



Synchronous Motor



































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A synchronous electric motor is an AC motor in which, at steady state, the rotation of the shaft is synchronized with the frequency of the supply current; the rotation period is exactly equal to an integral number of AC cycles
Typology: Study notes
1 / 48

This page cannot be seen from the preview
Don't miss anything!
S
General Starting Procedure:
Procedure for Starting a Synchronous Motor
Using the Damper WindingUsing the Damper Winding
In a synchronous machine, a back emf
E
b
(as like DC motor) is set up in the armature
a sy c
o ous
ac
e, a bac
e
b
(as
e
C
o o ) s se up
e a
a u e
(stator) by the rotor flux which opposes the applied voltage
V
.
This back emf depends on rotor excitation only (and not on speed as in DC motors).The net voltage in armature (stator) is the
vector difference
(not arithmetical, as in DC
motors) of
V
and
E
b .
Armature current is obtained by dividing this
vector
difference of voltages by
Armature current is obtained by dividing this
vector
difference of voltages by
armature impedance (not resistance as in DC machines). Fig. 36.
shows the condition when the motor (properly synchronized to the supply) is
running on
no
load
and has
no
losses
and is having fixed excitation which makes
running on
no
-load
and
has
no losses
and
is
having
fixed
excitation
which
makes
E
b
=V
.
It is seen that vector difference of
E
b
and
V
is zero
and so is the armature current.Motor intake is zero, as there is neither load nor
,
losses to be met by it.In other words, the motor just floats.
36.
(a)
shows
the
equivalent
circuit model for one armature phaseof
a
cylindrical
rotor
synchronous
It is seen from
Fig. 36.9(b)
that the
phase applied voltage
V
is the vector sum
of reversed back emf
i.e.
E
b
and the
of
a
cylindrical
rotor
synchronous
motor.
b
impedance drop
I
a
Z
. s
In other words,
V
=
(
-
E
b
+
I
a
Z
). s
The angle
α
between the phasor for
V
and
E
b
is called the
load angle
or
power
angle
of the synchronous motor.
Let
R
a
= armature resistance/phase;
e
a
a
a u e es s a ce/p ase;
X
S
= synchronous reactance/phase
Then,
Z
S
=
R
a +jX
S
;
Hence, the power available at the shaftwould
be
less
than
the
developed
power by this amount.
S
b
R S
a
Z
E
V
E Z
I
=
=
b
Z
I
E
V
Obviously
Out of the input power/phase
VI
a
cos
φ
,
and
amount
I
a
2 R
a
is
wasted
in
armature,
the
rest
(
VI
a cos
φ
I
a
2 R
a
)
S
a
b
Z
I
E
V
−
=
Obviously
,
The angle
θ
(known as
internal angle
) by
which
I
a
lags
behind
E
R
is
given
by
θ
/
f
i^
li ibl
h
θ
90
a
a
a
appears as mechanical power in rotor;out of it, iron, friction and excitationlosses are meet and the rest is available
tan
θ
=
X
S /R
a
. If
R
a
is negligible, then
θ
=
o .
Motor input =
VI
a cos
φ
-per phase, here
V
is
applied voltage/phase.
at the shaft.If power input/phase of the motor is
P
then:
P=P
m
+ I
a 2
R
a
.
pp
g
p
Total input for a star-connected 3-phasemachine is,
P=
3
V
L
I
L
cos
φ
m
a
a
Or mechanical power in rotor
P
m
=P-
I
a
2 R
a
-per phase
The mechanical power developed, somewould go to meet iron and fraction andexcitation losses.
For
three
phases
P
m
=
3
V
L
I
L
cos
φ
-
3
I
a
2 R
a
.
The
armature
resistance
of
a
synchronous
motor
is
negligible
as
compared
to
its
The
armature
resistance
of
a
synchronous
motor
is
negligible
as
compared
to
its
synchronous reactance.Hence the equivalent circuit for the motor becomes as shown in
Fig. 36.
(a).
From the phasor diagram of
Fig. 36.10(b)
, it
is seen that
φ
=
=
cos
sin
S X a I b E
AB
sin
cos
Or,
V b E S X a
VI
= φ
Now,
VI
a cos
φ
= motor power input/phase
phase
per
sin
−
=
∴
α
S X
V b E
in P
phase
three
for
sin
3
−
=
∴
α
S X
V b E
in P
Since
Stator
Cu
losses
have
been
neglected
P
also
3
V
E
Since
Stator
Cu
losses
have
been
neglected
,^
P
in
also
represents
the
gross
mechanical
power
( P
m
)
developed by the motor.
α
sin
3
S X
V b E
in P
m P
=
=
∴
The gross torque developed by the motor is
N
m
N
in rpm
The
gross torque developed by the motor is
g
m
S
N
-m
N
S
in
rpm.
m
N
sin
(^65).
28
sin
3
(^55). 9
(^55). 9
− = × = = ∴
S X S N
V b E S X S N
V b E
S N
m P
g T
Example 38.
A 75 kW, 3-phase, Y-connected, 50 Hz, 440 V cylindrical rotor
synchronous motor operates at rated condition with 0.8 power factor leading. Themotor efficiency excluding field and stator losses, is 95% and
XS
=2.5 ohm. Calculate:
o o
e
c e cy e c ud
g
e d a d s a o
osses, s 95% a d
S
.5 o
. Ca cu a e:
(
i ) mechanical power developed, (
ii
) armature current, (
iii
) back emf, (
iv
) power angle,
and (
v
) maximum or pull-out torque of the motor.
S l
i^
N
120 50/
1500
25
S
olution
: N
S
= 120
×
50/
= 1500 rpm = 25 rps.
W
(^950) ,
78
(^95). 0 /
103
75
/
) (
=
×
=
=
=
out P
m P
in P
i (ii) Si
i^
t i
k
k
th t
(ii)
Since power input is known, we know that
A
129
(^8). 0
440
3
(^950) ,
78
W;
(^950) ,
78
(^8). 0
440
3
cos
3
= × × = = × × × = φ ∴
a I a I a I L V
(iii) A
li d
l
/ h
2 4
440
3
2 4
∠
0
h
i
i^
36 11
(iii)
Applied voltage/phase=
254
440
3
=
×
Let V= 254
∠
0
o as shown in
Fig. 36.11.
° = − = φ + = (^9).
36
) (^8). 0 ( 1
cos
and
Now,
S
jIX
b E
V
° − ∠ = ° ∠ × ° ∠ − ° ∠ = − =
30
516
90
(^5). 2
(^9).
36
129
0
254
or,
S
j IX
V
b E
S
j
b
°
∴
30
,
angle
Power
(iv)
(v) Maximum or Full-out torque occurs when
α
=
o .
W
(^8).
(^276) ,
157
90
sin
(^5). 2
516
254
3
sin
3
(max)
= ° × × = =
S X
V b E
m P
∴
Pull-out torque=9.
×
157,276.8/1500=1001.328 N-m
b
φ − θ + φ − θ − = + =
2 )]
sin(
[
2 )]
cos(
[
2
2
2
R E
R E
V
BC
AB
AC
φ − θ
−
−
φ − θ + φ − θ − = =
)
sin(
1
tan
1
tan
2 )]
sin(
[
2 )]
cos(
[
S Z a I
BC
S Z a I S Z a I V
AC
b
a R
s
X 1
tan
−
=
θ
b
R
=
E
V
E
φ − θ − = =
)
cos(
tan
tan
S Z a I
V
AB
)
cos(
2
2
2
−
=
R
VE
R E V b E )
sin
]
cos
[
)]
o
180
sin(
)
o
180
[cos(
) o 0
sin
o 0
(cos
b jE
b E
V
R
j b E j V R
b
R
−
=
− + − + + =
E E
R
b
α
sin
:
is
and
between
Angle
b E
V
R
E
α
α
φ
θ
cos sin
1
tan
b E
V
b E −
−
=
2
2
⎞⎟ ⎟ ⎠
⎛⎜ ⎜ ⎝
φ − θ − ° − φ − θ − ° − =
φ + θ − ° + φ + θ − ° + =
)}
(
180
cos{
)}
(
180
sin{
1
tan
2
)}]
(
180
sin{
[
2
)}]
(
180
cos{
[
S Z a I
V
S Z a I
S Z a I S Z a I V b
Where,
α
=load angle
⎠
⎝
⎞
⎛^ ⎜
φ
θ
−
=
φ + θ + φ + θ − =
)
sin(
1
tan
2 )]
sin(
[
2 )]
cos(
[
S Z a I
S Z a I S Z a I V b
⎠
⎜ ⎜ ⎝^
φ
θ
−
=
)
cos(
tan
S Z a I
V
S
)
cos(
2
2
2
−
=
R
VE
R E
V
b E
)]
o
180
sin(
)
o
180
[cos(
) o 0
sin
o 0
(cos
j b E j V R
b
R
− + − + + =
=
E
E
V
E
)
sin
]
cos
[
)]
(
)
[
(
)
(
b jE
b E
V
R
j
b
j
R
−
=
E
:
angle
factor
Power
a R
s
X 1
tan
g
−
=
θ
o
R
o
)
i
]
[
jE
E
V
E
)
sin
]
cos
[
b jE
b E
V
R
−
=
E
2 )]
sin
[
2 ]
cos
[
) (
Thus,
b E b E V R E a
−
=
V
R E
(^95).
17
2 ]
(^0523). 0
(^110) [
2 ]
(^9986). 0
110
(^127) [^
= × + × − =
i
o (^7).
18
(^9986). 0
110
127
(^0523). 0
110
1
tan
cos sin
1
tan
) (
=
×
−
× − = − − =
b E
V
b E
b
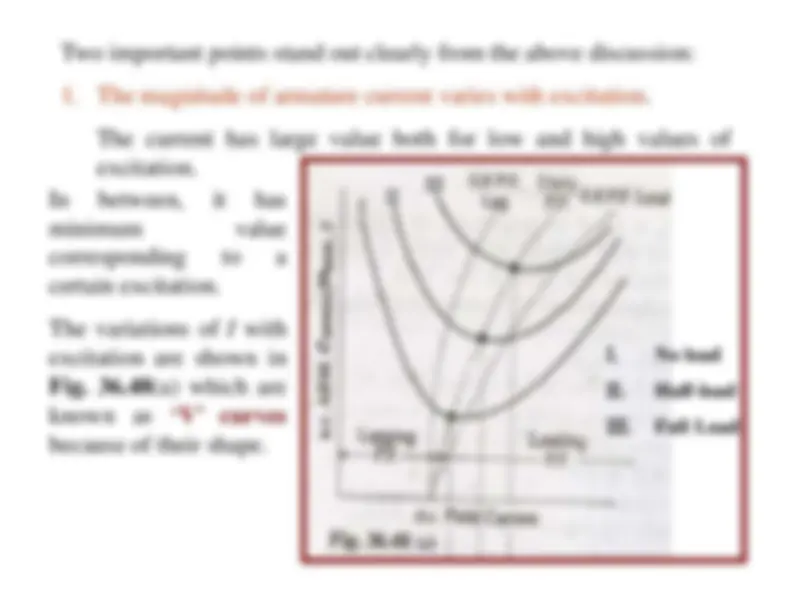
Effect of Increased Load with Constant Excitation
The effect of increased load on a synchronous motor will be studied under
diti
f
l
d
d
it ti
(i
i
th
ff
t^
f
t
conditions of normal, under and over-excitation (ignoring the effects of armaturereaction).With
normal-excitation,
E
b
=
V
,^
with
under-excitation,
E
b
V
. The value of excitation would be kept
constant
.
R
a
is considered negligible as compared to
X
S
so that phase angle between
E
R
and
I
a
i .e
.^
θ
=
o
.
i.e.
θ
Normal Excitation, (
E
b
=
V
)
Fig. 36.15(a) shows the condition when motoris running with light load so that (a) torqueangle
α
1
is small, (b) so
E
R
1
is small, (c) hence
I
a 1
is small and (d)
φ
1
is small so that cos
φ
1
is
large. Now, suppose that load on the motor is
increased
as shown in Fig. 36.15(b).
,^
pp
g
( )
For meeting this extra load, motor must develop more torque by drawing morearmature current.