


Orijentacija fotogrametrijskih
snimaka
Fotogrametrija i daljinska detekcija



















Studirajte zahvaljujući brojnim resursima koji su dostupni na Docsity-u

Zaradite bodove pomažući drugim studentima ili ih kupite uz Premium plan

Pripremite ispite
Studirajte zahvaljujući brojnim resursima koji su dostupni na Docsity-u
Nabavite poene za preuzimanje
Zaradite bodove pomažući drugim studentima ili ih kupite uz Premium plan
Fotogrametrija, planiranje fotogrametrijskog snimanja
Tipologija: Slajdovi
1 / 39

Ova stranica nije vidljiva u pregledu
Ne propustite važne delove!
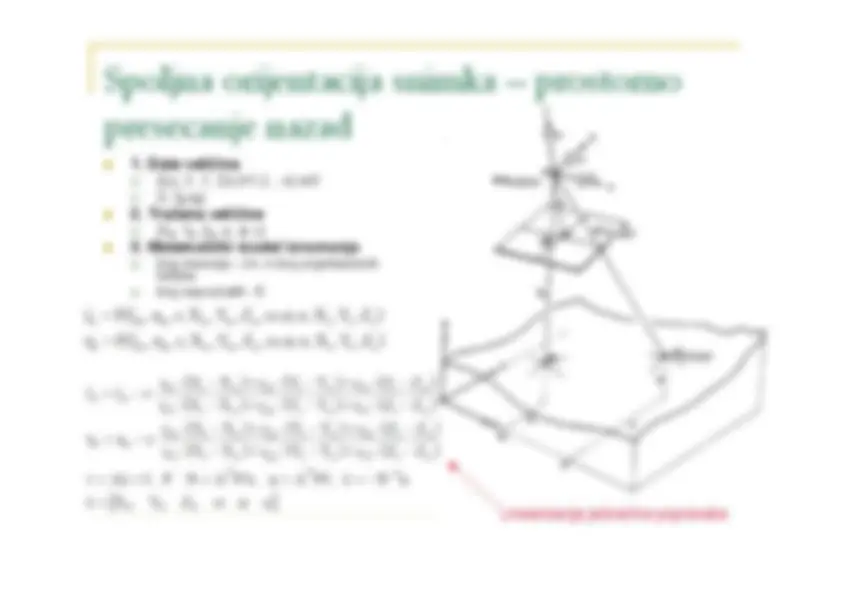
Spoljna orijentacija snimka – prostorno presecanje nazad
(ξ,η, X, Y, Z)i (i=1,2,...n) n≥ 3 (c, ξ 0 ,η 0 )
(X 0 , Y 0 , Z 0 , ω, ϕ, κ)
broj merenja – 2n, n broj orijentacionih tačaka broj nepoznatih - 6
Spoljna orijentacija prostornim presecanjem nazad – jednovremeno određivanje 12 elemenata SO Neophodno je određivanje približnih vrednosti za elemente spoljne orijentacije Kod primene za određivanje elementa spoljne orijentacije za stereopar ne koristi se informacija da se homologni zrakovi međusobno seku u tačkama objekta Za svaki snimak potrebne su najmanje 3 orijentacione tačke sa poznatim koordinatama X,Y i Z Postupak orijentacije stereopara ne može se koristiti kod analognih fotogrametrijskih instrumenata
Spoljna orijentacija stereopara – dva koraka (relativna i apsolutna orijentacija) Koristi se informacija da se homologni zrakovi međusobno seku u tačkama objekta ( relativna orijentacija, 5 elemenata) Potrebne su najmanje 2 orijentacione tačke sa poznatim koordinatama X,Y i Z i jedna orijentaciona tačka sa poznatom Z koordinatom ( apsolutna orijentacija, 7 elemenata) Postupak orijentacije stereopara se može koristiti kod analognih fotogrametrijskih instrumenata
Relativna orijentacija – numerički postupak sa modelskim koordinatama za približno vertikalne snimke (empirijska orijentacija na analognom fotogrametrijskom instrumentu
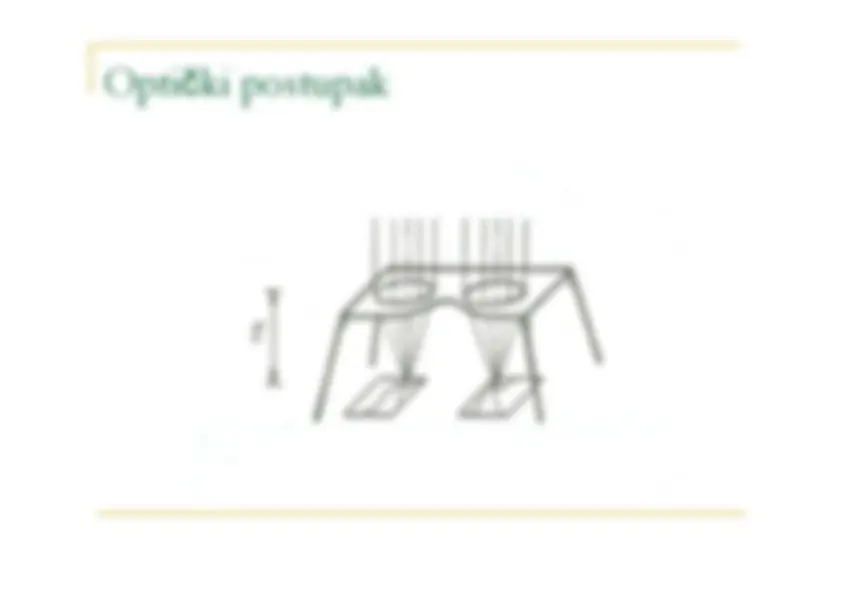
Empirijska relativna orijentacija stereopara na analognom fotogrametrijskom instrumentu – optičkomehanički postupak
eliminacija y-paralakse u tački rotacijom projektora, poništavanje y-paralakse u sledećoj tački bez uvođenja nove paralakse u prethodnoj tački nastavljanje procedure dok se ne eliminišu y-paralakse u bar 5 dobro raspoređenih tačaka pre poništavanja y-paralakse u nekoj tački poništava se x-paralaksa u toj tački Paralakse se poništavaju u Gruberovim tačkama