Lab 01
To study the closed loop analysis of given system (heater and blower)
Objective
System’s response under step input
Procedure
System was analyzed in a closed loop.
Step input of 800mV was applied to the system as a disturbance to the system and
transient response was analysed.
Steady state values at the output of the system were measured before and after the
input was applied.
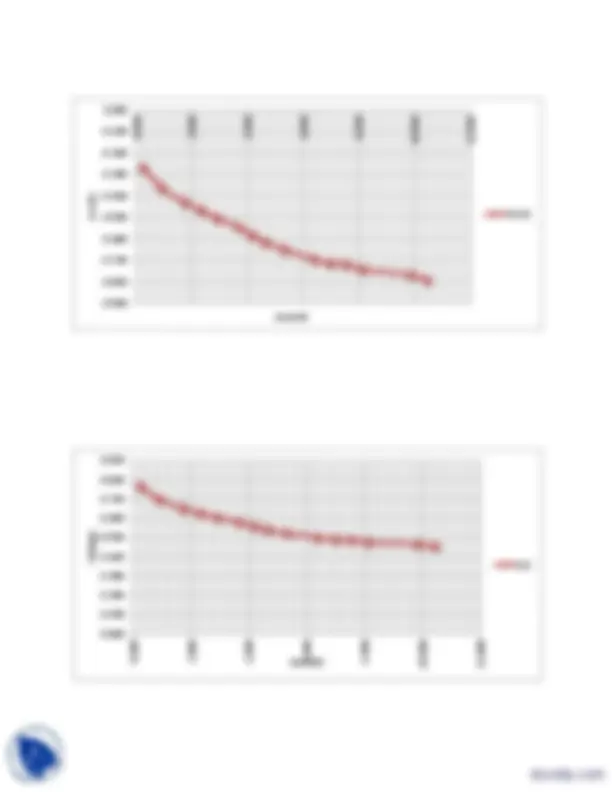
Transient response of the system was obtained on a graph using graph plotter.
Two graphs were obtained one for the positive disturbance and one for the negative
disturbance.
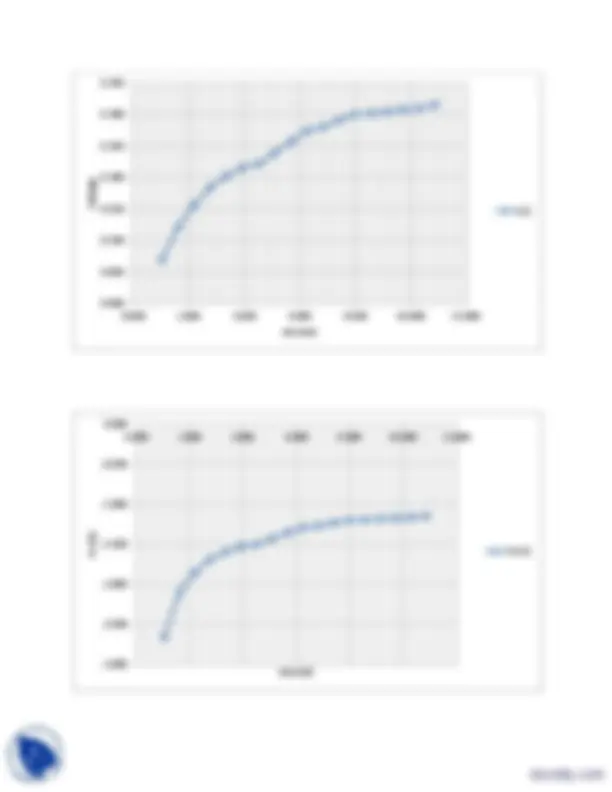
For the case of positive error, new plot of log natural of e(t) was obtained.
Using best fit method, a line was fitted on the curve and its slope and y-intercept was
obtained.
Where slope of the curve gives pole’s location.
Same steps were followed for the negative input of the error.
Using this information transfer function was obtained firstly for the closed loop and
then for the open loop.
Calculations:
Separate calculations were done for the two test inputs i.e positive and negative which are
as follows.
docsity.com