Download Technical Explanation of Solid-state Relays: Components, Differences, and Troubleshooting and more Exams Design Patterns in PDF only on Docsity!
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
CSM_SSR_TG_E_9_
Introduction
What Is a Solid State Relay?
A Solid State Relay (SSR) is a relay that does not have a moving contact. In terms of operation, SSRs are not very different from
mechanical relays that have moving contacts. SSRs, however, employ semiconductor switching elements, such as thyristors,
triacs, diodes, and transistors.
Structure and Operating Principle
SSRs use electronic circuits to transfer a signal.
Switch section
Electromagnetic section
Motion is transferred.
Input
Output
Signal is transferred (operation is transferred).
- Photocoupler or other device
Input Output
Electromagnetic section ⇒ Input circuit
Switch section Semiconductor switch (thyristor or other device)
These relays transfer signals with
mechanical motion.
Features
Solid State Relays (SSRs)
These relays transfer signals with
electronic circuits.
Features
SSRs do not have the mechanical
moving parts that mechanical
relays with contacts do. Instead
they consist of semiconductors
and electronic parts.
SSRs turn ON/OFF signals,
currents, or voltages electronically
by the operation of these
electronic circuits.
Mechanical relays have contacts
and use electromagnetic force to
mechanically open and close the
contacts to turn ON/OFF signals,
currents, or voltages.
Mechanical Relays
Relays
- For details on mechanical relays, refer to the Technical Explanation for General-purpose Relays.
1. The input device (switch) is turned ON.
3. The switching element in the output
circuit turns ON.
5. The input device (switch) is turned OFF.
ON
Isolated input circuits Output circuits
OFF
Isolated input circuits Output circuits
ON
Isolated input circuits Output circuits
Illustration of SSR Structure
SSR Components (Example)
Isolated input circuits
Output terminals
Input terminals
Output circuits Drive circuit Electrical isolation
Input circuits
Resistor LED Photocoupler Capacitor
Power transistor (for DC loads) Power MOS FET (for AC or DC loads) Thyristor (for AC loads) Triac (for AC loads)
Current flows to the input circuits, the
photocoupler operates, and an electric
signal is transferred to the trigger
circuit in the output circuits.
When the switching element turns ON,
load current flows and the lamp turns
ON.
When the photocoupler turns OFF, the
trigger circuit in the output circuits
turns OFF, which turns OFF the
switching element.
When the switching element turns
OFF, the lamp turns OFF.
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
Features
SSRs are relays that use semiconductor switching elements. They use optical semiconductors called photocouplers to isolate input
and output signals.
The photocouplers change electric signals into optical signals and relay the signals through space, thus fully isolating the input and
output sections while relaying the signals at high speed.
Also, SSRs consist of electronic components with no mechanical contacts. Therefore, SSRs have a variety of features that
mechanical relays do not incorporate.
The greatest feature of SSRs is that SSRs do not use switching contacts that will physically wear out.
Mechanical Relays (General-purpose Relays)
Example of an Electromagnetic Relay (EMR)
An EMR generates electromagnetic force when the input
voltage is applied to the coil. The electromagnetic force
moves the armature. The armature switches the contacts in
synchronization.
Solid State Relays (SSRs)
Representative Example of Switching for AC Loads
Input Output
Electro- magnetic force
Input Terminals Output Terminals
Armature
Moving contact
Core
Coil
Coil terminals Fixed NO contact
Fixed NC contact
Release spring
Coil
Contact
SSR Components (Example)
Isolated input circuits
Output terminals
Input terminals
Drive circuitOutput circuit Electrical isolation
Input circuit
Resistor LED Photocoupler Capacitor
Power transistor (for DC loads) Power MOS FET (for AC or DC loads) Thyristor (for AC loads) Triac (for AC loads)
Phototriac coupler
Input Output Light
Triac
General-purpose Relay Solid State Relay (SSR)
Features
Compact
More compact than an SSR when the same load capacity is
controlled.
Enable downsizing of multi-pole relays.
Etc.
Enable high-speed and high-frequency switching.
Unlimited number of switching operations.
Consist of semiconductors, so there is no contact erosion
caused by switching.
Zero cross function.
No operation noise.
Etc.
Precautions
Limited number of switching operations.
This is because mechanical switching results in contact
erosion.
Etc.
Heat dissipation measures are necessary.
This is due to the greater self heat generation that results
from semiconductor loss compared with electromagnetic
relays (General-purpose Relays).
Etc.
Selection points
Electrical Durability Curves
Example: MY2 (Reference Information)
Derating Curves
10
50
100
500
0 1 2 3 4 5 6 7
24-VDC resistive load
110-VAC resistive load 220-VAC resistive load
10
50
100
500
Contact current (A)
Number of operations (
×^10
4 )
10
50
100
500
0 1 2 3
10
50
100
500
0 1 2 3
24-VDC inductive load L/R = 7 ms
110-VAC inductive load cosφ = 0. 220-VAC inductive load cosφ = 0.
10
50
100
500
0 1 2 3
Number of operations (
×^10
4 )
Contact current (A)
Resistive Load Inductive load
Example: G3PE
(Reference Information)
Example: G3NA
(Reference Information)
30 25
20
15
10 7
0 − 30 − 20 0 20 40 60 80 100
G3PE-225B (L) G3PE-525B (L)
G3PE-215B (L) G3PE-515B (L)
Load current (A)
Ambient temperature (°C)
6 5
4
3
2
1 0 − 30 − 20 0 20 40 60 80 100
With the standard heat sink (Y92B-A100 or Y92B-N50) or an aluminum plate measuring 75 × 75 × 3.2 mm (W×H×t) No heat sink
Load current (A)
Ambient temperature (°C)
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
Control Methods
Precautions for Cycle Control
With cycle control, an inrush current flows five times every second (because the control cycle is 0.2 s).
With a transformer load, the following problems may occur due to the large inrush current (approximately 10 times the rated
current), and controlling the power at the transformer primary side may not be possible.
(1) The SSR may be destroyed if there is not sufficient leeway in the SSR rating.
(2) The breaker on the load circuit may be tripped.
ON/OFF Control
ON/OFF control is a form of control in which a heater is turned
ON and OFF by turning an SSR ON and OFF in response to
voltage output signals from a temperature controller. The
same kind of control is also possible with an electromagnetic
relay, but an SSR must be used to control the heater if it is
turned ON and OFF at intervals of a few seconds over a
period of several years.
Low-cost, noiseless operation
without maintenance is possible.
Phase Control (Single Phase)
With phase control, the output is changed every half-cycle in
response to the current output signals in the range 4 to 20 mA
from a temperature controller. Using this form of control, high-
precision temperature control is possible, and is used widely
with semiconductor equipment.
Precise temperature control is possible.
The heater’s service life is increased.
ON OFF 2 s
Temperature Controller
SSR
Voltage output
Temperature Controller
Current output (^) Power Controller
OFF ON Half a cycle
Optimum Cycle Control
The basic principle used for optimum cycle control is zero
cross control, which determines the ON/OFF status each half
cycle. A waveform that accurately matches the average
output time is output.
The accuracy of the zero cross function is the same as for
conventionally zero cross control. With conventional zero
cross control, however, the output remains ON continuously
for a specific period of time, whereas with optimum cycle
control, the ON/OFF status is determined each cycle to
improve output accuracy.
Many heaters can be control using communications.
Noise-less operation with high-speed response is possible.
Cycle Control
With cycle control (with the G32A-EA), output voltage is
turned ON/OFF at a fixed interval of 0.2s. Control is performed
in response to current output from a temperature controller in
the range 4 to 20 mA.
Noiseless operation with
high-speed response is possible.
EJ
(PLC)
ON/OFF status determined each half cycle.
RS-
communications
SSR + G3ZA Power Controller
Temperature Controller
Current output (^) SSR + Cycle Control Unit
ON OFF 0.2 s
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
Explanation of Terms
Cirsuit functions
Photocoupler
Phototriac coupler
An element that transfers the input signal while isolating the
input and output.
Trigger circuit
A circuit that controls a triac trigger signal, which turns the
load current ON and OFF.
Snubber circuit
A circuit that consists of a resistor R and capacitor C , and is
used to prevent faulty ignition of an SSR triac by suppressing
a sudden rise in the voltage applied to the triac.
Zero Cross Circuit or Zero Cross Function
A circuit which starts operation with the AC load voltage at close to zero-phase.
The zero cross function turns ON the SSR when the AC load voltage is close to 0 V, thereby suppressing the noise generated by
the load current when the load current rises quickly.
The generated noise will be partly imposed on the power line and the rest will be released in the air. The zero cross function
effectively suppresses both noise paths.
Output (load voltage)
ON OFF Input
Power supply voltage
Load current
Without the zero cross function
SSR input
ON
Radiated noise
Voltage drops due to sudden change in current and noise is generated. Power supply voltage
Load current
With the zero cross function
SSR input
ON
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
Characteristics
Operate time
A time lag between the moment a specified signal voltage is
applied to the input terminals and the output is turned ON.
Release time
A time lag between the moment the applied signal voltage is
turned OFF and the output is turned OFF.
Insulation resistance
The resistance between the input and output terminals or
between the I/O terminals and metal housing (heat sink) when
a DC voltage is applied.
Dielectric strength
The effective AC voltage that the SSR can withstand when it
is applied between the input terminals and output terminals or
between the I/O terminals and metal housing (heat sink) for
more than 1 minute.
Ambient operating temperature and humidity
The ranges of temperature and humidity in which the SSR can
operate normally under specified cooling, input/output
voltage, and current conditions.
Storage temperature
The temperature range in which the SSR can be stored
without voltage imposition.
Others
Surge withstand current
The maximum non-repeat current (approx. 1 or 2 repetitions
per day) that can flow in the SSR. Expressed using the peak
value at the commercial frequency in one cycle.
- This value was conventianally expressed as the "withstand inrush current", but has been changed to "surge withstand current" because the former term was easily mistaken for inrush current of loads.
Counter-electromotive Force
A voltage that rises very steeply when the load is turned ON
or OFF.
Bleeder resistance
The resistance connected in parallel to the load in order to
increase apparently small load currents, so that the ON/OFF
of minute currents functions normally.
Bleeder resistance
Load
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
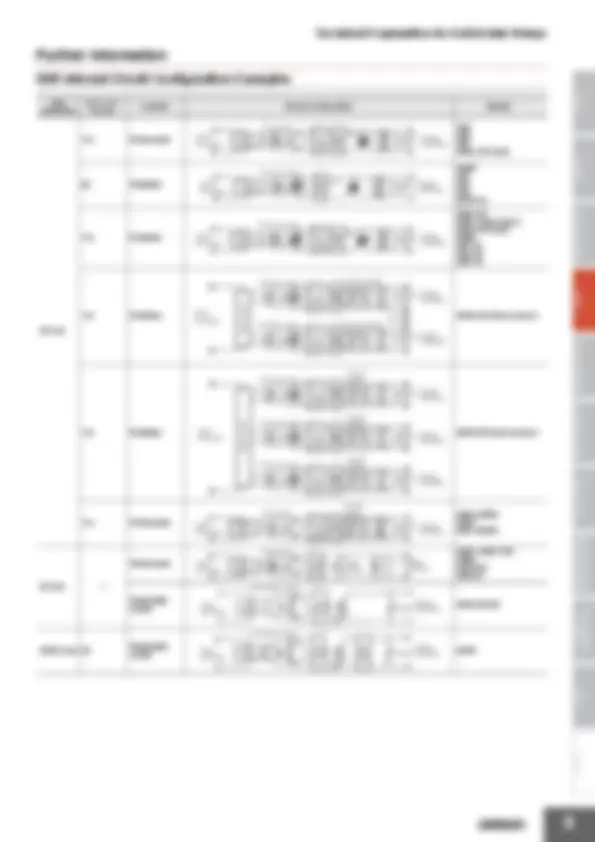
Further Information
SSR Internal Circuit Configuration Examples
Load specifications
Zero cross function Isolation Circuit configuration Models
AC load
Yes Photocoupler
G3H
G3B
G3F
G3NA (AC input)
No Phototriac
G3NE
G3J
G3F
G3H
G3TA-OA
Yes Phototriac
G3PA-VD
G3PE (single phase) G3NA (DC input) G3NE G3F-VD G3H-VD G3B-VD
Yes Phototriac G3PE-2(N) (three phases)
Yes Phototriac G3PE-3(N) (three phases)
Yes Photocoupler
G3NA-4@@B
G3PH
G3PA-4@@B
DC load ---
Photocoupler
G3FD, G3HD-X
G3BD
G3TA-OD
G3NA-D
Photovoltaic coupler
G3HD-202SN
AC/DC load No Photovoltaic coupler
G3FM
Photocoupler Input terminals
Input circuit
Triac Snubber circuit
Output terminals Zero crosscircuitTriggercircuit
Phototriac coupler Input terminals
Input circuit
Triac (^) Snubber circuit
Output terminals Triggercircuit
Phototriac coupler Input terminals
Input circuit
Triac (^) Snubber circuit
Output terminals Zero crosscircuitTriggercircuit
Input terminals
Snubber circuit
Output terminals
Snubber circuit
Output terminals
Thyristor module
Phototriac coupler Thyristor module
Phototriac coupler Input circuit
Zero crosscircuit
Zero crosscircuitTriggercircuit
Triggercircuit
Phototriac coupler
Phototriac coupler
Phototriac coupler
Thyristor module
Thyristor module
Thyristor module Input terminals
Snubber circuit
Output terminals
Snubber circuit
Output terminals
Snubber circuit
Output terminals
Input circuit
Zero crosscircuit
Zero crosscircuit
Zero crosscircuit
Triggercircuit
Triggercircuit
Triggercircuit
Photocoupler Input terminals
Input circuit
Snubber circuit
Output Triggercircuit terminals Zero crosscircuit
Thyristor module
Photocoupler Input terminals
Input circuit
Counter electromotiveforce protective diode
Output terminals Drivecircuit
Output transistor
Varistor
Photovoltaic coupler
Input terminals
Input circuit
Output terminals Drivecircuit
Input terminals
Input circuit
Photovoltaic coupler
Drivecircuit Outputcircuit
Varistor
Output terminals
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
MOS FET Relays
1. What Is a MOS FET Relay?
MOS FET relays are a type of SSR that are mounted on PCBs and use power MOS FETs for their output elements. They are
mainly used in signal switching and connection applications.
2. Structure and Operating Principle
MOS FET relays use photodiode arrays as the light-receiving elements to operate the power MOS FETs that function as their
output elements.
3. Names
MOS FET relays have a relatively short history and have been given a variety of names and brands by their manufacturers.
The table in the right shows examples of relays for
signal applications (equivalent to the G3VM)
LED
Input Output
Photodiode array
Gate
Gate
Power MOS FET Drain
Source Varistor
Drain
Control circuit
MOS FET relays operate according to the following principles.
(1) The LED lights when the current flows to the input side.
(2) The light from the LED is received by the photodiode array,
which generates electricity to convert the light back to a voltage.
(3) This voltage passes through the control circuit to become the
gate voltage to drive the MOS FET.
According to OMRON investigation in December 2015.
Manufacturer Name in catalog
Toshiba Photo Relay Panasonic Photo MOS Relay
NEC MOSFET Relay OKI Electric Industry Photo MOS Switch
Okita Works Photo DMOS-FET Relay HP Solid-state Relay
OMRON MOS FET Relay
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
4. Glossary
Term Symbol Description
Absolute maximum ratings
Absolute maximum ratings
The maximum values that must never be exceeded even instantaneously Unless otherwise specified, these values are given at Ta = 25°C.
Input
LED forward current IF The rated current that can flow continuously in the LED forward direction Repetitive peak LED forward current I FP The rated current that can flow momentarily in the LED forward direction
LED forward current reduction rate
ΔIF/°C
The reduction rate for the current that can flow in the LED forward direction in relation to the ambient temperature LED reverse voltage V R The rated reverse voltage that can be applied between the cathode and the anode Junction temperature T j The rated temperature that is allowed at the LED junction
Output
Load voltage V OFF
The rated voltage that can be applied between the relay output terminals when switching the load or in the OFF state The peak voltage for AC
Continuous load current
IO
The rated current that can flow between the relay output terminals in the ON state under the specified temperature conditions The peak current for AC ON current reduction rate ΔI o/°C The reduction rate for the current that can flow between the relay output terminals in the ON state in relation to the ambient temperature Pulse ON current IOP The rated current that can flow instantaneously between the relay output terminals in the ON state Junction temperature T j The rated temperature that is allowed at the light-receiving circuit junction
Dielectric strength between input and output V I-O The voltage that the isolation between the input and output can withstand
Ambient operating temperature T a The ambient temperature range in which the relay can be operated without damaging the functionality of the relay Storage temperature T stg The ambient temperature range in which the relay may be stored while not operating Soldering temperature --- The rated temperature at which the terminals can be soldered without damaging the functionality of the relay
Electrical characteristics
Input
LED forward voltage V F The voltage drop between the LED anode and cathode at a certain forward current Reverse current IR The leakage current flowing in the LED reverse direction (between cathode and anode) Capacitance between terminals C T The electrostatic capacitance between the LED anode and cathode terminals
Trigger LED forward current
The minimum input current that is required to change the relay output state To ensure operation of the relay, a current that is equal to or greater than the highest specified value must be used.
I FT The minimum value of the input current I F that is required to change a normally-open output MOS FET to the ON state
I FC The minimum value of the input current I F that is required to change a normally-closed output MOS FET to the OFF state
Release LED forward current
The maximum input current that is required to release the relay output state. To ensure release of the relay, the current must be equal to or less than the minimum specified value.
I FC The maximum value of the input current I F that must flow to change a normally-open output MOS FET to the OFF state
I FT The maximum value of the input current I F that must flow to change a normally-closed output MOS FET to the ON state
Output
Maximum resistance with output ON R ON The resistance between the relay output terminals in the specified ON state
Current leakage when the relay is open I Leak The leakage current that flows between the relay output terminals when the specified voltage is applied in the OFF state Capacitance between terminals C OFF The electrostatic capacitance between the relay output terminals in the specified OFF state
Limit current I LIM The load current that is maintained when current limiting is activated Capacitance between I/O terminals C I-O The electrostatic capacitance between the input and output terminals
Insulation resistance between I/O terminals R I-O The resistance between the input and output terminals at the specified voltage value
Turn-ON time tON
The time required for the output waveform to change after the specified input LED current is applied NO relay: The time required for the output waveform to change from 100% to 10% after the input goes from OFF to ON state NC relay: The time required for the output waveform to change from 100% to 10% after the input goes from ON to OFF state
Turn-OFF time tOFF
The time required for the output waveform to change after the specified input LED current is interrupted NO relay: The time required for the output waveform to change from 0% to 90% after the input goes from ON to OFF state NC relay: The time required for the output waveform to change from 0% to 90% after the input goes from OFF to ON state
Equivalent rise time ERT
An indicator of the output transition characteristics for fast signals or pulse signals The ERT is expressed by the following formula, where tr in is the input waveform rise time and trout is the output waveform rise time after relay transition. The lower the value, the less change there is in the signal, making for good characteristics. ERT=√(tr out^2 -tr in^2 )
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
Application Circuit Examples
1. Connection to Sensor
The SSR can be connected directly to a proximity sensor or
photoelectric sensor.
2. Switching Control of Incandescent Lamp
3. Temperature Control of Electric Furnace
4. Forward and Reverse Operation of Single-phase Motor
5. ON/OFF Control of Three-phase Inductive Motor
6. Forward and Reverse Operation of Three-phase Motor
Make sure that signals input into the SSR Units are proper if
the SSR Units are applied to the forward and reverse
operation of a threephase motor. If SW1 and SW2 as shown
in the following circuit diagram are switched over
simultaneously, a phase short-circuit will result on the load
side, which may damage the output elements of the SSR
Units. This is because the SSR has a triac as the output
element and the triac is ON until the load current becomes
zero regardless of the absence of input signals into the SSR.
Therefore, make sure that there is a time lag of 30 ms or more
to switch SW1 and SW2.
The SSR may be damaged due to phase short-circuiting if the
SSR malfunctions with noise in the input circuit of the SSR. To
protect the SSR from phase short-circuiting damage, the
protective resistance R may be inserted into the circuit.
The value of the protective resistance R must be determined
according to the surge withstand current of the SSR.
For example, the G3NA-220B withstands an surge current of
220 A. The value of the protective resistance R is obtained
from the following formula:
R > 220 V x /200 A = 1.4 Ω
Considering the circuit current and ON time, insert the
protective resistance into the side that reduces the current
consumption.
Obtain the consumption power of the resistance from the
following formula:
P = I^2 R x Safety factor
(I = Load current, R = Protective resistance, Safety factor = 3 to 5)
(Black)
(Blue)
(Brown)
Load power supply
Load
Sensor
Input signal source
Incandescent lamp
Load power supply
Input signal source and Temperature Controller
Load heater
Load power supply
Motor
Load power supply
Note: 1. The voltage between the load terminals of either SSR 1
or SSR 2 turned OFF is approximately twice as high as
the supply voltage due to LC coupling. Be sure to apply
an SSR model with a rated output voltage of at least twice
the supply voltage.
For example, if forward/reverse operation is to be
performed on a single-phase inductive motor with a
supply voltage of 100 VAC, the SSR must have an output
voltage of 200 VAC or higher.
2. Make sure that there is a time lag of 30 ms or more to
switch over SW1 and SW2.
- Resistor to limit advanced phase capacitor discharge current. To select a suitable resistor, consult with the manufacturer of the motor.
Input signal source
Motor
Three- phase power supply
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
7. Transformer Tap Selection
SSRs can be used to switch between transformer taps. In this
case, however, be aware of voltage induced on the OFF-side
SSR.
The induced voltage increases in proportion to the number of
turns of the winding that is almost equivalent to the tap
voltage.
See the following example. The power supply voltage is at
200 V, N1 is 100, N2 is 100, and SSR2 is ON. Then the
difference in voltage between output terminals of SSR1 is at
400 V (i.e., twice as high as the power supply voltage).
8. Inrush Currents to Transformer Loads
The inrush current from a transformer load will reach its peak
when the secondary side of the transformer is open, when no
mutual reactance will work. It will take half a cycle of the power
supply frequency for the inrush current to reach its peak, the
measurement of which without an oscilloscope will be difficult.
The inrush current can be, however, estimated by measuring
the DC resistance of primary side of the transformer. Due to
the self-reactance of the transformer in actual operation, the
actual inrush current will be less than the calculated value.
I peak = V peak/R = ( × V)/R
If the transformer has a DC resistance of 3. and the load
power supply voltage is 220 V, the following inrush current will
flow.
I peak = (1.414 × 220)/3 = 103.7 A
The surge withstand current of OMRON's SSRs is specified
on condition that the SSRs are used in nonrepetitive operation
(approximately one or two operations per day). If your
application requires repetitive SSR switching, use an SSR
with a withstand surge current twice as high as the rated value
(Ipeak).
In the above case, use the G3@@-220@ with a surge
withstand current of 207.4 A or more.
The DC resistance of the primary side of the transformer can
be calculated from the withstand surge current by using the
following formula.
R = V peak/I peak =( ×V)/I peak
For applicable SSRs based on the DC resistance of the
primary side of the transformer, refer to the tables below.
These tables list SSRs with corresponding surge withstand
current conditions. When you use SSRs in actual applications,
however, check the steady-state currents of the transformers
satisfy the rated current requirement of each SSR.
SSR Rated Current
G3@@-240@
The underlined two digits refer to the rated current (i.e., 40A
in the case of the above model).
Three digits may be used for the G3PH only.
G3PH: G3PH-@075B = 75 A
G3PH-@150 = 150 A
Condition 1: The ambient temperature of the SSR (the
temperature inside the panel) is within the rated
value specified.
Condition 2: The right heat sink is provided to the SSR.
Load Power Supply Voltage of 100 V Load Power Supply Voltage of 110 V
SSR
SSR2 Load heater
N
N
Transformer DC resistance ( Ω )
Inrush current (A)
SSR's surge withstand current (A)
Applicable SSR
G3P @ G3NA G3NE G3PH
4.8 min. 30 60 --- -205@ -205@ ---
1.9 to 4.7 75 150
1.3 to 1.8 110 220
0.65 to 1.2 220 440
0.36 to 0.64 400 800 --- --- --- -2075@ 0.16 to 0.35 900 1,800 --- --- --- -2150@
Transformer DC resistance ( Ω )
Inrush current (A)
SSR's surge withstand current (A)
Applicable SSR
G3P @ G3NA G3NE G3PH
5.2 min. 30 60 --- -205@ -205@ ---
2.1 to 5.1 75 150
1.5 to 2.0 110 220
0.71 to 1.4 220 440
0.39 to 0.70 400 800 --- --- --- -2075@ 0.18 to 0.38 900 1,800 --- --- --- -2150@
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
Fail-safe Concept
1. Error Mode
The SSR is an optimum relay for high-frequency switching
and high-speed switching, but misuse or mishandling of the
SSR may damage the elements and cause other problems.
The SSR consists of semiconductor elements, and will break
down if these elements are damaged by surge voltage or
overcurrent. Most faults associated with the elements are
short-circuit malfunctions, whereby the load cannot be turned
OFF.
Therefore, to provide a fail-safe measure for a control circuit
using an SSR, design a circuit in which a contactor or circuit
breaker on the load power supply side will turn OFF the load
when the SSR causes an error. Do not design a circuit that
turns OFF the load power supply only with the SSR. For
example, if the SSR causes a half-wave error in a circuit in
which an AC motor is connected as a load, DC energizing
may cause overcurrent to flow through the motor, thus burning
the motor. To prevent this from occurring, design a circuit in
which a circuit breaker stops overcurrent to the motor.
2. Overcurrent Protection
A short-circuit current or an overcurrent flowing through the
load of the SSR will damage the output element of the SSR.
Connect a quick-break fuse in series with the load as an
overcurrent protection measure.
Design a circuit so that the protection coordination conditions
for the quick-break fuse satisfy the relationship between the
SSR surge resistance (I S), quick-break fuse current-limiting
feature (I F), and the load inrush current (I L), shown in the
following chart.
3. Operation Indicator
The operation indicator turns ON when current flows through
the input circuit. It does not indicate that the output element is
ON.
Heat Radiation Designing
1. SSR Heat Radiation
Triacs, thyristors, and power transistors are
semiconductors that can be used for an SSR output circuit.
These semiconductors have a residual voltage internally
when the SSR is turned ON. This is called output-ON
voltage drop. If the SSR has a load current, the Joule
heating of the SSR will result consequently. The heating
value P (W) is obtained from the following formula.
Heating value P (W) = Output-ON voltage drop (V) ×
Carry current (A)
For example, if a load current of 8 A flows from the G3NA-
210B, the following heating value will be obtained:
P = 1.6 V × 8 A = 12.8 W
If the SSR employs power MOS FET for SSR output, the
heating value is calculated from the ON-state resistance of
the power MOS FET instead.
In that case, the heating value P (W) can be calculated with
the following formula:
P (W) = Load current^2 (A) × ON-state resistance (Ω)
If the G3RZ is used with a load current of 0.5 A, the
following heating value will be obtained:
P (W) = 0.5^2 A × 2.4 Ω = 0.6 W
The ON-state resistance of a power MOS FET increases
with an increase in the junction temperature of a power
MOS FET.
Therefore, the ON-state resistance varies while the SSR is
in operation. If the load current is 80% of the load current or
higher, as a simple method, the ON-state resistance will be
multiplied by 1.5.
P (W) = 1^2 A × 2.4 Ω × 1.5 = 3.6 W
The SSR in usual operation switches a current of
approximately 5 A with no heat sink used. If the SSR must
switch a higher current, a heat sink will be required. The
higher the load current is, the larger the heat sink size will
be. If the switching current is 10 A or more, the size of the
SSR with a heat sink will exceed a single mechanical relay.
This is a disadvantage of SSRs in terms of circuit
downsizing.
2. Heat Sink Selection
SSR models with no heat sinks (i.e., the G3NA, G3NE, and
three-phase G3PE) need external heat sinks. When using
any of these SSRs, select the ideal combination of the SSR
and heat sink according to the load current.
The following combinations are ideal, for example.
G3NA-220B: Y92B-N100,
G3NE-210T(L): Y92B-N50,
G3PE-235B-3H: Y92B-P
A Commercially available heat sink equivalent to an
OMRON-made one can be used, on conditoin that the
thermal resistance of the heat sink is lower than that of the
OMRON-made one.
For example, the Y92B-N100 has a thermal resistance of
1.63°C/W.
If the thermal resistance of the standard heat sink is lower
than this value (i.e., 1.5°C/W, for example), the standard
heat sink can be used for the G3NA-220B.
Thermal resistance indicates a temperature rise per unit
(W). The smaller the value is, the higher the efficiency of
heat radiation will be.
Location Cause Result Input area Overvoltage Input element damage
Output area
Overvoltage Output element damage Overcurrent
Whole Unit
Ambient temperature exceeding maximum (^) Output element damage Poor heat radiation
I S
I F
I L
I S > I F > I L
Peak current (A)
Time (unit: s)
Input terminalInput circuit Output circuit Output terminal
Input indicator
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
3. Calculating Heat Sink Area
An SSR with an external heat sink can be directly mounted
to control panels under the following conditions.
- If the heat sink is made of steel used for standard panels,
do not apply a current as high as or higher than 10 A,
because the heat conductivity of steel is less than that of
aluminum. Heat conductivity (in units of W·m·°C) varies with
the material as described below.
Steel: 20 to 50
Aluminum: 150 to 220
The use of an aluminum-made heat sink is recommended
if the SSR is directly mounted to control panels. Refer to the
data sheet of the SSR for the required heat sink area.
- Apply heat-dissipation silicone grease (e.g., the YG
from Momentive Performance Materials or the G746 from
Shin-Etsu Silicones) or attach a heat conductive sheet
between the SSR and heat sink. There will be a space
between the SSR and heat sink attached to the SSR.
Therefore, the generated heat of the SSR cannot be
radiated properly without the grease. As a result, the SSR
may be overheated and damaged or deteriorated.
The heat dissipation capacity of a heat conduction sheet is
generally inferior to that of silicone grease. If a heat
conduction sheet is used, reduce the load current by
approximately 10% from the Load Current vs. Ambient
Temperature Characteristics graph.
4. Control Panel Heat Radiation Designing
Control equipment using semiconductors will generate
heat, regardless of whether SSRs are used or not. The
failure rate of semiconductors greatly increases when the
ambient temperature rises. It is said that the failure rate of
semiconductors will be doubled when the temperature rises
10°C (Arrhenius model).
Therefore, it is absolutely necessary to suppress the
interior temperature rise of the control panel in order to
ensure the long, reliable operation of the control equipment.
Heat-radiating devices in a wide variety exists in the control
panel. As a matter of course, it is necessary to consider the
total temperature rise as well as local temperature rise of
the control panel. The following description provides
information on the total heat radiation designing of the
control panel.
As shown below, the heat conductivity Q will be obtained
from the following formula, provided that th and tc are the
temperature of the hot fluid and that of the cool fluid
separated by the fixed wall.
Q = k (t h - t c ) A
Where, k is an overall heat transfer coefficient (W/m^2 °C).
This formula is called a formula of overall heat transfer.
When this formula is applicable to the heat conductivity of
the control panel under the following conditions, the heat
conductivity Q will be obtained as shown below.
Average rate of overall heat transfer of control panel:
k (W/m^2 °C)
Internal temperature of control panel: T h (°C)
Ambient temperature: Tc (°C)
Surface area of control panel: S (m^2 )
Q = k × (Th - T c) × S
The required cooling capacity is obtained from the following
formula.
Desired internal temperature of control panel: Th (°C)
Total internal heat radiation of control panel: P 1 (W)
Required cooling capacity: P 2 (W)
P 2 = P 1 - k × (T h - Tc ) × S
The overall heat transfer coefficient k of a standard fixed wall
in a place with natural air ventilation will be 4 to 12 (W/m2°C).
In the case of a standard control panel with no cooling fan, it is
an empirically known fact that a coefficient of 4 to 6 (W/m2°C)
is practically applicable. Based on this, the required cooling
capacity of the control panel is obtained as shown below.
Example
- Desired internal temperature of control panel: 40°C
- Ambient temperature: 30°C
- Control panel size 2.5 × 2 × 0.5 m (W × H × D)
Self-sustained control panel (with the bottom area
excluded from the calculation of the surface area)
- SSRs: 20 G3PA-240B Units in continuous operation at 30 A.
- Total heat radiation of all control devices except SSRs:
500 W
Total heat radiation of control panel: P
P1 = Output-ON voltage drop 1.6 V × Load current 30 A
× 20 SSRs + Total heat radiation of all control
devices except SSRs
= 960 W + 500 W = 1460 W
Heat radiation from control panel: Q
Q2 = Rate of overall heat transfer 5 × (40°C − 30°C) ×
(2.5 m × 2 m × 2 + 0.5m × 2 m × 2 + 2.5 m × 0.5 m)
= 662.5 W
Therefore, the required cooling capacity P2 will be obtained
from the following formula:
P2 = 1,460 − 663 = 797 W
Therefore, the heat radiation from the surface of the control
panel is insufficient. More than a heat quantity of 797 W
needs to be radiated outside the control panel.
Usually, a ventilation fan with a required capacity will be
installed. If the fan is not sufficient, an air conditioner for the
control panel will be installed. The air conditioner is ideal for
the long-time operation of the control panel because it will
effectively dehumidify the interior of the control panel and
eliminate dust gathering in the control panel.
Axial-flow fan: OMRON’s R87B, R87F, and R87T Series
Air conditioner for control panel: Apiste’s ENC Series
Temperature
Hot fluid
Fixed wall
Cool fluid
Distance
t h
t c
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
3. Ventilation
4. Confirmation after Installation
The above conditions are typical examples confirmed by
OMRON. The application environment may affect conditions
and ultimately the ambient temperature must be measured
under power application to confirm that the load current-
ambient temperature ratings are satisfied for each model.
Ambient Temperature Measurement Conditions
(1) Measure the ambient temperature under the power
application conditions that will produce the highest
temperature in the control panel and after the ambient
temperature has become saturated.
(2) Refer to Figure 1 for the measurement position. If there is
a duct or other equipment within the measurement
distance of 100 mm, refer to Figure 2. If the side
temperature cannot be measured, refer to Figure 3.
(3) If more than one row of SSRs are mounted in the control
panel, measure the ambient temperature of each row,
and use the position with the highest temperature.
Consult your OMRON dealer, however, if the
measurement conditions are different from those given
above.
If the air inlet or air outlet has a filter, clean the filter regularly to prevent it from clogging and ensure an efficient flow of air. Do not locate any objects around the air inlet or air outlet, or otherwise the objects may obstruct the proper ventilation of the control panel. A heat exchanger, if used, should be located in front of the G3PA Units to ensure the efficiency of the heat exchanger.
G3PA G3PA
G3PA
Duct (^) Duct (^) Duct
Duct
Duct Duct
Ventilation outlet
Air inlet
Be aware of air flow
100 mm Ambient temperature measurement position
Figure 1: Basic Measurement Position for Ambient Temperature
100 mm Center
Ambient temperature measurement range
Figure 3: Measurement Position when Side Temperature Cannot be Measured
L (100 mm or less)
L/
Ambient temperature measurement position
Other Device
Figure 2: Measurement Position when a Duct or Other Device is Present
Definition of Ambient Temperature
SSRs basically dissipate heat by natural convection.
Therefore, the ambient temperature is the temperature of
the air that dissipates the heat of the SSR.
Sensors
Switches
Safety Components
Relays
Control Components
Automation Systems
Motion / Drives
Environment Measure EquipmentEnergy Conservation Support /
Power Supplies / In Addition
Others
Common
FAQs
What is the difference in switching with a
thyristor and a triac?
There is no difference between them as long as
resistive loads are switched. For inductive loads,
however, thyristors are superior to triacs due to the
inverse parallel connection of the thyristors.
For the switching element, an SSR uses either a triac
or a pair of thyristors connected in an inverse parallel
connection.
There is a difference between thyristors and triacs in
response time to rapid voltage rises or drops.
This difference is expressed by dv/dt (V/μs). This
value of thyristors is larger than that of triacs.
Triacs can switch inductive motor loads that are as
high as 3.7 kW.
Furthermore, a single triac can be the functional
equivalent of a pair of thyristors connected in an
inverse parallel connection and can thus be used to
contribute to downsizing SSRs.
Note: dv/dt = Voltage rise rate.
What is silicone grease?
Special silicone grease is used to aid heat dissipation.
The heat conduction of this special silicone grease is
five to ten times higher than that of standard silicone
grease.
This special silicone grease is used to fill the space
between a heat-radiating part, such as an SSR, and
the heat sink to improve the heat conduction of the
SSR.
Unless special silicone grease is applied, the
generated heat of the SSR will not be radiated
properly. As a result, the SSR may break or
deteriorate due to overheating.
Available Silicone Grease Products for
Heat Dissipation
Momentive Performance Materials: YG
Shin-Etsu Silicones: G746, G
Structures and Functions of SSRs
Resistive load Inductive load
40 A max. Over 40 A 3.7 kW max. Over 3.7 kW
Triac OK OK OK Not as good Two thyristors
OK OK OK OK
Triac
Thyristors connected in an inverse parallel connection
ΔV
ΔT
T
V
Δ V/ Δ T = dv/dt: Voltage rise rate