Download Differential and Vector Calculus in the Context of Solid Mechanics and more Exams Dynamics in PDF only on Docsity!
1.6 Vector Calculus 1 - Differentiation
Calculus involving vectors is discussed in this section, rather intuitively at first and more
formally toward the end of this section.
1.6.1 The Ordinary Calculus
Consider a scalar-valued function of a scalar , for example the time-dependent density
of a material ( t ). The calculus of scalar valued functions of scalars is just the
ordinary calculus. Some of the important concepts of the ordinary calculus are reviewed
in Appendix B to this Chapter, §1.B.2.
1.6.2 Vector-valued Functions of a scalar
Consider a vector-valued function of a scalar , for example the time-dependent
displacement of a particle u u ( t ). In this case, the derivative is defined in the usual
way,
t
t t t
dt
d t
lim (^0)
u u u ,
which turns out to be simply the derivative of the coefficients
1 ,
i
i
dt
du
dt
du
dt
du
dt
du
dt
d e e e e
u 3
3 2
2 1
1
Partial derivatives can also be defined in the usual way. For example, if u is a function of
the coordinates, u ( x 1 , x 2 , x 3 ), then
1
1 1 2 3 1 2 3 0 1
lim 1 x
x x x x x x x
x
x
u u u
Differentials of vectors are also defined in the usual way, so that when u 1 (^) , u 2 , u 3 undergo
increments du 1 (^) u 1 , du 2 u 2 , du 3 u 3 , the differential of u is
d u du 1 e 1 du 2 e 2 du 3 e 3
and the differential and actual increment u approach one another as
u 1 , u 2 , u 3 0.
(^1) assuming that the base vectors do not depend on t
Space Curves
The derivative of a vector can be interpreted geometrically as shown in Fig. 1.6.1: u is
the increment in u consequent upon an increment t in t. As t changes, the end-point of
the vector u ( t )traces out the dotted curve shown – it is clear that as t 0 , u
approaches the tangent to , so that d u / dt is tangential to . The unit vector tangent to
the curve is denoted by τ :
d dt
d dt
u
u τ (1.6.1)
Figure 1.6.1: a space curve; (a) the tangent vector, (b) increment in arc length
Let s be a measure of the length of the curve , measured from some fixed point on .
Let s be the increment in arc-length corresponding to increments in the coordinates,
T u u 1 (^) , u 2 , u 3 , Fig. 1.6.1b. Then, from the ordinary calculus (see Appendix
1.B),
2 3
2 2
2 1
2 ds du du du
so that
2 3
2 2
2 1
dt
du
dt
du
dt
du
dt
ds
But
3
3 2
2 1
1 e e e
u
dt
du
dt
du
dt
du
dt
d
so that
dt
ds
dt
d
u (1.6.2)
u ( t ) u ( t t )
u
τ
s
x 1
x 2
du 1
ds du 2
s
(a) (b)
ds
d τ ν
Figure 1.6.2: the curvature
This can be seen geometrically in Fig. 1.6.2: from Eqn. 1.6.5, τ is a vector of
magnitude s in the direction of the vector normal to τ. The radius of curvature R is
defined as the reciprocal of the curvature; it is the radius of the circle which just touches
the curve at s , Fig. 1.6.2.
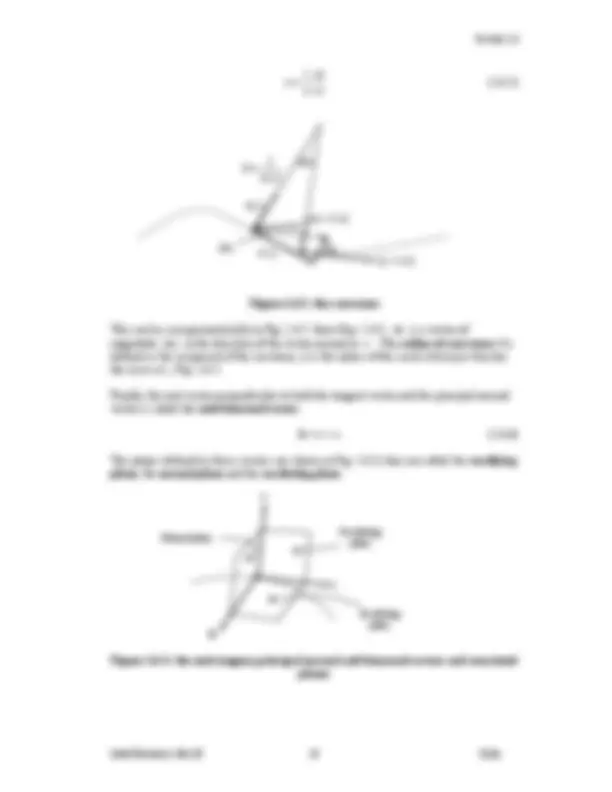
Finally, the unit vector perpendicular to both the tangent vector and the principal normal
vector is called the unit binormal vector :
b τ ν (1.6.6)
The planes defined by these vectors are shown in Fig. 1.6.3; they are called the rectifying
plane , the normal plane and the osculating plane.
Figure 1.6.3: the unit tangent, principal normal and binormal vectors and associated
planes
τ ( s )
s
R
τ ( s ds )
τ
ν ( s )
ν ( s ds )
s
s
τ
ν
b
Normal plane
Osculating
plane
Rectifying
plane
Rules of Differentiation
The derivative of a vector is also a vector and the usual rules of differentiation apply,
dt
d
dt
d t dt
d
dt
d
dt
d
dt
d
v
v v
u v u v
Also, it is straight forward to show that {▲Problem 2}
a
a v a v a v
a v v a v dt
d
dt
d
dt
d
dt
d
dt
d
dt
d (1.6.8)
(The order of the terms in the cross-product expression is important here.)
1.6.3 Fields
In many applications of vector calculus, a scalar or vector can be associated with each
point in space x. In this case they are called scalar or vector fields. For example
( x ) temperature^ a scalar field (a scalar-valued function of position)
v ( x ) velocity a vector field (a vector valued function of position)
These quantities will in general depend also on time, so that one writes ( x , t )or v ( x , t ).
Partial differentiation of scalar and vector fields with respect to the variable t is
symbolised by / t. On the other hand, partial differentiation with respect to the
coordinates is symbolised by / xi. The notation can be made more compact by
introducing the subscript comma to denote partial differentiation with respect to the
coordinate variables, in which case (^) , i / xi , ui (^) jk ui / xj xk
2 , , and so on.
1.6.4 The Gradient of a Scalar Field
Let ( x )be a scalar field. The gradient of is a vector field defined by (see Fig. 1.6.4)
x
e
e e e
i xi
x x x
3 3
2 2
1 1
Gradient of a Scalar Field (1.6.9)
The gradient is of considerable importance because if one takes the dot product of
with d x^ , it gives the increment in :
(iii) the direction of zero d is in the direction perpendicular to
Figure 1.6.5: gradient of a temperature field
The curves x 1 , x 2 const.are called isotherms (curves of constant temperature). In
general, they are called iso-curves (or iso-surfaces in three dimensions).
■
Many physical laws are given in terms of the gradient of a scalar field. For example,
Fourier’s law of heat conduction relates the heat flux q (the rate at which heat flows
through a surface of unit area
3 ) to the temperature gradient through
q k (1.6.13)
where k is the thermal conductivity of the material, so that heat flows along the direction
normal to the isotherms.
The Normal to a Surface
In the above example, it was seen that points in the direction normal to the curve
const. Here it will be seen generally how and why the gradient can be used to obtain
a normal vector to a surface.
Consider a surface represented by the scalar function f^ (^ x 1 , x 2 , x 3 ) c ,^ c^ a constant^
(^4) , and
also a space curve C lying on the surface, defined by the position vector
r x 1 (^) ( t ) e 1 x 2 ( t ) e 2 x 3 ( t ) e 3. The components of r must satisfy the equation of the
surface, so f ( x 1 ( t ), x 2 ( t ), x 3 ( t )) c. Differentiation gives
3
3
2
2
1
1
dt
dx
x
f
dt
dx
x
f
dt
dx
x
f
dt
df
(^3) the flux is the rate of flow of fluid, particles or energy through a given surface; the flux density is the flux
per unit area but, as here, this is more commonly referred to simply as the flux
(^4) a surface can be represented by the equation f ( x , x , x ) c 1 2 3 ; for example, the expression
4
2 3
2 2
2 x 1 (^) x x is the equation for a sphere of radius 2 (with centre at the origin). Alternatively, the
surface can be written in the form x (^) 3 g ( x 1 , x 2 ), for example
2 2
2 x 3 (^) 4 x 1 x
which is equivalent to the equation grad f d r / dt 0 and, as seen in §1.6.2, d r / dt is a
vector tangential to the surface. Thus grad f is normal to the tangent vector; grad f must
be normal to all the tangents to all the curves through p , so it must be normal to the plane
tangent to the surface.
Taylor’s Series
Writing as a function of three variables (omitting time t ), so that ( x 1 , x 2 , x 3 ), then
can be expanded in a three-dimensional Taylor’s series:
2 2 1 1
2
3 3
2 2
1 1
1 1 2 2 3 3 1 2 3
dx x
dx x
dx x
dx x
x dx x dx x dx x x x
Neglecting the higher order terms, this can be written as
x x
x d x x d
which is equivalent to 1.6.9, 1.6.10.
1.6.5 The Nabla Operator
The symbolic vector operator is called the Nabla operator
5
. One can write this in
component form as
i
i x x x x
e e e e
3
3 2
2 1
One can generalise the idea of the gradient of a scalar field by defining the dot product
and the cross product of the vector operator with a vector field , according to the
rules
i
i i
i x x
e , e (1.6.15)
The following terminology is used:
u u
u u
curl
div
grad
(^5) or del or the Gradient operator
with the partial derivatives evaluated at ( x 1 , x 2 , x 3 ), so the volume flux out is
3
1 2 3
1
2
1 2 2
1
1
1 2 3 1 (^1 , 2 , 3 ) 1 x
v x x
v x x
v x x v x x x x
Figure 1.6.6: a differential element; (a) flow through a face, (b) volume of material
flowing through the face
The net volume flux out (rate of volume flow out through the right-hand face minus the
rate of volume flow in through the left-hand face) is then x 1 x 2 x 3 v 1 / x 1 and the net
volume flux per unit volume is v 1 (^) / x 1. Carrying out a similar calculation for the other
two coordinate directions leads to
net unit volume flux out of an elemental volume : div v
3
3
2
2
1
1
x
v
x
v
x
v (1.6.18)
which is the physical meaning of the divergence of the velocity field.
If div v 0 , there is a net flow out and the density of material is decreasing. On the other
hand, if div v 0 , the inflow equals the outflow and the density remains constant – such a
material is called incompressible
9
. A flow which is divergence free is said to be
isochoric. A vector v for which div v 0 is said to be solenoidal.
Notes:
The above result holds only in the limit when the element shrinks to zero size – so that
the extra terms in the Taylor series tend to zero and the velocity field varies in a linear
fashion over a face
consider the velocity at a fixed point in space, v x ( , ) t. The velocity at a later time,
v x ( , t t ), actually gives the velocity of a different material particle. This is shown in
Fig. 1.6.7 below: the material particles 1 , 2 , 3 are moving through space and whereas
v ( x , t )represents the velocity of particle 2, v x ( , t t )now represents the velocity of
particle 1, which has moved into position x. This point is important in the consideration
of the kinematics of materials, to be discussed in Chapter 2
(^9) a liquid , such as water, is a material which is incompressible
( x 1 , x 2 , x 3 ) v 1 (^) ( x 1 x 1 , x 2 , x 3 ) x 1
x 2
v 1 (^) ( x 1 x 1 , x 2 , x 3 x 3 )
v 1 (^) ( x 1 x 1 , x 2 x 2 , x 3 x 3 )
v 1 (^) ( x 1 x 1 , x 2 x 2 , x 3 )
x 3
v ave
(a) (b)
Figure 1.6.7: moving material particles
Another example would be the divergence of the heat flux vector q. This time suppose
also that there is some generator of heat inside the element (a source ), generating at a rate
of r per unit volume, r being a scalar field. Again, assuming the element to be small, one
takes r to be acting at the mid-point of the element, and one considers ( 2 1 , )
1 r x 1 x .
Assume a steady-state heat flow, so that the (heat) energy within the elemental volume
remains constant with time – the law of balance of (heat) energy then requires that the net
flow of heat out must equal the heat generated within, so
3
2 3
1
2
2 2
1
1
2 1
1 1 2 3 1 2 3
3
3 1 2 3 2
2 1 2 3 1
1 1 2 3
x
r x x
r x x
r x x x rx x x x
x
q x x x x
q x x x x
q x x x
Dividing through by x 1 (^) x 2 x 3 and taking the limit as x 1 (^) , x 2 , x 3 0 , one obtains
div q r (1.6.19)
Here, the divergence of the heat flux vector field can be interpreted as the heat generated
(or absorbed) per unit volume per unit time in a temperature field. If the divergence is
zero, there is no heat being generated (or absorbed) and the heat leaving the element is
equal to the heat entering it.
1.6.7 The Laplacian
Combining Fourier’s law of heat conduction (1.6.13), q k , with the energy
balance equation (1.6.19), div q r , and assuming the conductivity is constant, leads to
k r. Now
2 3
2
2 2
2
2 1
2
2
2
x x x
x x x x xi
ij i j
j i j
i
e e
1 2 3
x x x^ x x
time t
time t t
v ( x , t )
v ( x , t t )
field. The paddle wheel would remain stationary in regions where curl v 0 , in which
case the velocity field v is called irrotational.
1.6.9 Identities
Here are some important identities of vector calculus {▲Problem 8}:
u v u v
u v u v
curl curl curl
div div div
grad grad grad
div grad grad grad
divcurl 0
curlgrad
div curl curl
curl curl grad
div div grad
grad( ) grad grad
2
u
o
u v v u u v
u u u
u u u
1.6.10 Cylindrical and Spherical Coordinates
Cartesian coordinates have been used exclusively up to this point. In many practical
problems, it is easier to carry out an analysis in terms of cylindrical or spherical
coordinates. Differentiation in these coordinate systems is discussed in what follows
10 .
Cylindrical Coordinates
Cartesian and cylindrical coordinates are related through (see Fig. 1.6.8)
z z
y r
x r
sin
cos
z z
y x
r x y
tan /
1
2 2
Then the Cartesian partial derivatives become
y r y r r
r
y
x r x r r
r
x
cos sin
sin cos
(^10) this section also serves as an introduction to the more general topic of Curvilinear Coordinates covered
in §1.16-§1.
Figure 1.6.8: cylindrical coordinates
The base vectors are related through
z z
y r
x r
e e
e e e
e e e
sin cos
cos sin
z z
x y
r x y
e e
e e e
e e e
sin cos
cos sin
so that from Eqn. 1.6.14, after some algebra, the Nabla operator in cylindrical coordinates
reads as {▲Problem 9}
r r z
r z
e e e
which allows one to take the gradient of a scalar field in cylindrical coordinates:
r z r r z
e e e
Cartesian base vectors are independent of position. However, the cylindrical base
vectors, although they are always of unit magnitude, change direction with position. In
particular, the directions of the base vectors e r , e depend on , and so these base
vectors have derivatives with respect to : from Eqn. 1.6.29,
r
r
e e
e e
with all other derivatives of the base vectors with respect to r , , z equal to zero.
The divergence can now be evaluated:
x (^) 1 x
x (^) 2 y
x (^) 3 z
x , y , z r , , z
r^
e x
e z
e y
e z
e r
e
r
r
e e
e e
,
e e e
e e
e e
sin cos
cos
sin
r
r
and it can then be shown that {▲Problem 11}
2
2
2 2 2 2
2
2 2
2 2
2 2
sin
2 1 cot 1
sin
sin sin
sin
r r r r r r
v
r
v r
r v r r
r r r
r
r
v
e e e
1.6.11 The Directional Derivative
Consider a function x. The directional derivative of in the direction of some vector
w is the change in in that direction. Now the difference between its values at position
x and x w is, Fig. 1.6.10,
d ^ ^ x w ^ x (1.6.39)
Figure 1.6.10: the directional derivative
x
w
( x )
( x w )
D w ( x )
An approximation to d can be obtained by introducing a parameter and by
considering the function x w ; one has x w 0 x and
x w 1 x w .
If one treats as a function of , a Taylor’s series about 0 gives
(^) 0
2
2 2
d
d
d
d
or, writing it as a function of x w ,
x w x x w
0
d
d
By setting 1 , the derivative here can be seen to be a linear approximation to the
increment d , Eqn. 1.6.39. This is defined as the directional derivative of the function
( x )at the point x in the direction of w , and is denoted by
x w ^ x^ w
0
[ ]
d
d The Directional Derivative (1.6.40)
The directional derivative is also written as D w x .
The power of the directional derivative as defined by Eqn. 1.6.40 is its generality, as seen
in the following example.
Example (the Directional Derivative of the Determinant)
Consider the directional derivative of the determinant of the 2 2 matrix A , in the
direction of a second matrix T (the word “direction” is obviously used loosely in this
context). One has
11 22 2211 12 21 2112
11 11 22 22 12 12 21 21 0
0
det [ ] det
A T A T AT A T
A T A T A T A T
d
d
d
d
A A T A^ T
The Directional Derivative and The Gradient
Consider a scalar-valued function of a vector z. Let z be a function of a parameter ,
z 1 , z 2 , z 3 . Then
A field is a function which is defined in a Euclidean (point) space
3 E. A scalar field is
then a function f E R
3 :. A scalar field is differentiable at a point
3 x E if there
exists a vector Df x E such that
f x h f x Df x h o h for all h E (1.6.46)
In that case, the vector Df x is called the derivative (or gradient ) of f at x (and is given
the symbol f x ).
Now setting h w in 1.6.46, where w E is a unit vector, dividing through by and
taking the limit as 0 , one has the equivalent statement
x w x w
(^)
f d
d f
0
for all w E (1.6.47)
which is 1.6.41. In other words, for the derivative to exist, the scalar field must have a
directional derivative in all directions at x.
Using the chain rule as in §1.6.11, Eqn. 1.6.47 can be expressed in terms of the Cartesian
basis e i ,
i j j
i
i i
w x
f w x
f f x w e e
This must be true for all w and so, in a Cartesian basis,
i
xi
f f x e
which is Eqn. 1.6.9.
1.6.13 Problems
- A particle moves along a curve in space defined by
(^3)
2 3 2
2 1
3 r t 4 t e t 4 t e 8 t 3 t e
Here, t is time. Find
(i) a unit tangent vector at t 2
(ii) the magnitudes of the tangential and normal components of acceleration at t 2
2. Use the index notation (1.3.12) to show that a
a v v a v dt
d
dt
d
dt
d
. Verify this
result for (^12)
2 3
2 v 3 t e (^) 1 t e , a t e t e. [Note: the permutation symbol and the unit
vectors are independent of t ; the components of the vectors are scalar functions of t
which can be differentiated in the usual way, for example by using the product rule of
differentiation.]
3. The density distribution throughout a material is given by 1 x x.
(i) what sort of function is this?
(ii) the density is given in symbolic notation - write it in index notation
(iii) evaluate the gradient of
(iv) give a unit vector in the direction in which the density is increasing the most
(v) give a unit vector in any direction in which the density is not increasing
(vi) take any unit vector other than the base vectors and the other vectors you used
above and calculate d / dx in the direction of this unit vector
(vii) evaluate and sketch all these quantities for the point (2,1).
In parts (iii-iv), give your answer in (a) symbolic, (b) index, and (c) full notation.
- Consider the scalar field defined by x 3 yx 2 z
2
(i) find the unit normal to the surface of constant at the origin (0,0,0)
(ii) what is the maximum value of the directional derivative of at the origin?
(iii) evaluate d / dx at the origin if d x ds ( e 1 e 3 ).
- If u x 1 (^) x 2 x 3 e 1 x 1 x 2 e 2 x 1 e 3 , determine div u and curl u.
- Determine the constant a so that the vector
v x 1 3 x 2 e 1 x 2 2 x 3 e 2 x 1 ax 3 e 3
is solenoidal.
- Show that curl v 2 ω (see also Problem 9 in §1.1).
- Verify the identities (1.6.25-26).
- Use (1.6.14) to derive the Nabla operator in cylindrical coordinates (1.6.30).
- Derive Eqn. (1.6.34), the curl of a vector and the Laplacian of a scalar in the
cylindrical coordinates.
- Derive (1.6.38), the gradient, divergence and Laplacian in spherical coordinates.
12. Show that the directional derivative D v ( u )of the scalar-valued function of a vector
( u ) u u , in the direction v , is 2 u v.
- Show that the directional derivative of the functional
l l
dx pxvxdx dx
d v Uvx EI
0 0
2
2
2
( )( ) 2
in the direction of ( x )is given by
l l
dx px xdx dx
d x
dx
d vx EI
0 0
2
2
2
2
( ) ()