


Advanced Finite Element Methods for Engineers
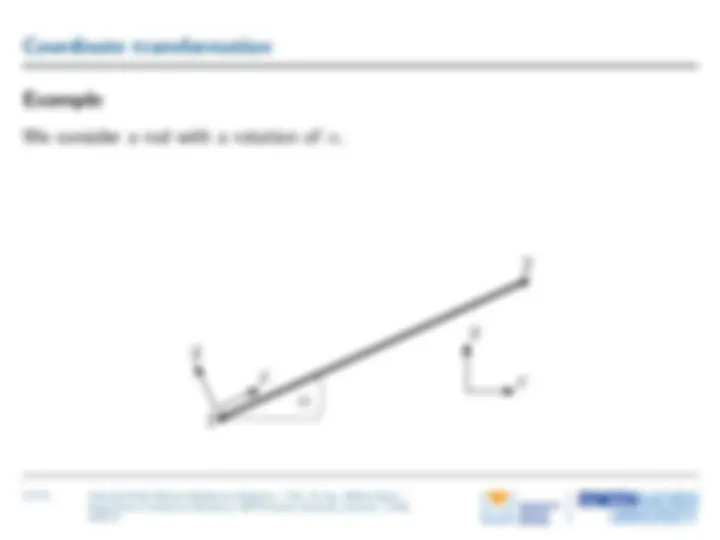
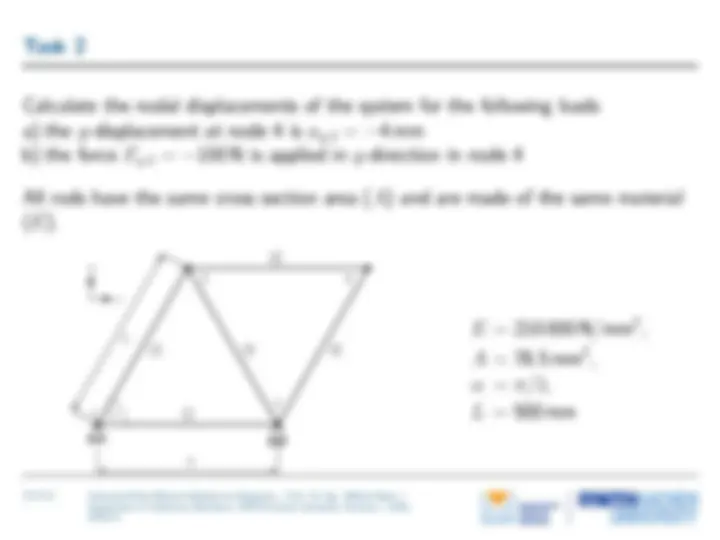
Exercise 2
Prof. Dr.-Ing. Mikhail Itskov
Department of Continuum Mechanics, RWTH Aachen University, Germany
WiSe 2020/21













































Besser lernen dank der zahlreichen Ressourcen auf Docsity

Heimse Punkte ein, indem du anderen Studierenden hilfst oder erwirb Punkte mit einem Premium-Abo

Prüfungen vorbereiten
Besser lernen dank der zahlreichen Ressourcen auf Docsity
Download-Punkte bekommen.
Heimse Punkte ein, indem du anderen Studierenden hilfst oder erwirb Punkte mit einem Premium-Abo
Zweite Übung mit Lösungen von AFEM Kurs
Art: Übungen
1 / 54

Diese Seite wird in der Vorschau nicht angezeigt
Lass dir nichts Wichtiges entgehen!
eT
e
eT
e
eT
e
eT
e
e
e
e
eT
e
e
eT
e
eT
e
eT
e
e
e
e
eT
e
e
eT
e
eT
e
eT
T
T
T
(
T )T
eT
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
eT
e
x
︸ ︷︷ ︸ re
︸ ︷︷ ︸ Le T
1 ,x
1 ,y
2 ,x
2 ,y ︸ ︷︷ ︸ r ¯e
eT
( cos α − sin α 0 0 sin α cos α 0 0 0 0 cos α − sin α 0 0 sin α cos α )
e
( cos α sin α 0 0 − sin α cos α 0 0 0 0 cos α sin α 0 0 − sin α cos α )
( 1 0 − 1 0 0 0 0 0 − 1 0 1 0 0 0 0 0 )
e
e T
( cos(α)^2 cos(α) sin(α) − cos(α)^2 − cos(α) sin(α) cos(α) sin(α) sin(α)^2 − cos(α) sin(α) − sin(α)^2 − cos(α)^2 − cos(α) sin(α) cos(α)^2 cos(α) sin(α) − cos(α) sin(α) − sin(α)^2 cos(α) sin(α) sin(α)^2 )
F 1 x F 1 y F 2 x F 2 y F 3 x F 3 y = K 1 x 1 x K 1 x 1 y K 1 x 2 x K 1 x 2 y K 1 x 3 x K 1 x 3 y K 1 y 1 x K 1 y 1 y K 1 y 2 x K 1 y 2 y K 1 y 3 x K 1 y 3 y K 2 x 1 x K 2 x 1 y K 2 x 2 x K 2 x 2 y K 2 x 3 x K 2 x 3 y K 2 y 1 x K 2 y 1 y K 2 y 2 x K 2 y 2 y K 2 y 3 x K 2 y 3 y K 3 x 1 x K 3 x 1 y K 3 x 2 x K 3 x 2 y K 3 x 3 x K 3 x 3 y K 3 y 1 x K 3 y 1 y K 3 y 2 x K 3 y 2 y K 3 y 3 x K 3 y 3 y a 1 x a 1 y a 2 x a 2 y a 3 x a 3 y = K 1 x 1 x · a 1 x + K 1 x 1 y · a 1 y + K 1 x 2 x · a 2 x + K 1 x 2 y · a 2 y + K 1 x 3 x · a 3 x + K 1 x 3 y · a 3 y K 1 y 1 x · a 1 x + K 1 y 1 y · a 1 y + K 1 y 2 x · a 2 x + K 1 y 2 y · a 2 y + K 1 y 3 x · a 3 x + K 1 y 3 y · a 3 y K 2 x 1 x · a 1 x + K 2 x 1 y · a 1 y + K 2 x 2 x · a 2 x + K 2 x 2 y · a 2 y + K 2 x 3 x · a 3 x + K 2 x 3 y · a 3 y K 2 y 1 x · a 1 x + K 2 y 1 y · a 1 y + K 2 y 2 x · a 2 x + K 2 y 2 y · a 2 y + K 2 y 3 x · a 3 x + K 2 y 3 y · a 3 y K 3 x 1 x · a 1 x + K 3 x 1 y · a 1 y + K 3 x 2 x · a 2 x + K 3 x 2 y · a 2 y + K 3 x 3 x · a 3 x + K 3 x 3 y · a 3 y K 3 y 1 x · a 1 x + K 3 y 1 y · a 1 y + K 3 y 2 x · a 2 x + K 3 y 2 y · a 2 y + K 3 y 3 x · a 3 x + K 3 y 3 y · a 3 y
0 0 100 F 2 y 100 F 3 y = K 1 x 1 x K 1 x 1 y K 1 x 2 x K 1 x 2 y K 1 x 3 x K 1 x 3 y K 1 y 1 x K 1 y 1 y K 1 y 2 x K 1 y 2 y K 1 y 3 x K 1 y 3 y K 2 x 1 x K 2 x 1 y K 2 x 2 x K 2 x 2 y K 2 x 3 x K 2 x 3 y K 2 y 1 x K 2 y 1 y K 2 y 2 x K 2 y 2 y K 2 y 3 x K 2 y 3 y K 3 x 1 x K 3 x 1 y K 3 x 2 x K 3 x 2 y K 3 x 3 x K 3 x 3 y K 3 y 1 x K 3 y 1 y K 3 y 2 x K 3 y 2 y K 3 y 3 x K 3 y 3 y a 1 x a 1 y a 2 x 0 a 3 x 0 = K 1 x 1 x · a 1 x + K 1 x 1 y · a 1 y + K 1 x 2 x · a 2 x + 0 + K 1 x 3 x · a 3 x + 0 K 1 y 1 x · a 1 x + K 1 y 1 y · a 1 y + K 1 y 2 x · a 2 x + 0 + K 1 y 3 x · a 3 x + 0 K 2 x 1 x · a 1 x + K 2 x 1 y · a 1 y + K 2 x 2 x · a 2 x + 0 + K 2 x 3 x · a 3 x + 0 K 2 y 1 x · a 1 x + K 2 y 1 y · a 1 y + K 2 y 2 x · a 2 x + 0 + K 2 y 3 x · a 3 x + 0 K 3 x 1 x · a 1 x + K 3 x 1 y · a 1 y + K 3 x 2 x · a 2 x + 0 + K 3 x 3 x · a 3 x + 0 K 3 y 1 x · a 1 x + K 3 y 1 y · a 1 y + K 3 y 2 x · a 2 x + 0 + K 3 y 3 x · a 3 x + 0
0 0 100 F 2 y 100 F 3 y = K 1 x 1 x K 1 x 1 y K 1 x 2 x K 1 x 2 y K 1 x 3 x K 1 x 3 y K 1 y 1 x K 1 y 1 y K 1 y 2 x K 1 y 2 y K 1 y 3 x K 1 y 3 y K 2 x 1 x K 2 x 1 y K 2 x 2 x K 2 x 2 y K 2 x 3 x K 2 x 3 y K 2 y 1 x K 2 y 1 y K 2 y 2 x K 2 y 2 y K 2 y 3 x K 2 y 3 y K 3 x 1 x K 3 x 1 y K 3 x 2 x K 3 x 2 y K 3 x 3 x K 3 x 3 y K 3 y 1 x K 3 y 1 y K 3 y 2 x K 3 y 2 y K 3 y 3 x K 3 y 3 y a 1 x a 1 y a 2 x 0 a 3 x 0 = K 1 x 1 x · a 1 x + K 1 x 1 y · a 1 y + K 1 x 2 x · a 2 x + 0 + K 1 x 3 x · a 3 x + 0 K 1 y 1 x · a 1 x + K 1 y 1 y · a 1 y + K 1 y 2 x · a 2 x + 0 + K 1 y 3 x · a 3 x + 0 K 2 x 1 x · a 1 x + K 2 x 1 y · a 1 y + K 2 x 2 x · a 2 x + 0 + K 2 x 3 x · a 3 x + 0 K 2 y 1 x · a 1 x + K 2 y 1 y · a 1 y + K 2 y 2 x · a 2 x + 0 + K 2 y 3 x · a 3 x + 0 K 3 x 1 x · a 1 x + K 3 x 1 y · a 1 y + K 3 x 2 x · a 2 x + 0 + K 3 x 3 x · a 3 x + 0 K 3 y 1 x · a 1 x + K 3 y 1 y · a 1 y + K 3 y 2 x · a 2 x + 0 + K 3 y 3 x · a 3 x + 0