



Travelling Salesperson Problem
(TSP)
•Very famous problem
•Many practical applications
•Very easy to describe
•Very difficult to solve (Curse of Dimensionality)
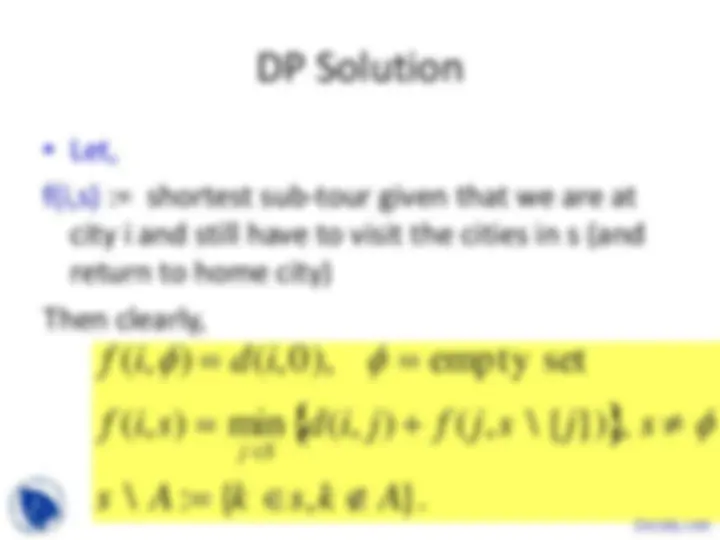
•We shall consider the dynamic
programming (DP) approach
Docsity.com


















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An in-depth analysis of the travelling salesperson problem (tsp), a well-known problem in computer science and mathematics. The problem formulation, mathematical versions, and solutions using linear programming (lp) and dynamic programming (dp) approaches. It also explains the concept of sub-tours and the subtour elimination constraint. Useful for students and researchers in computer science, mathematics, and operations research.
Typology: Slides
1 / 32

This page cannot be seen from the preview
Don't miss anything!
Problem Formulation
Maths versions
TSP Version 1 (LP)
z = x ( i , j ) d ( i , j ) j = 1
n
i = 1
n
x ( i , j ) j = 1
n
x ( i , j ) i = 1
n
No!
Explanation: sub-tours
x =
x ( i , j ) ≤ S i , j ∈ S
x =
x ( i , j ) = 2 i , j ∈ S
LP-Free Version
ASSUMPTION
Constraints
{^ x 1 ,...,^ xn } =^ {1, 2,3,..., n }
min x d (0, x 1 ) + d ( x (^) j j = 1
n − 1