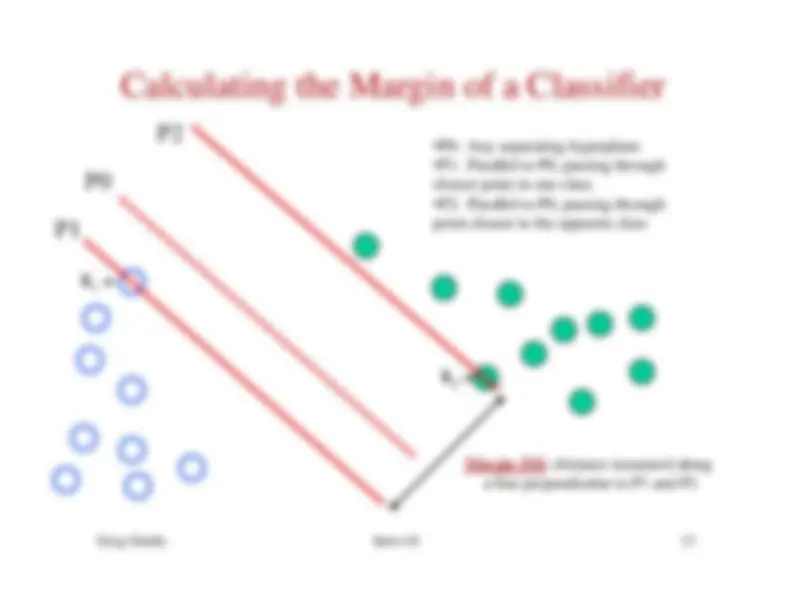
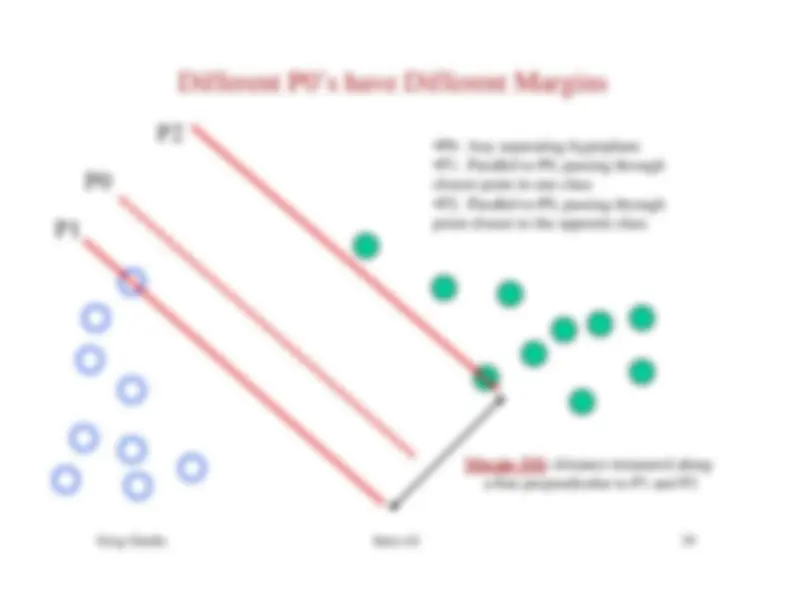
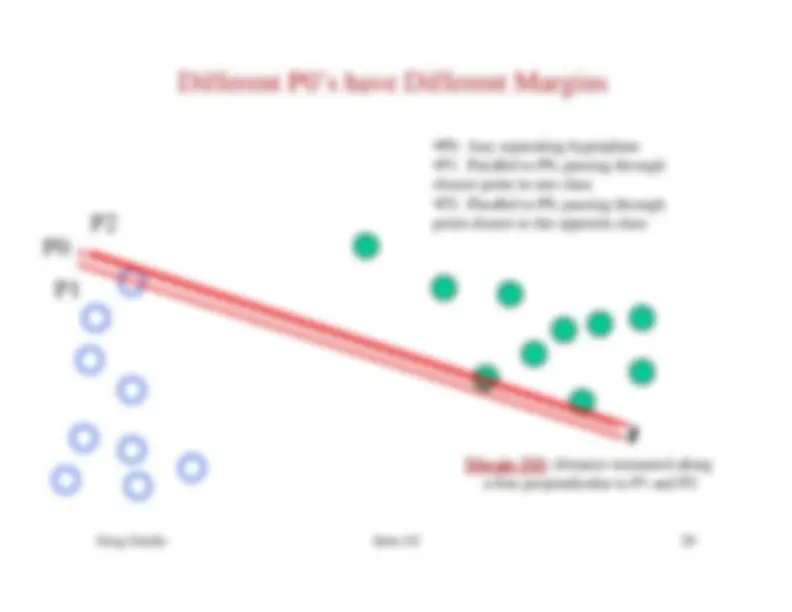
Calculating the Margin of a Classifier^ P2 P0 P
: distance measured along a line perpendicular to P1 and P
x^1
x^2
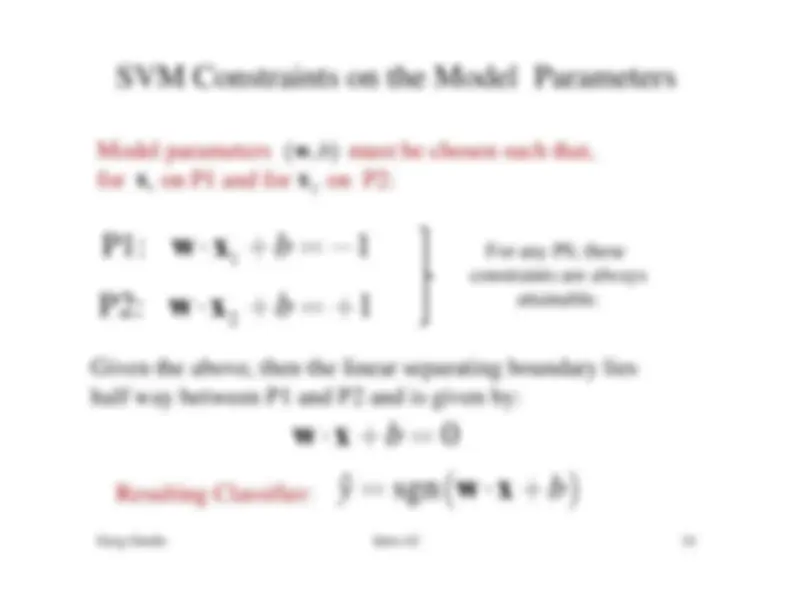
Model parameters
must be chosen such that,
for^ on P1 and for
on P2:
SVM Constraints on the Model Parameters Greg Grudic^
Intro AI^ , b w ( ) 1
P1:^
1 b w x ⋅^
+^ = − 2 P2:^
1 b w x ⋅^
+^ = +
For any P0, these constraints are always^ attainable.
Given the above, then the linear separating boundary lies half way between P1 and P2 and is given by:
(^0) b w x ⋅^ +
=^ (
)
ˆ^ sgn y^
b w x =^
⋅^ +
x^^1 Resulting Classifier:
x^2
Intro AI^ (^
) (^
) (^
) (^
)
2 2
1 1
1 1
2 1
Intro AI^
Take absolute value to get the unsigned margin:
Signed Distance
(^ )^
(^ ) (^
)
2
1
2
1 2
1
2 1
1
(^1 )
1
1,^
2, Therefore:
1
1
2
Therefore:
2 1
2 (
1)^2
(0)^2 b^
b
M^ d P
d P b
b b
b
M
w x^
w x
x^
x^
w^
w
w x^
w x^
w x^ w x
w^
w w x^
w x w^
w^
w^
w
⋅^ +^ +
⋅^
+^ −
=^
=^
=^
=
⋅^ +^ +
⋅^
+^ −=
⇒^ ⋅^
=^ ⋅^ −
⋅^ −^ +
+^ −
+^ ⋅^
+^ +^
−^ +^
−
=^
=^
=^
=
Greg Grudic
Intro AI^
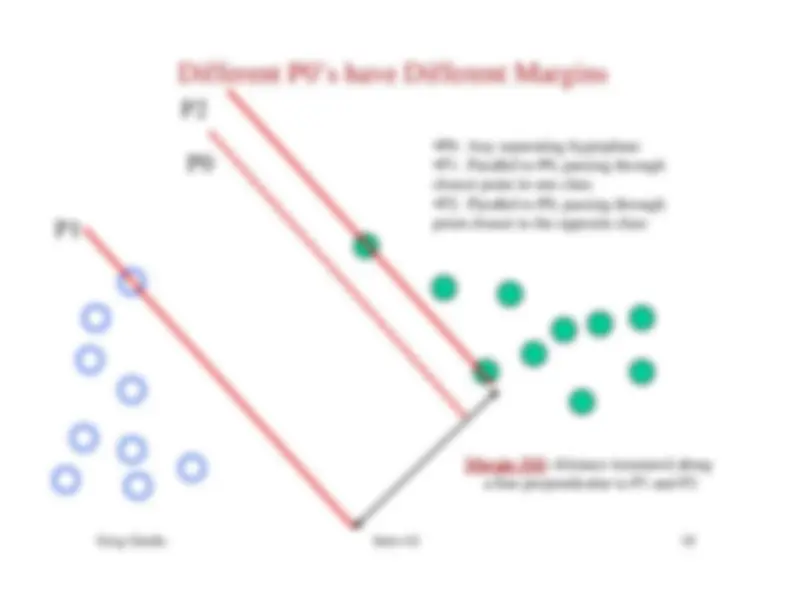
: distance measured along a line perpendicular to P1 and P
Greg Grudic
Intro AI^
: distance measured along a line perpendicular to P1 and P