Nur auf Docsity: Lade 6 Integration und mehr Leitfäden, Projektarbeiten und Recherchen als PDF für Integralrechnung herunter!
6 Integration
Die Integration von Funktionen ist historisch entstanden, um Flächeninhalte von krumm-
linig berandeten Gebieten bestimmen zu können. Dabei misst man mit dem Integral die
Fläche zwischen der x-Achse und dem Funktionsgraphen. Durch die bahnbrechenden
Arbeiten von Leibniz und Newton wurde zudem der Zusammenhang zwischen Integra-
tion und Differentiation hergestellt und man kann die Integration in gewissem Sinne als
Umkehrung der Diffentiation auffassen.
f (x)
x a (^) b
F =
Z^ b
a
f (x) dx
Abbildung 6.1: Das Integral F als Flächeninhalt zwischen der x-Achse und dem Graph
einer Funktion f : [a, b]! R
6.1 Zerlegungen und Flächeninhalte
Der Flächeninhalt eines Rechtecks berechnet sich sehr leicht als das Produkt von Höhe
mal Breite. Daher liegt es Nahe den Begriff des Integrals zunächst für Treppenfunktionen
zu definieren. Bei diesen kann man nämlich die Fläche unterhalb des Graphens als Sum-
me der Fläche von Rechtecken einfach aufsummieren. Dazu sei zunächst die Zerlegung
eines Intervalls und die Menge der Treppenfunktionen erneut präzisiert.
Definition 6.1 (Unterteilung)
Sind zu einem Intervall I := [a, b] die n + 1 Punkte x (^) i , (0 i n), so angeordnet, dass
6 Integration
gilt
a =: x 0 < x 1 < x 2 <... < x (^) n := b
so nennt man Z := {x 0 , x 1 ,... , x (^) n } eine endliche Unterteilung (oder Zerlegung) des
Intervalls.
Jedes der offenen Intervalle I (^) k := (x (^) k� 1 , x (^) k ), (1 k n) heißt Teilintervall und hat eine
Größe h (^) k := |x (^) k � x (^) k� 1 |. Die maximale Größe aller Teilintervalle
h := h(Z) := max 1 kn
h (^) k := max 1 kn
|x (^) k � x (^) k� 1 |
heißt Feinheit der Unterteilung.
Die Menge aller Zerteilungen des Intervalls [a, b] wird mit Z(a, b) bezeichnet.
x 0 x 1 x (^2)
x (^) n� 1 x (^) n
f (x) := c (^) k , für x 2 (x (^) k� 1 , x (^) k )
Z^ b
a
f (x) dx :=
X^ n
k=
c (^) k · (x (^) k � x (^) k� 1 )
x
f (x)
Abbildung 6.2: Integral für eine Treppenfunktion auf a = x 0 < x 1 < x 2 <... < x (^) n = b
Auf einer Zerteilung eines Intervalls lassen sich Treppenfunktionen definieren.
Definition 6.
Für eine Zerlegung a = x 0 < x 1 < x 2 <... < x (^) n = b ist eine Treppenfunktion stückweise
definiert durch
f (x) := c (^) k für x 2 ( x (^) k� 1 , x (^) k ) , 1 k n,
d.h. es ist diejenige Funktion, die auf dem Teilintervall I (^) k den konstanten Wert c (^) k 2 R
annimmt.
Für Treppenfunktionen erhält man nun direkt den Begriff des Integrals.
6 Integration
a (^) b
f (x)
a (^) b
f (x)
a (^) b
f (x)
a (^) b
f (x)
a (^) b
f (x)
a (^) b
f (x)
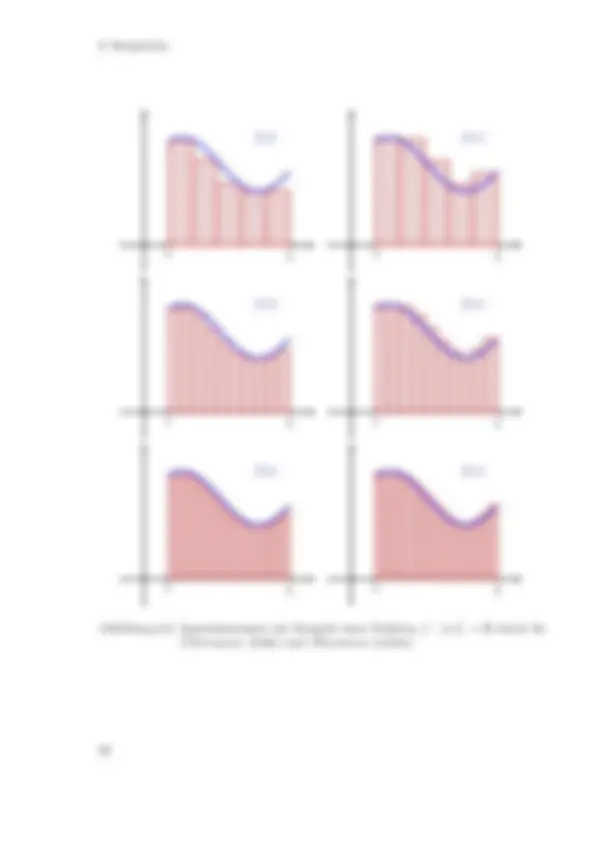
Abbildung 6.3: Approximationen des Integrals einer Funktion f : [a, b]! R durch die
Untersumme (links) und Obersumme (rechts)
6.2 Riemann-Integral
Anschaulich gesprochen wird die Approximation der Integrationsfläche immer besser, je
feiner die Zerlegung gewählt wird. Den Zusammenhang zwischen den Ober-/Untersummen
und Ober-/Unterintegralen für beliebig feine Zerlegungen stellt die folgende Aussage dar.
Satz 6.
Für eine beschränkte Funktion f : [a, b]! R existieren Ober-/Untersumme für alle
Zerlegungen und für jede Folge von Zerlegungen (Z (^) n ) (^) n 2 N , Zn 2 Z(a, b) mit Feinheit
h (^) n := h(Z (^) n )! 0 , (n! 1) gilt:
lim n!
S(Z (^) n , f ) =
Z
b
a
f (x) dx
Z
b
a
f (x) dx = lim n!
S(Z (^) n , f ).
Beweis. Da die Funktion f beschränkt ist, existieren untere Schranken inf (^) x 2 [a,b] f (x)
und obere Schranken sup (^) x 2 [a,b] f (x) und die die Abschätzungen
inf x 2 [a,b]
f (x) · (b � a) S(Z (^) n , f ) S(Z (^) n , f ) sup x 2 [a,b]
f (x) · (b � a)
folgt direkt aus der Definition von Infimum und Supremum. Damit sind auch Ober- und
Untersumme beschränkt.
Für die zweite Behauptung sei nun (Z (^) n ) (^) n 2 N , Zn 2 Z(a, b) eine Folge von Zerlegungen
mit Feinheit h (^) n := h(Z (^) n )! 0 , (n! 1). Gemäß der Definition über Supremum und
Infimum gibt es zu jedem ✏ > 0 Zerlegungen Z (^) ✏ , Z
✏ mit
Z (^) b
a
f (x) dx S(Z (^) ✏ , f ) +
, S(Z
✏ , f )
Z (^) b
a
f (x) dx +
Nun hat jedoch jede der beiden Zerlegungen Z (^) ✏ , Z
✏ nur endlich viele Teilungspunkte.
Daher kann man die Feinheit h (^) n so fein wählen (d.h. n so groß), dass die gesamte Länge
der Intervalle von Z (^) n , die einen Teillungspunkt von Z (^) ✏ oder Z
✏ enthalten insgesamt
kleiner als M
✏ 2
mit M := sup (^) x 2 [a,b] |f (x)| wird und daher gilt:
S(Z (^) ✏ , f ) S(Z (^) n , f ) +
S(Z
n , f ) S(Z
✏ , f ) +
und somit zu jedem ✏ > 0 ein n 2 N existiert, so dass
Z (^) b
a
f (x) dx S(Z (^) n , f ) + ✏, S(Z
n , f )
Z (^) b
a
f (x) dx + ✏.
Beispiel 6.
Sei f : [0, b]! R, f (x) := x gegeben. Auf jedem Teilintervall (x (^) k� 1 , x (^) k ) einer Zerlegung
ist das Supremum von f (x) = x durch x (^) k gegeben und das Infimum durch x (^) k� 1. Bildet
6.2 Riemann-Integral
Definition 6.9 (Riemannsches Integrationskriterium)
Eine beschränkte Funktion f : [a, b]! R ist genau dann Riemann-integrierbar, wenn es
zu jedem ✏ > 0 eine Zerlegung Z gibt, so dass die Unter- und Obersumme sich höchstens
um ✏ unterscheiden, d.h.
|S(Z, f ) � S(Z, f )| < ✏.
Mittels dieses Kriteriums lässt sich nun die Integrierbarkeit von stetigen Funktionen
untersuchen. Dazu benötigt man zunächst die folgende Verschärfung der Stetigkeit.
Satz 6.10 (Gleichmäßige Stetigkeit)
Sei [a, b] ⇢ R ein abgeschlossenes, beschränktes Intervall. Dann ist jede stetige Funktion
f : [a, b]! R sogar gleichmäßig stetig, d.h. zu jedem ✏ > 0 gibt es ein � (^) ✏ > 0 , so dass für
alle x, x
0 2 [a, b] gilt:
|x � x
0 | < � (^) ✏ ) |f (x) � f (x
0 )| < ✏.
Beweis. Widerspruchsbeweis. Angenommen, f ist nicht gleichmäßig stetig. Dann gibt
es ein ✏ > 0 so, dass für alle n 2 N Punkte x (^) n , x
0 n 2 [a, b]^ derart existieren, dass gilt
|x (^) n � x
0 n |^ <^
n
, aber |f (x (^) n ) � f (x
0 n )|^ �^ ✏.
Nach dem Satz von Bolzano-Weierstraß besitzt die beschränkte Folge (x (^) n ) (^) n 2 N (denn
das Intervall ist beschränkt) eine konvergente Teilfolge (x (^) n (^) k ) (^) k 2 N mit einem Grenzwert
x 2 [a, b]. Dies ist auch der Grenzwert der Folge (x
0 n (^) k )^ k^2 N^ , denn es gilt^ |x^ n^ �^ x^
0 n |^ <^
1 n
Somit folgt wegen der Stetigkeit von f
|f (x (^) n (^) k ) � f (x
0 n (^) k )|^!^ |f^ (x)^ �^ f^ (x)|^ = 0,^ (k^! 1),
im Widerspruch zu |f (x (^) n ) � f (x
0 n )|^ �^ ✏.
Der Unterschied zwischen Stetigkeit und gleichmäßiger Stetigkeit besteht darin, dass
man für stetige Funktionen die �-Umgebung bei jedem Punkt unterschiedlich wäh-
len darf. Bei gleichmäßig stetigen Funktionen hingegen muss man zu jedem ✏ die �-
Umgebung für alle Punkte im Definitionsbereich simultan wählen können.
Satz 6.11 (Stetige Funktionen sind Riemann-integrierbar)
Jede stetig Funktion f : [a, b]! R ist Riemann-integrierbar.
Beweis. Auf dem abgeschlossenen, beschränkten Intervall ist die Funktion gleichmäßig
stetig, d.h. es gibt zu jedem ✏ > 0 ein � (^) ✏ > 0 , so das gilt
|x � x
0 | < � (^) ✏ ) |f (x) � f (x
0 )| < ✏.
Daher kann man nun jede Zerlegung Z 2 Z(a, b) wählen, die eine Feinheit h < � (^) ✏ besitzt.
Denn dann gilt
|S(Z, f ) � S(Z, f )|
n X
k=
| sup x 2 I (^) k
f (x) � inf x 2 I (^) k
f (x)|(x (^) k � x (^) k� 1 ) ✏
n X
k=
(x (^) k � x (^) k� 1 ) = ✏(b � a).
6 Integration
Satz 6.12 (Monotone Funktionen sind Riemann-integrierbar)
Jede beschränkte, monotone Funktion f : [a, b]! R ist Riemann-integrierbar.
Beweis. Sei f monoton steigend (monoton fallend analog). Dann gilt f (a) f (x)
f (b) für alle x 2 [a, b]. Wählt man eine Zerlegung mit Feinheit h, so folgt
S(Z, f ) � S(Z, f ) =
n X
k=
(sup x 2 I (^) k
f (x) � inf x 2 I (^) k
f (x))(x (^) k � x (^) k� 1 )
X^ n
k=
(f (x (^) k ) � f (x (^) k� 1 ))(x (^) k � x (^) k� 1 )
h
X^ n
k=
(f (x (^) k ) � f (x (^) k� 1 )) = h (f (b) � f (a)).
Somit lässt sich zu jedem ✏ > 0 eine Zerlegung mit h (^) ✏ :=
✏ f (b)�f (a)
wählen.
Für die Ermittelung des Wertes muss man sich nicht einmal auf Ober- und Untersummen
festlegen, sondern kann den Wert der Funktion irgendwo innerhalb der Teilintervalle
auswerten. Dies ist definiert als Riemannsche Summe.
Definition 6.13 (Riemannsche Summe)
Sei f : [a, b]! R und Z 2 Z(a, b). Wählt man in jedem Intervall I (^) k der Zerlegung einen
Punkt ⇠ (^) k 2 (x (^) k� 1 , x (^) k ) = I (^) k , so bezeichnet man die Summe
S(Z, f ) :=
n X
k=
f (⇠ (^) k ) · (x (^) k � x (^) k� 1 )
als Riemannsche Summe von f.
Satz 6.14 (Riemann-Integral über Riemann-Summe)
Eine beschränkte Funktion f : [a, b]! R ist genau dann Riemann-integrierbar, wenn es
für jede Folge von Zerlegungen (Z (^) n ) (^) n 2 N , Zn 2 Z(a, b) mit h (^) n := h(Z (^) n )! 0 , (n! 1)
alle zugehörigen Riemannschen Summen mit demselben Grenzwert konvergieren:
S(Z (^) n , f )!
Z
b
a
f (x) dx (n! 1).
Satz 6.15 (Eigenschaften des Riemann-Integrals)
Seien f, g : [a, b]! R Riemann-integrierbare Funktionen und ↵ 2 R.
(i) (Linearität) Die Funktionen f + g und ↵f sind integrierbar mit
Z (^) b
a
(f + g)(x) dx =
Z (^) b
a
f (x) dx +
Z (^) b
a
g(x) dx,
Z (^) b
a
(↵f )(x) dx = ↵
Z (^) b
a
f (x) dx.
6 Integration
und im Speziellen
Z (^) b
a
f (x) dx = f (⇠) · (b � a) für ein ⇠ 2 [a, b].
Beweis. Schreibt man m := inf (^) x 2 [a,b] f (x) und M := sup (^) x 2 [a,b] f (x), so gilt direkt mg
f g M g und somit wegen der Monotonie des Integrals
m
Z (^) b
a
g(x) dx
Z (^) b
a
f (x) g(x) dx M
Z (^) b
a
g(x) dx.
Daher gibt es auch einen Wert μ 2 [m, M ] mit
Z (^) b
a
f (x) g(x) dx = μ
Z (^) b
a
g(x) dx,
und nach dem Zwischenwertsatz auch ein ⇠ 2 [a, b] mit f (⇠) = μ. ⇤
6.3 Hauptsatz der Differential- und Integralrechnung
Definition 6.19 (Stammfunktion)
Eine Funktion F : [a, b]! R heißt Stammfunktion (oder unbestimmtes Integral ) zu einer
Funktion f : [a, b]! R, falls F differenzierbar ist und gilt
F
0 (x) = f (x), für alle x 2 [a, b].
Der folgende Satz zeigt, dass am die Integration als Umkehrung der Differentiation
verstehen kann.
Satz 6.20 (Hauptsatz der Differential- und Integralrechnung)
Sei f : [a, b]! R eine stetige Funktion. Dann gilt:
(i) Das bestimmte Riemann-Integral (aufgefasst als eine Funktion der oberen Grenze)
F (x) :=
Z (^) x
a
f (t) dt, x 2 [a, b]
ist eine Stammfunktion von f und jede weitere Stammfunktion unterscheidet sich
von F nur durch eine Konstante.
(ii) Ist F : [a, b]! R eine Stammfunktion von f , so gilt
Z (^) b
a
f (x) dx = F (x)
b
a
:= F (b) � F (a).
6.4 Integrationsregeln
Beweis. (i) Man betrachtet den Differenzenquotienten von F (x):
F (x + h) � F (x)
h
h
✓Z
x+h
a
f (t) dt �
Z (^) x
a
f (t) dt
h
Z (^) x+h
x
f (t) dt.
Nach dem Mittelwertsatz der Integralrechnung gibt es folglich ein ⇠ (^) h 2 [x, x + h] mit
F (x + h) � F (x)
h
h
f (⇠ (^) h )(x + h � x) = f (⇠ (^) h ).
Somit folgt für h! 0 auch ⇠ (^) h! x und mit der Stetigkeit von f :
F
0 (x) = lim h! 0
F (x + h) � F (x)
h
= lim h! 0
f (⇠ (^) h ) = f (x).
Ist G ebenfalls Stammfunktion, so gilt 0 = F
0 � G
0 = (F � G)
0 und F � G ist konstant.
(ii) Sei nun F irgendeine Stammfunktion. Nach Teil (i) ist aber auch
G(x) :=
Z (^) x
a
f (t) dt, G(a) = 0,
Stammfunktion und es gilt F (x) � G(x) = c für eine Konstante c 2 R. Somit folgt
F (b) � F (a) = G(b) + c � G(a) � c = G(b) =
Z (^) b
a
f (t) dt.
Beispiele 6.21 (i) Sei k 2 N, dann gilt
Z (^) b
a
x
k dx =
x
k+
k + 1
b
a
(ii) Für a, b > 0 gilt
Z (^) b
a
x
dx = ln(x)
b
a
(iii) Es gilt
Z (^) b
a
e
x dx = e
x
b
a
6.4 Integrationsregeln
Es gibt einige nützliche Hilfsmittel, um Integral auszuwerten.
6.5 Quadraturformeln
und somit
Z (^) b
a
f ('(t)) · '
0 (t) dt =
Z (^) b
a
(F � ')
0 (t) dt = (F � ')(t)
b
a
= F ('(b)) � F ('(a)) =
Z (^) '(b)
'(a)
f (x)dx.
Beispiele 6.25 (i) Für '(t) := t + c mit einer Konstanten c 2 R gilt wegen '
0 (t) = 1
Z (^) b
a
f (t + c) dt =
Z (^) b
a
f ('(t)) · '
0 (t) dt =
Z (^) '(b)
'(a)
f (x) dx =
Z (^) b+c
a+c
f (x) dx
(ii) Für '(t) := c · t mit einer Konstanten c 6 = 0 gilt wegen '
0 (t) = c
Z
b
a
f (ct) dt =
c
Z
b
a
f ('(t)) · '
0 (t) dt =
c
Z
'(b)
'(a)
f (x) dx =
c
Z
cb
ca
f (x) dx
(iii) Sei ' : [a, b]! R stetig differenzierbar mit '(x) > 0 für alle x 2 [a, b]. Dann gilt
mit f (x) =
1 x
Z (^) b
a
0 (t)
'(t)
dt =
Z (^) b
a
f ('(t)) · '
0 (t) dt =
Z (^) '(b)
'(a)
x
dx = ln(x)
'(b)
'(a)
= ln('(t))
b
a
6.5 Quadraturformeln
Durch Quadraturformeln möchte man Integrale approximativ ausrechnen. Dazu möchte
man nur geeignet gewichtete Funktionsauswertungen verwenden und auch die Größe des
Approximationsfehlers kennen. Man sucht also eine Formel, so dass sich das Integral
schreiben lässt als
Z (^) b
a
f (x) dx =
n X
k=
w (^) k f (x (^) k ) + R,
wobei w (^) k 2 R Koeffizienten und die x (^) k 2 [a, b] Auswertungspunkte sind. Den Restterm
R bezeichnet man als Approximationsfehler. Solche Formeln lassen sich dann verwenden,
um numerisch den Wert des Integrals hinreichend genau mit dem Computer anzunähern.
Formeln dieser Art erhält man, indem man das Intervall [a, b] in Teilabschnitte zerlegt
und auf jedem dieser Abschnitte eine einfach Auswertungsregel anwendet. Daher wird
zunächst eine Auswertungsregel für ein einzelnes Intervall [0, 1] betrachtet. Diese Regel
kann dann später über die Substitutionsregel auf beliebige Teilabschnitte übertragen
werden.
6 Integration
Rechtecksregel
Satz 6.26 (Boxregel)
Sei f : [0, 1]! R einmal stetig differenzierbar. Dann gibt es ein ⇠ 2 [0, 1], so dass
Z (^1)
0
f (x) dx = f (1) �
f
0 (⇠).
Analog gibt es ein ⇠ 2 [0, 1] mit
Z (^1)
0
f (x) dx = f (0) +
f
0 (⇠).
Beweis. Wählt man g(x) := x, so gilt für die Ableitungen g
0 (x) = 1. Integriert man
nun partiell, so findet man
Z (^1)
0
f (x) dx =
Z 1
0
g
0 (x)f (x) dx = g(x)f (x)
1
0
Z 1
0
g(x)f
0 (x) dx = f (1) �
Z 1
0
g(x)f
0 (x) dx.
Da g(x) � 0 für alle x 2 [0, 1], kann man den Mittelwertsatz der Integralrechnung
anwenden und findet somit für ein ⇠ 2 [0, 1], dass gilt
Z
1
0
g(x)f
0 (x) dx = f
0 (⇠)
Z
1
0
g(x) dx = f
0 (⇠)
x
2
1
0
f
0 (⇠).
Für den zweiten Teil wähle man g(x) = 1 � x. ⇤
Mittelpunktsregel
Satz 6.27 (Mittelpunktsregel)
Sei f : [0, 1]! R zweimal stetig differenzierbar. Dann gibt es ein ⇠ 2 [0, 1], so dass
Z (^1)
0
f (x) dx = f (
f
00 (⇠).
Beweis. Gemäß Taylor-Formel lässt sich mit einem ⇠ 2 [0, 1] schreiben
f (x) = f (
) + f
0 (
)(x �
f
00 (⇠)(x �
2 .
Somit folgt:
Z 1
0
f (x) dx =
Z
1
0
f (
) dx +
Z
1
0
f
0 (
)(x �
) dx +
Z
1
0
f
00 (⇠)(x �
2 dx
= f (
Z
1
0
1 dx
| {z }
+f
0 (
Z
1
0
(x �
) dx
| {z }
+f
00 (⇠)
Z
1
0
(x �
2 dx
| {z }
= 241
6 Integration
Für die Unterteilung in n äquidistante Abschnitte mit Feinheit h :=
b�a n
findet man die
summierte Trapezregel
Z (^) b
a
f (x) dx =
f (a) +
n� 1 X
k=
f (a + kh) +
f (b)
h + R
mit einem Restterm der Größe
|R|
K
(b � a)h
2 .
Beweis. Für jedem der Teilabschnitte [a + kh, a + (k + 1)h] lässt sich die Variablen-
transformation '(x) = a + (k + x)h mit '
0 (x) = h anwenden
a+(Zk+1)h
a+kh
f (x) dx =
Z '(1)
'(0)
f (x) dx =
Z 1
0
f ('(x))'
0 (x) dx = h
Z 1
0
f ('(x)) dx
h
(f ('(0)) + f ('(1))) �
h
(f � ')
00 (c)
h
(f (a + kh) + f (a + (k + 1)h)) �
h
3
f
00 (⇠).
mit einem c 2 [0, 1] und einem '(c) =: ⇠ 2 [a + kh, a + (k + 1)h]. Dabei wendet man die
Kettenregel der Ableitung zweimal an, um zu folgern
(f � ')
00 (c) = [f ('(c))]
00 = [f
0 ('(c))]
0 · '
0 (c) = f
00 ('(c)) · '
0 (c) · '
0 (c) = h
2 f
00 ('(c)) = h
2 f
00 (⇠).
Summation über alle Teilintervalle und zusammenfassen gleicher Auswertungspunkte
liefert nun
Z (^) b
a
f (x) dx =
nX� 1
k=
a+(k+1)h Z
a+kh
f (x) dx =
X^ n�^1
k=
h
(f (a + kh) + f (a + (k + 1)h)) �
X^ n�^1
k=
h
3
f
00 (⇠)
f (a) +
n� 1 X
k=
f (a + kh) +
f (b)
h + R.
Die Größe des Restterms ergibt sich aus der Abschätzung
|R| =
n� 1 X
k=
h
3
f
00 (⇠)
h
2
sup axb
|f
00 (x)|
n� 1 X
k=
h =
h
2
K(b � a),
wobei verwendet wird, dass
P (^) n� 1
k=0 h^ =^ n^ ·^ h^ = (b^ �^ a)^ der Länge des Integrationsintervalls
entspricht.
Bemerkung 6.
Die Fehlerabschätzung für den Restterm zeigt, dass die Approximation des Integrals von
zweiter Ordnung ist. Dies bedeutet, dass eine Halbierung von h zu einem Vierteln des
Fehlers führt.
6.5 Quadraturformeln
f (x)
x a (^) b
Abbildung 6.5: Das Integral F einer Funktion f : [a, b]! R approximiert durch die
summierte Trapezregel