


System Design Flow and
Fixed-point Arithmetic
Lecture 3
Dr. Shoab A. Khan



















































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
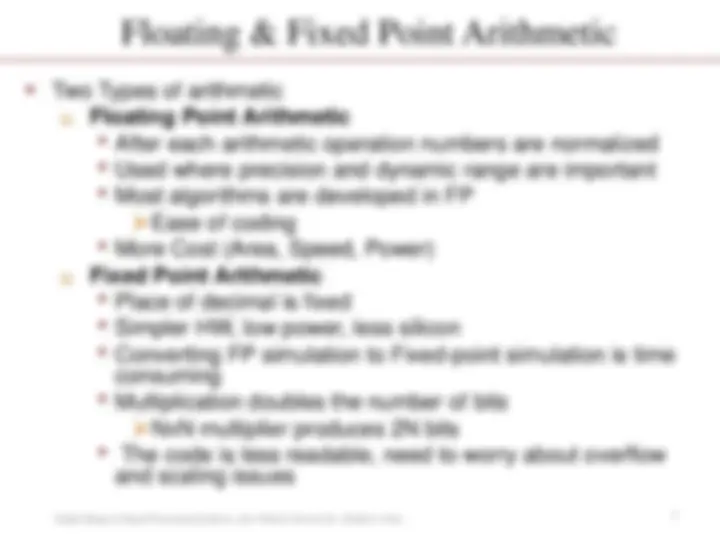
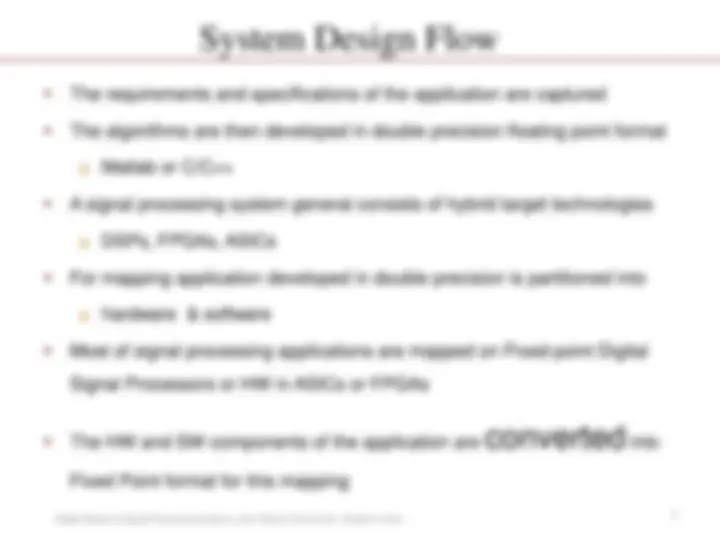
This chapter is titled "System Design Flow and Fixed-point Arithmetic" (Lecture 3) by Dr. Shoab A. Khan. The opening slides introduce the systematic design process and the fundamental trade-offs between floating-point and fixed-point arithmetic in digital systems. They detail how algorithms are initially explored in a high-precision, flexible floating-point environment before being converted to fixed-point format, which offers simpler hardware, lower power consumption, and smaller silicon area at the expense of increased code complexity and bit-growth concerns. Additionally, the slides map out the overall system-level design flow, establishing a progression that begins with capturing requirements and specifications, moves through floating-point algorithmic exploration, and transitions into software-hardware partitioning and fixed-point implementation.
Typology: Slides
1 / 88

This page cannot be seen from the preview
Don't miss anything!
Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
2
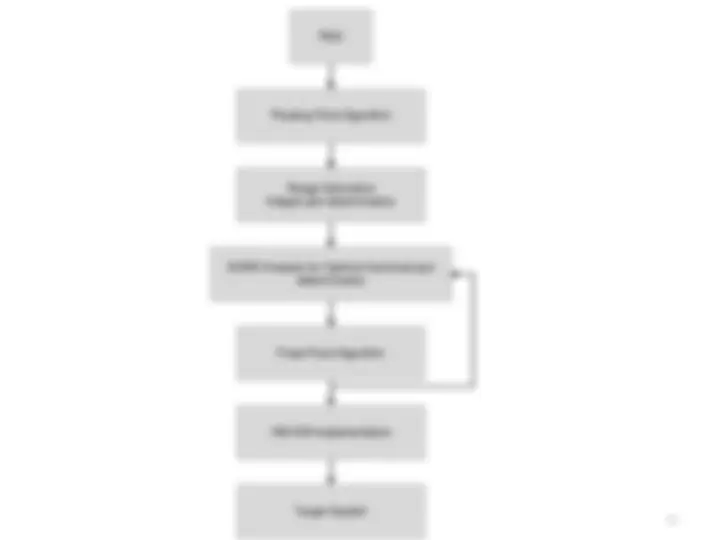
System-level Design Flow and Fixed-point Arithmetic 4 Algorithm exploration and implementation in Floating Point Fixed Point Conversion System Integration Gate Level Net List Functional Verifiction Timing & Functional Verification Fixed Point Implementation S/W S/W H/W S/W or H/W Co-verification S/W or H/W Partition Synthesis RTL Verilog Implementation Requirements and Specifications Layout
5
The HW and SW components of the application are converted into
7 Characteristic Specification Frequency range 420 MHz to 512 MHz Data rate Up to 512 kbps multi-channel non-line of sight Channel Multi-path with 15 μs delay spread and 220 km/h relative speed between transmitter and receiver Modulation OFDM supporting BPSK, QPSK and QAM FEC Turbo codes, convolution, Reed–Solomon Frequency hopping > 600 hops/s, frequency hopping on full hopping band Waveforms Radio works as SDR and should be capable of accepting additional waveforms
Next Step: Algorithm Development and Mapping 8
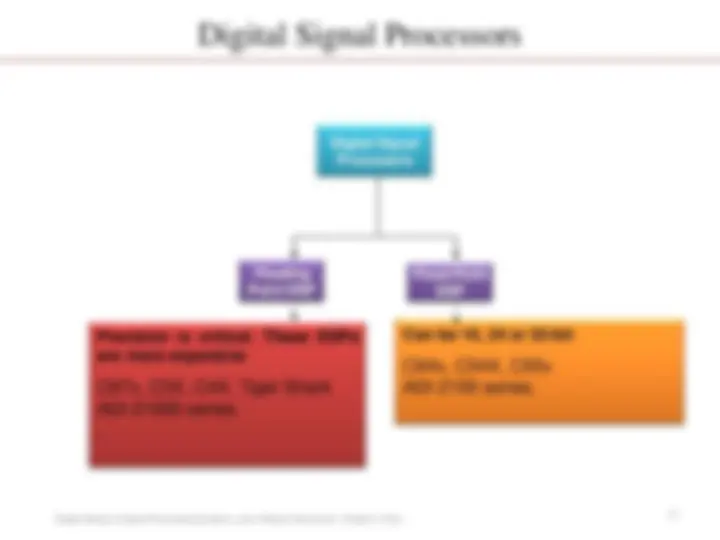
System usually consists of hybrid technologies consisting of ASICs, DSPs, GPP, and FPGAs
10 % BPSK = 1, QPSK = 2, 8PSK = 3, 16QAM = 4 % All-user defined parameters are set in structure USER_PARAMS USER_PARAMS.MOD_SCH = 2; %select QPSK for current simulation USER_PARAMS.CHUNK_SZ = 256; %set buffer size USER_PARAMS.NO_CHUNKS = 100;% set no of chunks for simulation % generate raw data for simulation raw_data = randint(1, USER_PARAMS.NO_CHUNKSUSER_PARAMS.CHUNK_SZ) % Initialize user defined, system defined parameters and states PARAMS = MOD_Params_Init(USER_PARAMS); STATES = MOD_States_Init(PARAMS); mod_out = []; % Code should be structured to process data on chunk-by-chunk basis for iter = 0:USER_PARAMS.NO_CHUNKS- 1 in_data = raw_data (iterUSER_PARAMS.CHUNK_SZ+1:USER_PARAMS.CHUNK_SZ*(iter+1)); [out_sig,STATES]= Modulator(in_data,PARAMS,STATES); mod_out = [mod_out out_sig]; end
Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
11 % Initializing the user defined parameters and system design parameters in PARAMS function PARAMS = MOD_Params_Init(USER_PARAMS) % Structure for transmitter parameters PARAMS.MOD_SCH = USER_PARAMS.MOD_SCH; PARAMS.SPS = 4; % Sample per symbol % Create a root raised cosine pulse-shaping filter PARAMS.Nyquist_filter = rcosfir(.5 , 5, PARAMS.SPS, 1); % Bits per symbol, in this case bits per symbols is same as mod scheme PARAMS.BPS = USER_PARAMS.MOD_SCH; % Lookup tables for BPSK, QPSK, 8 - PSK and 16 - QAM using gray coding BPSK_Table = [(-1 + 0j) (1 + 0j)]; QPSK_Table = [(-.707 - .707j) (-.707 + .707j) (. 707 - .707j) (.707 + .707j)]; PSK8_Table = [(1 + 0j) (.7071 + .7071i) (-.7071 + .7071i) (0 + i)... (- 1 + 0i) (-.7071 - .7071i) (.7071 - .7071i) (0 - 1i)]; QAM_Table = [(- 3 + - 3j) (- 3 + - 1j) (- 3 + 3j) (- 3 + 1j) (- 1 + - 3j)... (- 1 + - 1j) (-1 + 3j) (- 1 + 1j) (3 + - 3j) (3 + - 1j)... (3 + 3j) (3 + 1j) (1 + - 3j) (1 + - 1j) (1 + 3j) (1 + 1j)]; % Constellation selection according to bits per symbol if(PARAMS.BPS == 1) PARAMS.const_Table = BPSK_Table; elseif(PARAMS.BPS == 2) PARAMS.const_Table = QPSK_Table; elseif(PARAMS.BPS == 3) PARAMS.const_Table = PSK8_Table; elseif(PARAMS.BPS == 4) PARAMS.const_Table = QAM_Table; else error(‘ERROR!!! This constellation size not supported’) end
Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
13 function [out_data, STATES] = Modulator(in_data, PARAMS, STATES); % Bits to symbols conversion sym = reshape(in_data,PARAMS.BPS,length(in_data)/PARAMS.BPS)’; % Binary to decimal conversion sym_decimal = bi2de(sym); % Bit to symbol mapping const_sym = PARAMS.const_Table(sym_decimal+1); % Zero padding for up-sampling up_sym = upsample(const_sym,PARAMS.SPS); % Zero padded signal passed through Nyquist filter [out_data, STATES.filter_delayline] = filter(PARAMS.Nyquist_filter,1,up_sym, STATES.filter_delayline);
Digital Design of Signal Processing Systems, John Wiley & Sons by Dr. Shoab A. Khan
14
Representation of Numbers 16 In a digital design fixed or floating point numbers are represented in binary format Types of Representation one’s complement sign magnitude canonic sign digit (CSD) two’s complement In digital system design for fixed point implementation the canonic sign digit (CSD), and two’s complement are normally used
17
19 1 0 1 1 (Negative number as MSB = 1) -8 + 2 + 1 = - 2 3 2 1 2 2 2 0
20
4