Download Synchronization Problems and Deadlock and more Lecture notes Operating Systems in PDF only on Docsity!
Synchronization Problems
and Deadlock
CS61, Lecture 20
Prof. Stephen Chong
November 10, 2011
Today
• Race conditions
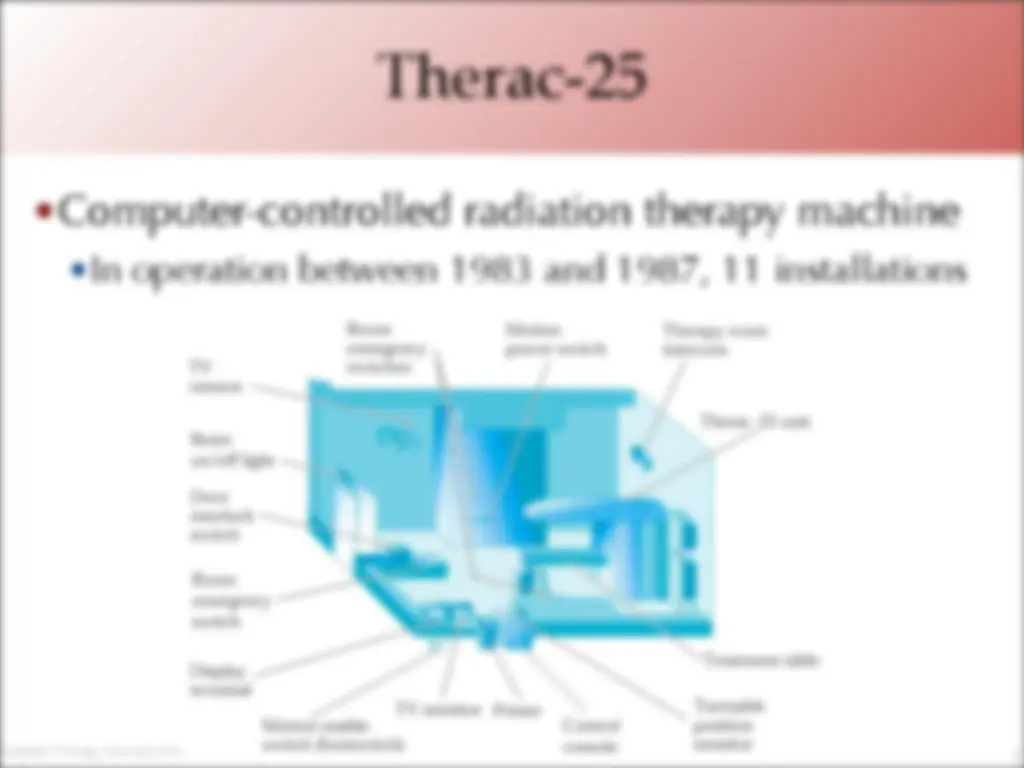
• The THERAC-25 Accidents
• Priority inversion
• Mars Pathfinder
• Deadlock and how to avoid it
Accidents
- Capable of delivering electron and photon (X-Ray) treatments
- “Evolved” from earlier models, Therac-20 and Therac-
- On several occasions between June '85 and Jan '
- Massive overdoses to six people, some lethal
- Several overdoses delivered energy of 15,000 – 20,000 rads
- Typical therapeutic doses in the 200 rad range
- Various lawsuits, all settled out of court
- Initially, manufacturer claimed that overdoses were impossible
- Many issues with the Therac-
- Software design methodology
- Software/hardware engineering
- User interface
- Concurrency
Therac-25 operation
- A turntable aperture that moves certain elements into the path of the beam
- Field light mode used to position beam on patient
- No electron beam expected, instead, a light simulates the beam
position
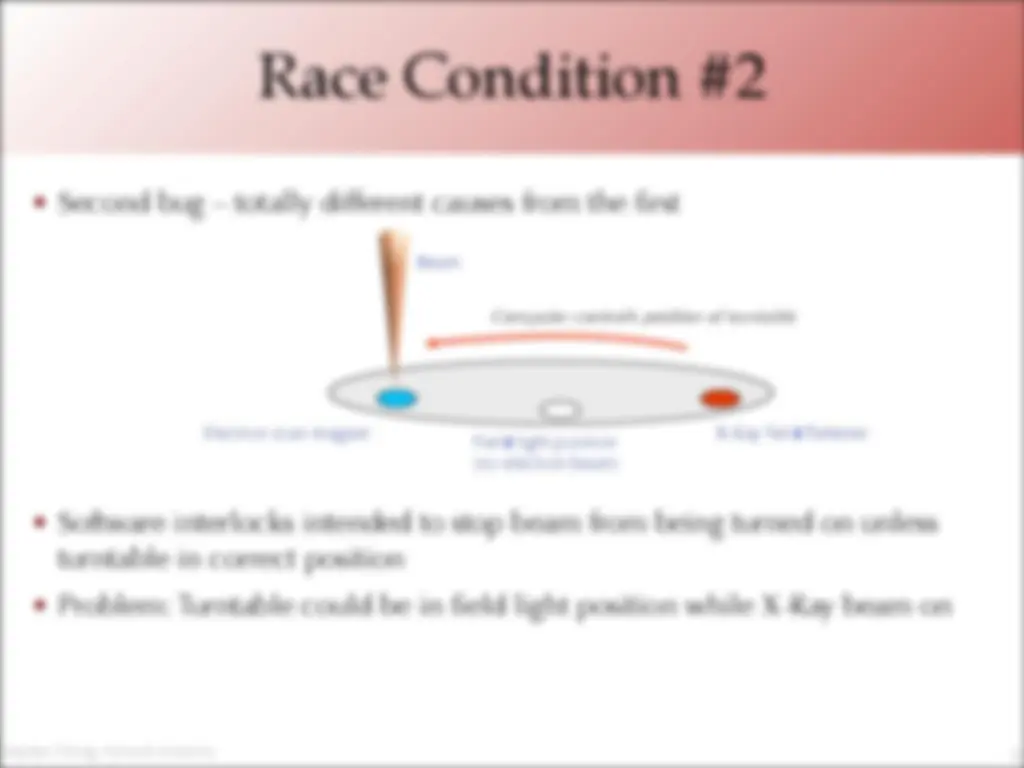
- Electron scan magnet and X-Ray field flattener used to attentuate and
spread electron and X-Ray beams
Electron scan magnet Field light position (no electron beam) X-Ray field flattener Beam Computer controls position of turntable
Stephen Chong, Harvard University
Therac-25 internals
- 4 components: scheduler, critical and non-critical tasks, interrupt services, and stored data - Preemptive scheduler schedules critical and non-critical tasks
- Critical tasks include:
- Treatment task
- Directs and monitors patient setup and treatment
- Interacts with keyboard and terminal interrupt services
- Servo task
- Controls gun emission, dose rate, turntable, and other machine motions
- Concurrent access to shared memory with no synchronization
- Test and set are not atomic
- Race conditions resulting from this play an important part in the accidents 7
Race Condition
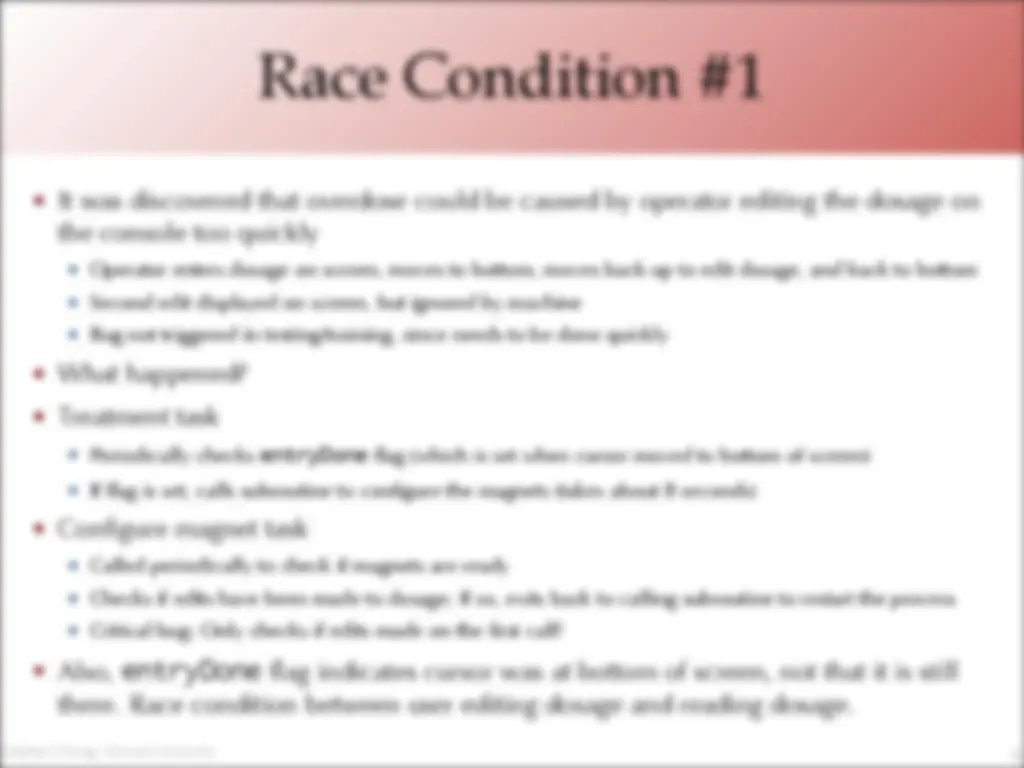
- It was discovered that overdose could be caused by operator editing the dosage on the console too quickly - Operator enters dosage on screen, moves to bottom, moves back up to edit dosage, and back to bottom - Second edit displayed on screen, but ignored by machine - Bug not triggered in testing/training, since needs to be done quickly
- What happened?
- Treatment task
- (^) Periodically checks entryDone flag (which is set when cursor moved to bottom of screen)
- If flag is set, calls subroutine to configure the magnets (takes about 8 seconds)
- Configure magnet task
- Called periodically to check if magnets are ready
- Checks if edits have been made to dosage; If so, exits back to calling subroutine to restart the process
- Critical bug: Only checks if edits made on the first call!
- (^) Also, entryDone flag indicates cursor was at bottom of screen, not that it is still there. Race condition between user editing dosage and reading dosage.
Race Condition
- (^) Dosage entered on console; Operator then presses SET button to set turntable to correct position
- Software interlock:
- (^) Shared variable Class3 indicates whether machine configuration consistent with dosage: zero == OK, non-zero == inconsistent
- (^) Shared variable Fmal indicates whether a malfunction exists
- Set up test task runs after dosage entered, and periodically checks if machine configured consistently with dosage - Increments variable “Class3” on each iteration - Will be run many times - If position correct and no malfunctions (Fmal == 0), sets “Class3 := 0”
- (^) When SET button is pressed, Housekeeping task runs
- If Class3 != 0 check whether turntable in place (set a bit of Fmal)
- Skip check if Class3 == 0.
- Can you spot the bug?
Race Condition
- (^) The bug: Class3 variable is 8 bits wide
- After 256 iterations of “set up test” routine, overflows and becomes zero!
- (^) So if operator presses SET button during short interval that Class
overflows, does not check turntable position
- (^) Fix: Set Class3 to some nonzero value, rather than incrementing it - (^) Why was this done? Probably because inc instruction was easy enough...
VxWorks Operating System
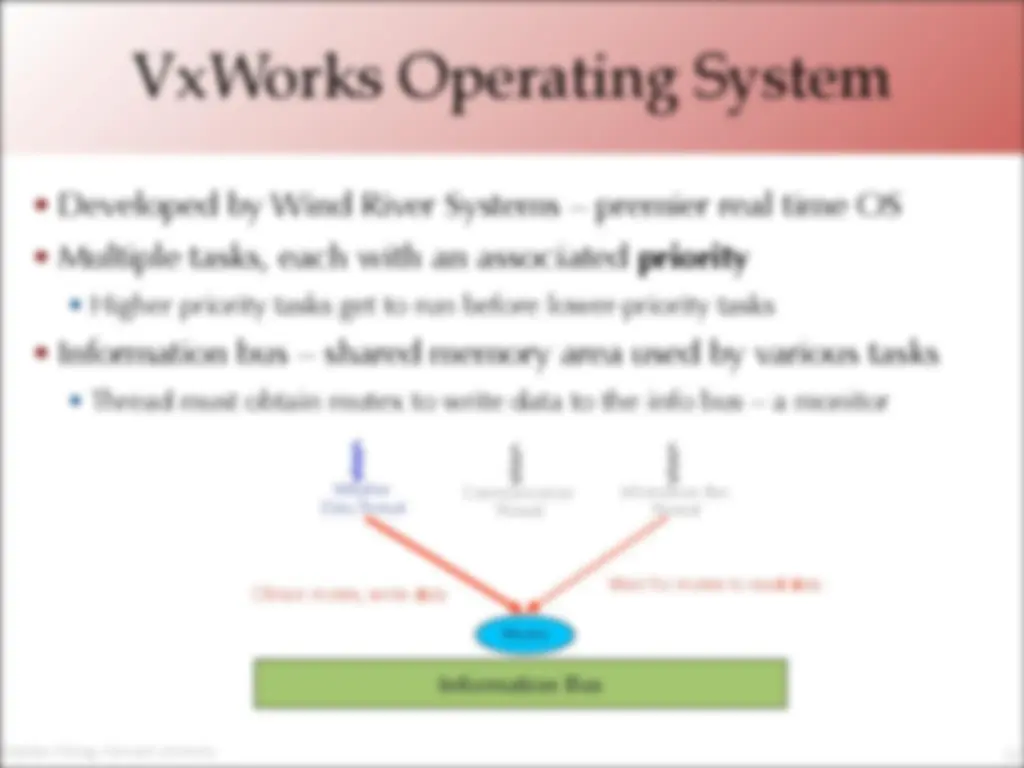
- Developed by Wind River Systems – premier real time OS
- Multiple tasks, each with an associated priority
- Higher priority tasks get to run before lower-priority tasks
- Information bus – shared memory area used by various tasks
- Thread must obtain mutex to write data to the info bus – a monitor Information Bus Mutex Weather Data Thread Communication Thread Information Bus Thread Obtain mutex; write data Wait for mutex to read data
VxWorks Operating System
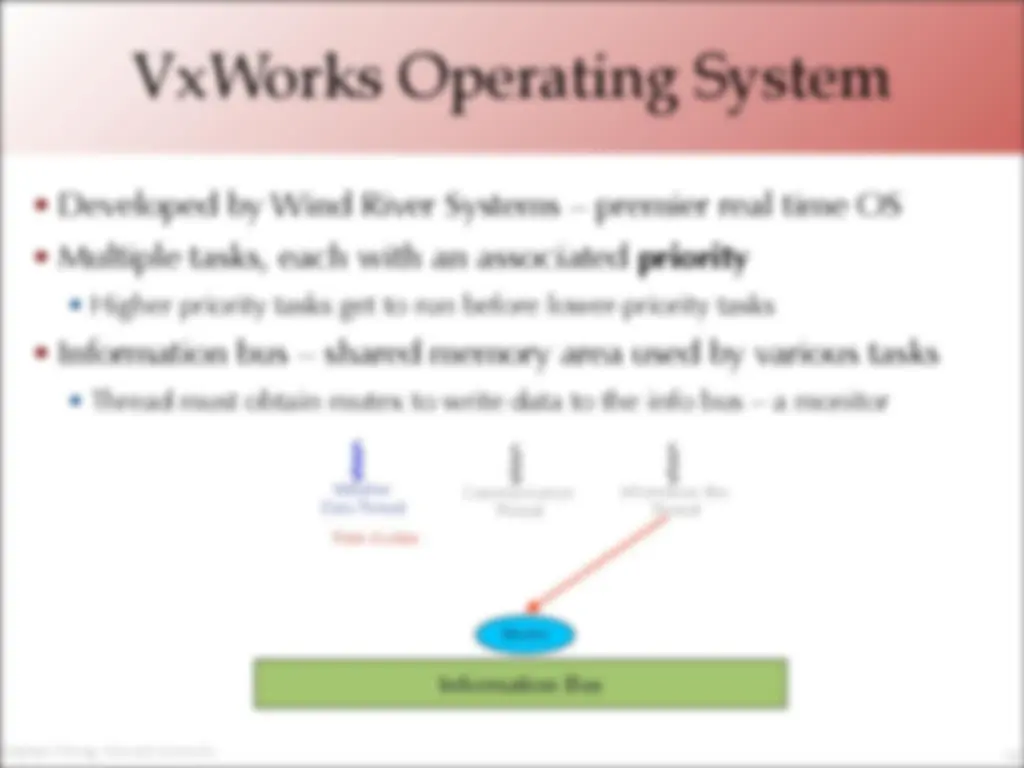
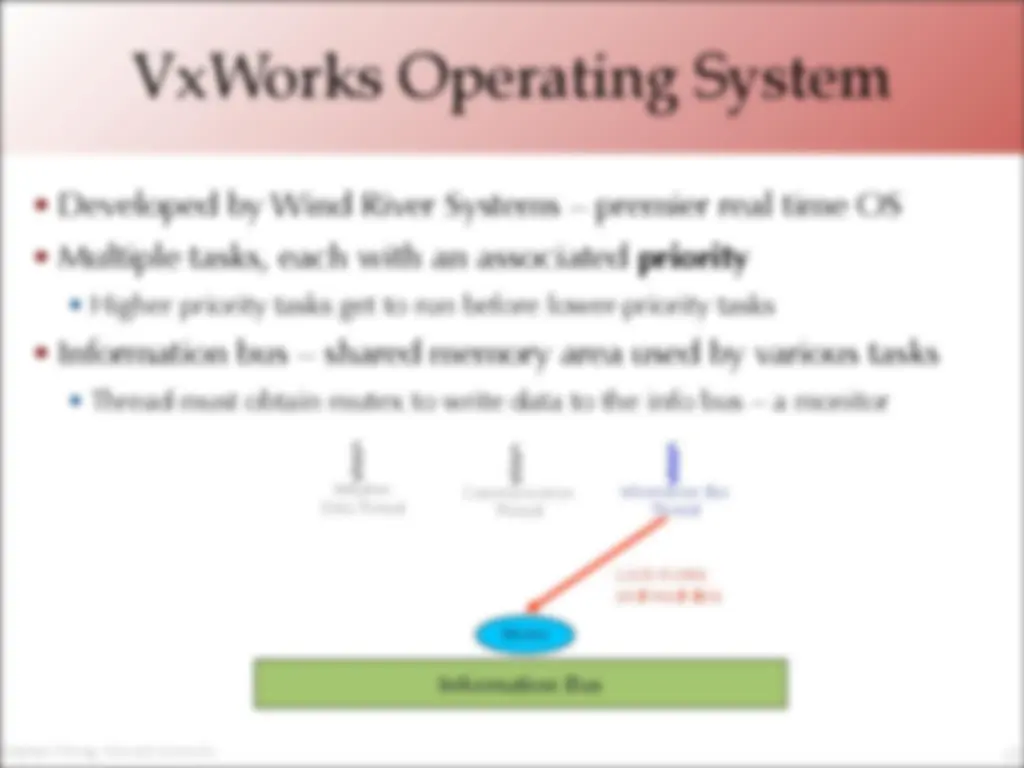
- Developed by Wind River Systems – premier real time OS
- Multiple tasks, each with an associated priority
- Higher priority tasks get to run before lower-priority tasks
- Information bus – shared memory area used by various tasks
- Thread must obtain mutex to write data to the info bus – a monitor Information Bus Mutex Weather Data Thread Communication Thread Information Bus Thread Free mutex
- What happens when threads have different priorities?
- Suppose the low priority thread has the mutex, and medium priority thread needs the CPU - Medium thread has higher priority than Low thread, so gets the CPU. Runs for a long time. - But High thread waiting for Low thread to finish! Medium thread running instead of High!
- This is called priority inversion
Priority inversion
Weather Data Thread Communication Thread Information Bus Thread Information Bus Mutex Weather Data Thread Communication Thread Low priority Medium priority High priority Communication Thread
How to fix priority inversion?
- Priority inversion:
- A high priority thread is waiting for a low priority thread to finish (this is OK)
- Medium priority thread comes along and preempts Low thread
- Now Medium thread running instead of finishing Low thread
- General solution: Priority inheritance
- If high priority thread is waiting for a low priority thread, temporarily give low
thread high priority
- High priority thread “donates” its priority to the low priority thread
- Why does this fix the problem?
- Weather task inherits high priority while it is being waited on
- Now medium priority communications task cannot preempt weather task
Today
• Race conditions
• The THERAC-25 Accidents
• Priority inversion
• Mars Pathfinder
• Deadlock and how to avoid it
Deadlock
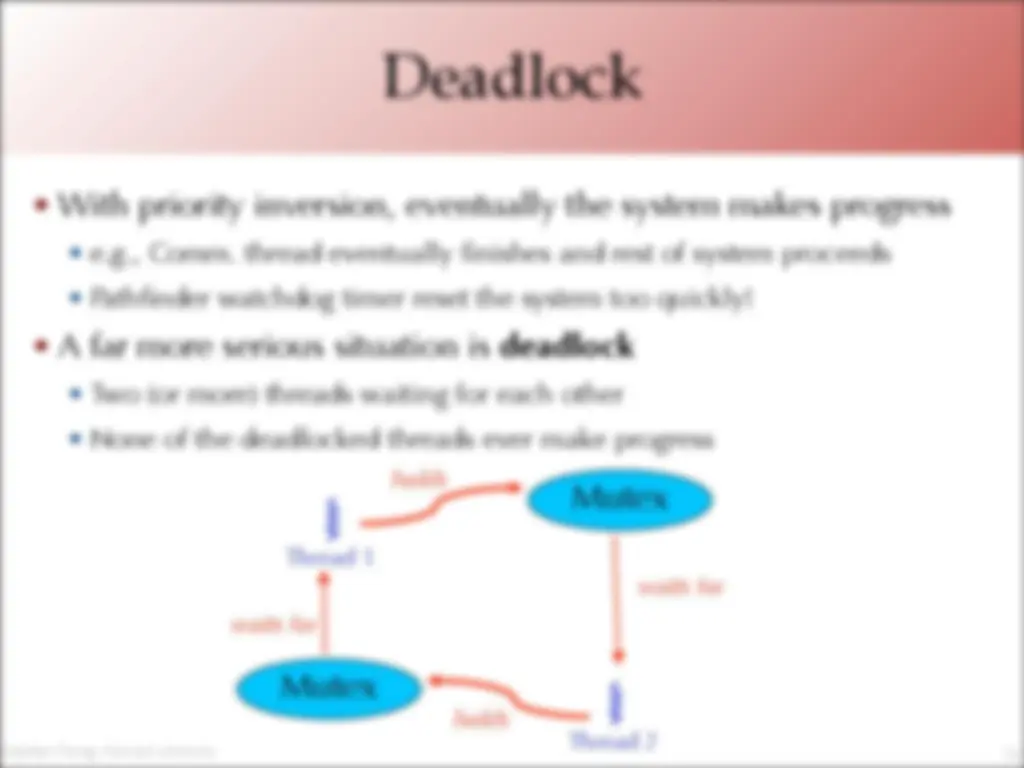
- With priority inversion, eventually the system makes progress
- e.g., Comm. thread eventually finishes and rest of system proceeds
- Pathfinder watchdog timer reset the system too quickly!
- A far more serious situation is deadlock
- Two (or more) threads waiting for each other
- None of the deadlocked threads ever make progress
Mutex
Thread 1 holds
Mutex
Thread 2 holds waits for waits for