


Introduction to
Computer Graphics
Farhana Bandukwala, PhD
Lecture 4: 2D Geometry and
Transformations







Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A part of an introduction to computer graphics lecture series by farhana bandukwala, phd. In this lecture, the focus is on 2d geometry and transformations, including coordinate systems, geometric objects and operations, homogeneous coordinates, and various types of transformations such as translation, scale, and rotation. The lecture also covers the concept of rigid body transformation and affine transformation.
Typology: Assignments
1 / 13

This page cannot be seen from the preview
Don't miss anything!
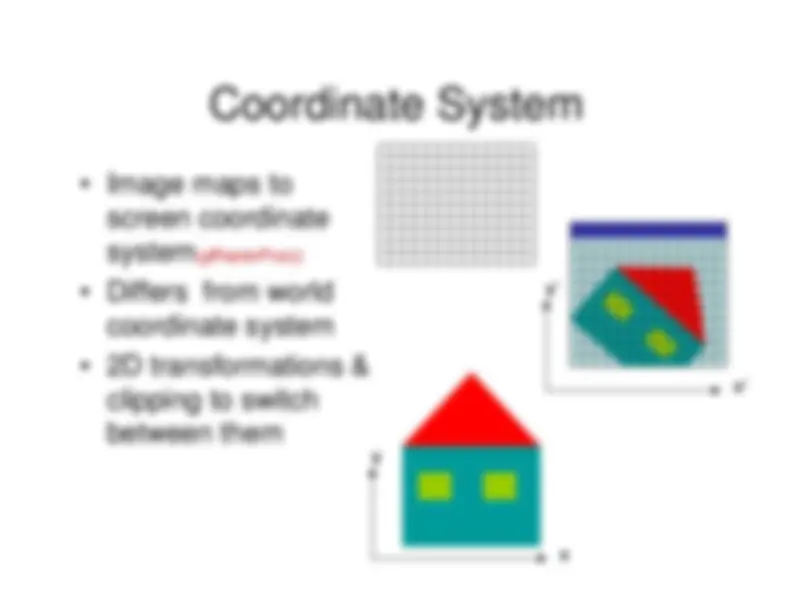
(glRasterPos())
y
x y’
x’
Translate 1 point:P = Q + A
x’ y’
x y
d
x d
y
Define column vectors:
x’ y’
x’ y’
d
x d
y
Vector notation for translation:
Translate objectconsisting ofmultiple points
Shear 1 vector:B
.^
Shear object
x
y’
x y
Define column vectors:
x’ y’
s
x
s
y
x y
Scale equation:x’ = s Matrix notation for scale:
x
x , y’ = s
y
y
x
y’ 1
d
x
d
y
x y 1
Matrix notation for translationusing homogeneous coordinates
Homogeneous coordinates (contd.)
x
y’ 1
s
x
s
y
x y 1
Matrix notation for scale
x’ y’ 1
cos
-sin
sin
cos
x y 1
Matrix notation for rotation
square
Rotation by 45 degrees
Non-uniform scaling