Download Trigonometric Polynomials Approximation Theory | MATH 541 and more Study notes Mathematics in PDF only on Docsity!
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Numerical Analysis and Computing
Lecture Notes #
— Approximation Theory —
Trigonometric Polynomial Approximation
Peter Blomgren,
〈[email protected]〉
Department of Mathematics and Statistics
Dynamical Systems Group
Computational Sciences Research Center
San Diego State University
San Diego, CA 92182-
http://terminus.sdsu.edu/
Fall 2009
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Outline
1 Trigonometric Polynomial Approximation
Introduction
Fourier Series
2 The Discrete Fourier Transform
Introduction
Discrete Orthogonality of the Basis Functions
(^3) Trigonometric Least Squares Solution
Expressions
Examples
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Fourier Series
Fourier Series: First Observations
For each positive integer n, the set of functions
0
1
2 n− 1
}, where
0
(x) =
k
(x) = cos(kx), k = 1,... , n
n+k
(x) = sin(kx), k = 1,... , n − 1
is an Orthogonal set on the interval [−π, π] with respect to the
weight function w (x) = 1.
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Fourier Series
Orthogonality
Orthogonality follows from the fact that integrals over [−π, π] of
cos(kx) and sin(kx) are zero (except cos(0)), and products can be
rewritten as sums:
sin θ 1 sin θ 2 =
cos(θ 1
− θ 2
) − cos(θ 1
cos θ 1
cos θ 2
cos(θ 1
− θ 2
) + cos(θ 1
sin θ 1
cos θ 2
sin(θ 1 − θ 2 ) + sin(θ 1 + θ 2 )
Let Tn be the set of all linear combinations of the functions
0
1
2 n− 1
}; this is the set of trigonometric
polynomials of degree ≤ n.
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Fourier Series
Example: Approximating f (x) = |x| on [−π, π] 1 of 2
First we note that f (x) and cos(kx) are even functions on [−π, π]
and sin(kx) are odd functions on [−π, π]. Hence,
a 0 =
1
π
∫ π
−π
|x| dx =
2
π
∫ π
0
x dx = π.
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Fourier Series
Example: Approximating f (x) = |x| on [−π, π] 1 of 2
First we note that f (x) and cos(kx) are even functions on [−π, π]
and sin(kx) are odd functions on [−π, π]. Hence,
a 0 =
1
π
∫ π
−π
|x| dx =
2
π
∫ π
0
x dx = π.
ak =
1
π
∫ π
−π
|x| cos(kx) dx =
2
π
∫ π
0
x cos(kx) dx
=
2
π
x
sin(kx)
k
∣
∣
∣
∣
π
0
︸ ︷︷ ︸
0
−
2
kπ
∫ π
0
1 · sin(kx) dx
=
2
πk
2
[cos(kπ) − cos(0)] =
2
πk
2
[
(−1)
k − 1
]
.
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Fourier Series
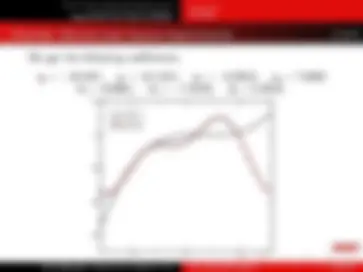
Example: Approximating f (x) = |x| on [−π, π] 2 of 2
We can write down Sn(x) =
π
π
n ∑
k=
k − 1
k
2
cos(kx)
-2 0 2
0
1
2
3
4
f(x)
S0(x)
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Fourier Series
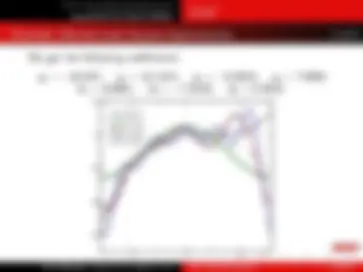
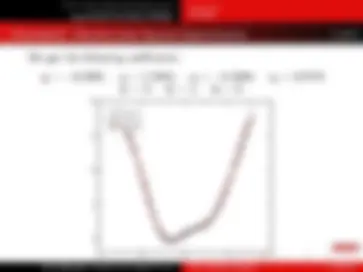
Example: Approximating f (x) = |x| on [−π, π] 2 of 2
We can write down Sn(x) =
π
π
n ∑
k=
k − 1
k
2
cos(kx)
-2 0 2
0
1
2
3
4
f(x)
S1(x)
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Fourier Series
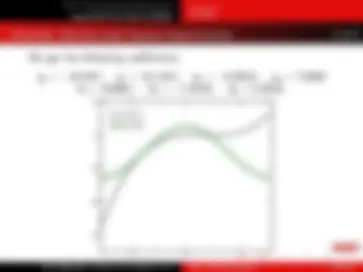
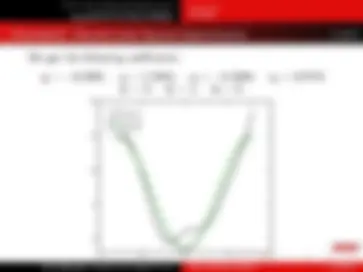
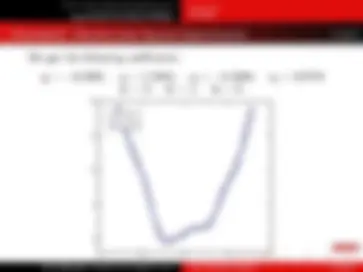
Example: Approximating f (x) = |x| on [−π, π] 2 of 2
We can write down Sn(x) =
π
π
n ∑
k=
k − 1
k
2
cos(kx)
-2 0 2
0
1
2
3
4
f(x)
S5(x)
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Fourier Series
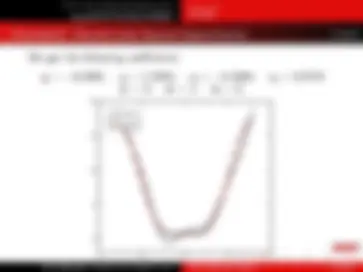
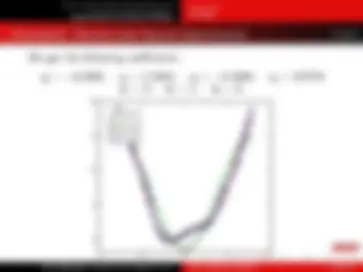
Example: Approximating f (x) = |x| on [−π, π] 2 of 2
We can write down Sn(x) =
π
π
n ∑
k=
k − 1
k
2
cos(kx)
-2 0 2
0
1
2
3
4
f(x)
S7(x)
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Discrete Orthogonality of the Basis Functions
The Discrete Fourier Transform: Introduction
The discrete Fourier transform, a.k.a. the finite Fourier transform,
is a transform on samples of a function.
It, and its “cousins,” are the most widely used mathematical
transforms; applications include:
Signal Processing
Image Processing
Audio Processing
Data compression
A tool for partial differential equations
etc...
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Discrete Orthogonality of the Basis Functions
The Discrete Fourier Transform
Suppose we have 2m data points, (xj , fj ), where
x j
= −π +
jπ
m
, and f j
= f (x j
), j = 0, 1 ,... , 2 m − 1.
The discrete least squares fit of a trigonometric polynomial
S
n
(x) ∈ T n
minimizes
E (S
n
2 m− 1 ∑
j=
[S
n
(x j
) − f j
]
2
.
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Discrete Orthogonality of the Basis Functions
Orthogonality of the Basis Functions! (A Lemma)...
Lemma
If the integer r is not a multiple of 2 m, then
2 m− 1 ∑
j=
cos(rxj ) =
2 m− 1 ∑
j=
sin(rxj ) = 0.
Moreover, if r is not a multiple of m, then
2 m− 1 ∑
j=
[cos(rx j
)]
2
2 m− 1 ∑
j=
[sin(rx j
)]
2 = m.
The Discrete Fourier Transform
Trigonometric Least Squares Solution
Introduction
Discrete Orthogonality of the Basis Functions
Proof of Lemma 1 of 3
Recalling long-forgotten (or quite possible never seen) facts from
Complex Analysis — Euler’s Formula:
e
iθ = cos(θ) + i sin(θ).