


Tactile Sensing
From Humans to Humanoids
Authors: Allen, Patel, Tandon, Dahiya, Metta, Valle, and Sandini





Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The complex world of human tactile sensing, focusing on the different types of receptors and their functions. The authors also discuss the importance of tactile sensors in robotics and the various types and materials used in their production. valuable insights into the field of tactile sensing, its applications, and the challenges in creating advanced tactile sensors.
Typology: Exercises
1 / 16

This page cannot be seen from the preview
Don't miss anything!
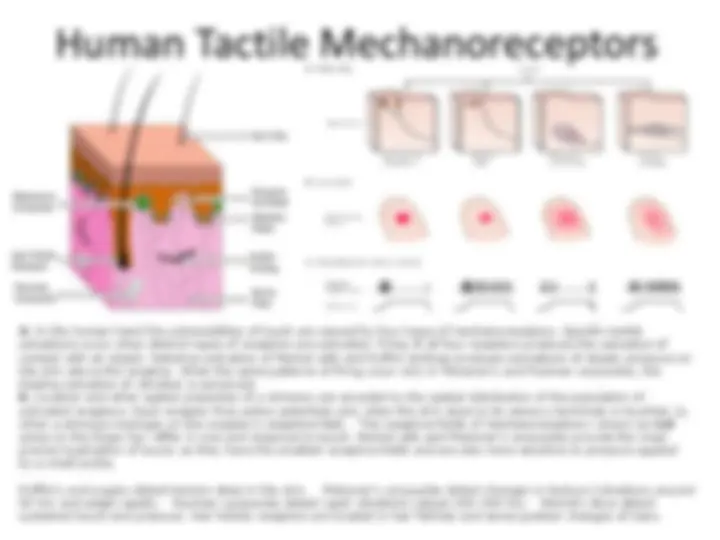
Human Tactile Sensing
Human Tactile Mechanoreceptors A. In the human hand the submodalities of touch are sensed by four types of mechanoreceptors. Specific tactile sensations occur when distinct types of receptors are activated. Firing of all four receptors produces the sensation of contact with an object. Selective activation of Merkel cells and Ruffini endings produces sensations of steady pressure on the skin above the receptor. When the same patterns of firing occur only in Meissner's and Pacinian corpuscles, the tingling sensation of vibration is perceived. B. Location and other spatial properties of a stimulus are encoded by the spatial distribution of the population of activated receptors. Each receptor fires action potentials only when the skin close to its sensory terminals is touched, ie, when a stimulus impinges on the receptor's receptive field. The receptive fields of mechanoreceptors—shown as red areas on the finger tip—differ in size and response to touch. Merkel cells and Meissner's corpuscles provide the most precise localization of touch, as they have the smallest receptive fields and are also more sensitive to pressure applied by a small probe. Ruffini's end organs detect tension deep in the skin. Meissner's corpuscles detect changes in texture (vibrations around 50 Hz) and adapt rapidly. Pacinian corpuscles detect rapid vibrations (about 200–300 Hz). Merkel's discs detect sustained touch and pressure. Hair follicle receptors are located in hair follicles and sense position changes of hairs.
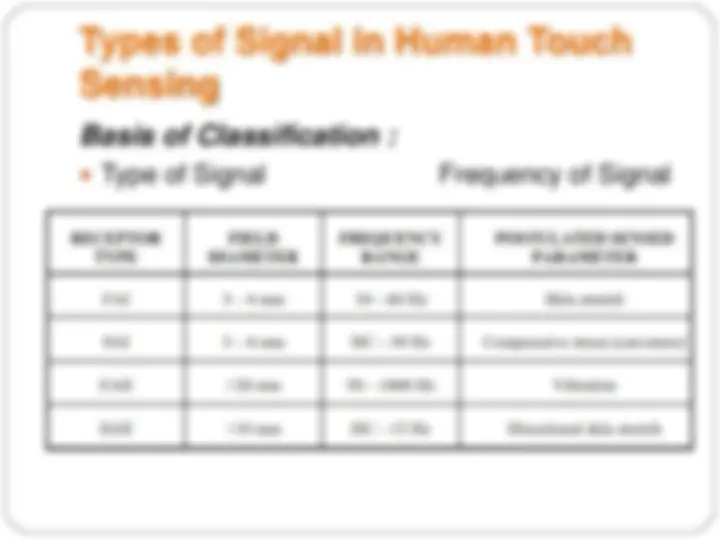
Types of Signal in Human Touch Sensing Basis of Classification : Type of Signal Frequency of Signal
A grid of Tactels
A Thermal Image formed by a Tactel
Tactile sensing: Methods of transduction Usually an array of discrete sensing elements. Sensing elements can be many types: Resistive: strain gauge, piezoresistive. Capacitive Piezoelectric & others like (magnetic, optical, conductive rubber, ultrasonic)
Different Sensor Types and Materials
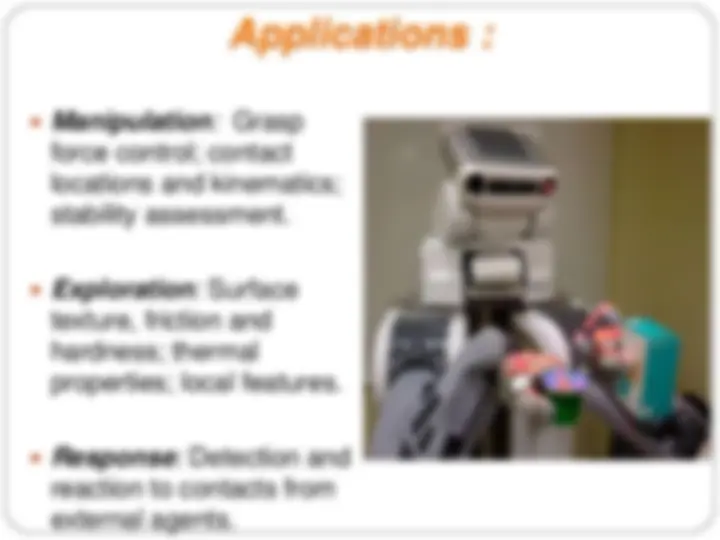
Applications : Manipulation : Grasp force control; contact locations and kinematics; stability assessment. Exploration : Surface texture, friction and hardness; thermal properties; local features. Response : Detection and reaction to contacts from external agents.
The Design for a Robotic Tactile Sensing System
Links of Interest