Download 8 Parameters and more Summaries Technology in PDF only on Docsity!
Parameters
8 Parameters
You usually need the parameter menu only for startup and in case of service.
MOVIDRIVE ®^ is therefore designed as a basic unit without keypad. If required, you can
equip the MOVIDRIVE®^ with a PC connection or a keypad.
You can set the MOVIDRIVE®^ parameters in various ways:
- Using the optional keypad type DBG60B.
- Using the MOVITOOLS ®^ MotionStudio engineering software (includes SHELL,
SCOPE and IPOS plus®^ programming).
- Using the serial interfaces.
- Using the fieldbus interfaces.
- Using IPOS plus®.
You can download the latest version of the MOVITOOLS®^ MotionStudio engineering
software from the SEW homepage (www.sew-eurodrive.com).
P
i
f
kVA
Hz
Menu structure in DBG60B
Parameters
8.1 Menu structure in DBG60B
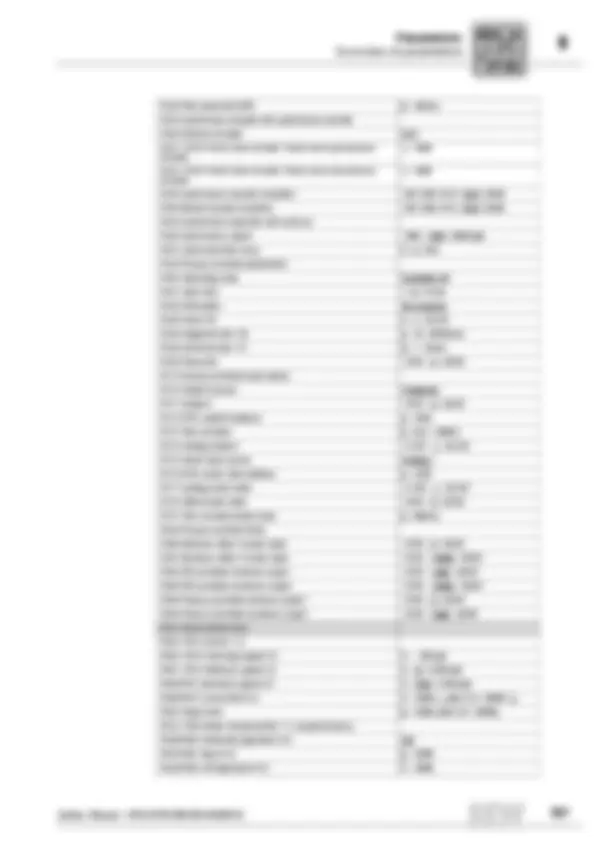
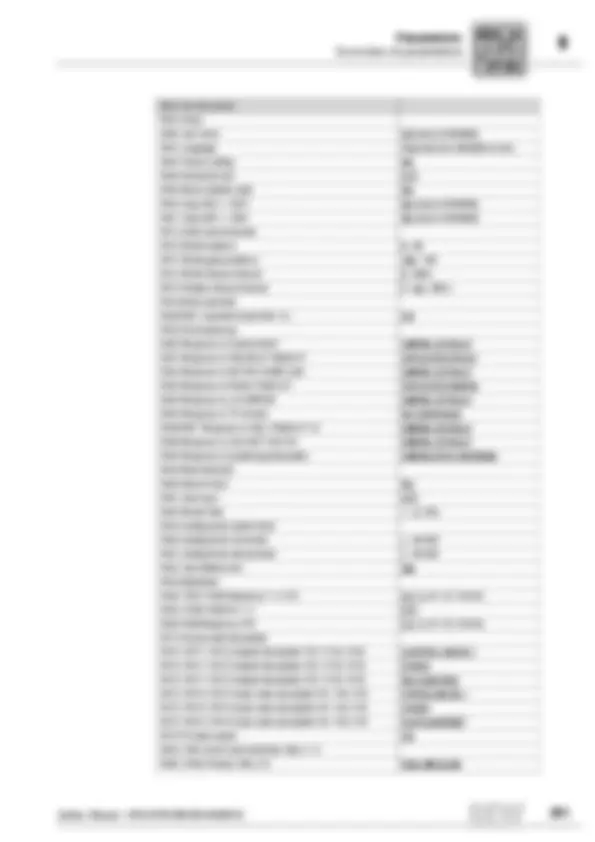
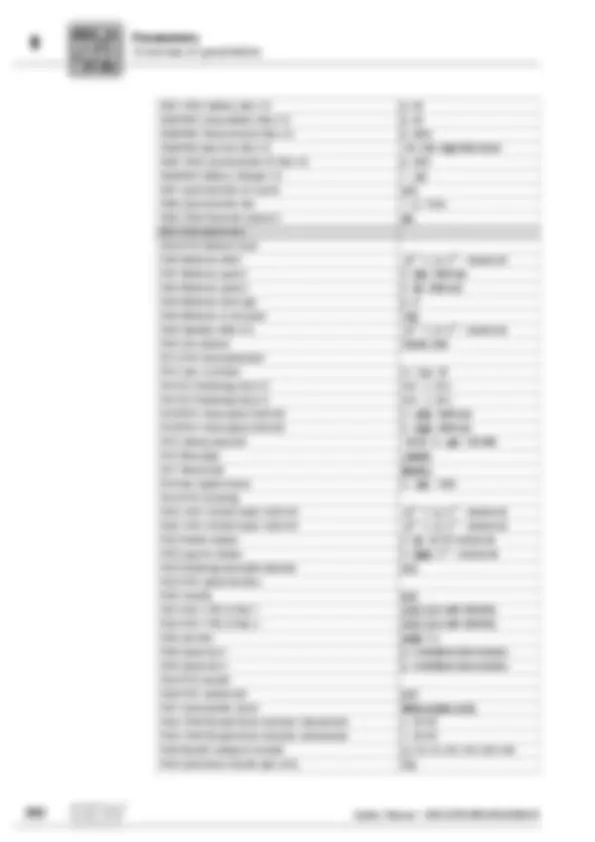
8.2 Overview of parameters
The following table lists all parameters together with their factory settings (under-
lined): Numerical values are displayed with the complete setting range.
[ ↑]
[ ↑]
[ ↑]
[ ↓]
[ ↓]
[ ↓]
[ ←]
[ ←]
[ ←]
[ →]
[ →]
[ →]
0.. DISPLAY VALUES
CONTROLLER INHIBIT
CURRENT: 0 A
1. SETPOINT
SELECTION
AI1 SCALING
1.. SETPOINTS/
RAMP GENERATORS
1. ANALOG INPUT
(+/- 10 V)
1. ANALOG INPUT
(OPTIONAL)
11 REFERENCE 3000
AI1 OPERATING MODE
3.. MOTOR
PARAMETERS
1. SPEED
RAMPS 1
11 0 V
AI1 V OFFSET
4.. REFERENCE
SIGNALS
1. SPEED
RAMPS 2
11 0 /M
AI1 n OFFSET
5.. MONITORING
FUNCTIONS
1. MOTOR POT. 5
11 1.89 ms SETPOINTT FILTER
6.. TERMINAL
ASSIGNMENT
1. FIXED
SETPOINTS 1
7.. CONTROL
FUNCTIONS
1. FIXED
SETPOINTS 2
8.. UNITS
FUNCTIONS
9.. IPOS
parameters
11 0 mV AI1 OFFSET
1. Menu menu level (^) 2. Submenu level 3. Parameter menu level Edit mode
111 mV AI1 OFFSET
P0xx Display values P00x Process values P000 Speed P001 User display P002 Frequency P003 Actual position P004 Output current P005 Active current P006 / P007 Motor utilization 1 / 2 P008 DC link voltage P009 Output current P01x Status displays P010 Inverter status P011 Operating state P012 Fault status P013 Current parameter set P014 Heat sink temperature
P
i
f
kVA
Hz
Overview of parameters
Parameters
P113 AI1 voltage offset −10 - 0 - 10 V P114 AI1 speed offset −6000 - 0 - 6000 rpm P115 Filter setpoint 0 - 5 - 100 ms, 0 = OFF P12x Analog inputs option P120 AI2 Operating mode (optional) NO FUNCTION P13x / P14x Speed ramps 1 / 2 P130 – P133 / P140 – P143 ramp t11 / t21 up/down CW/CCW 0 - 2 - 2000 s P130 – P133 / P140 – P143 ramp t11 / t21 up/down CW/CCW 0 - 2 - 2000 s P130 – P133 / P140 – P143 ramp t11 / t21 up/down CW/CCW 0 - 2 - 2000 s P130 – P133 / P140 – P143 ramp t11 / t21 up/down CW/CCW 0 - 2 - 2000 s P134 / P144 Ramp t12 / t22 UP=DOWN 0 - 10 - 2000 s P135 / P145 S pattern t12 / t22 0 - 3 P136 / P146 Stop ramp t13 / t23 0 - 2 - 20 s P137 / P147 Emergency stop ramp t14 / t24 0 - 2 - 20 s P138 Ramp limit VFC YES P139 / P149 Ramp monitoring 1 / 2 NO P15x Motor potentiometer P150 / P151 Ramp t3 up / down 0.2 - 20 - 50 s P150 / P151 Ramp t3 up / down 0.2 - 20 - 50 s P152 Save last setpoint OFF P16x / P17x Fixed setpoints 1 / 2 P16x / P17x Fixed setpoints 1 / 2 −6000 - 150 - 6000 rpm (% IN ) P16x / P17x Fixed setpoints 1 / 2 −6000 - 750 - 6000 rpm (% IN ) P16x / P17x Fixed setpoints 1 / 2 −6000 - 1500 - 6000 rpm (% IN ) P2xx Controller parameters P20x Speed control P200 P-gain n-controller 0.01 - 2 - 32 P201 Time constant n-controller 0 - 10 - 3000 ms P202 Gain acceleration precontrol 0 - 65 P203 Filter acceleration precontrol 0 - 100 ms P204 Filter actual speed value 0 - 32 ms P205 Load precontrol CFC -150 - 0 - 150% P206 Sampling time n-controller 1 ms / 0.5 ms P207 Load precontrol VFC −150 - 0 - 150% P21x Hold controller P210 P gain hold controller 0.1 - 0.5 - 32 P22x Synchronous operation control P220 P-gain DRS 1 - 10 - 200 P221 / P222 Master gear ratio factor / slave gear ratio factor 1 - 3 999 999 999 P221 / P222 Master gear ratio factor / slave gear ratio factor 1 - 3 999 999 999 P223 Mode selection Mode 1 - Mode 8 P224 Slave counter −9 999 999 - 10 - 99 999 999 P225 / P226 / P227 Offset 1/2/3 −2 767 - 10 - 32 767 P225 / P226 / P227 Offset 1/2/3 −2 767 - 10 - 32 767 P225 / P226 / P227 Offset 1/2/3 −2 767 - 10 - 32 767
P
i
f
kVA
Hz
Overview of parameters
Parameters
P228 Filter precontrol DRS 0 - 100 ms P23x Synchronous encoder with synchronous encoder P230 Distance encoder OFF P231 / P232 Factor slave encoder / factor slave synchronous encoder
P231 / P232 Factor slave encoder / factor slave synchronous encoder
P233 Synchronous encoder resolution 128 / 256 / 512 / 1024 / 2048 P234 Master encoder resolution 128 / 256 / 512 / 1024 / 2048 P24x Synchronous operation with catch up P240 Synchronous speed −000 - 1500 - 6000 rpm P241 Synchronization ramp 0 - 2 - 50 s P26x Process controller parameters P260 Operating mode Controller off P261 Cycle time 1 / 5 / 10 ms P262 Interruption No response P263 Factor KP 0 - 1 - 32, P264 Integrative time TN 0 - 10 - 65535 ms P265 Derivative time TV 0 - 1 - 30 ms P266 Precontrol −2767 - 0 - 32767 P27x Process controller input values P270 Setpoint source Parameter P271 Setpoint −2767 - 0 - 32767 P272 IPOS setpoint address 0 - 1023 P273 Time constant 0 - 0.01 - 2000 s P274 Scaling setpoint −2.767 - 1 - 32. P275 Actual value source Analog 1 P276 IPOS actual value address 0 - 1023 P277 Scaling actual value −2.767 - 1 - 32. P278 Offset actual value −2767 - 0 - 32767 P279 Time constant actual value 0 - 500 ms P28x Process controller limits P280 Minimum offset + actual value −2767 - 0 - 32767 P281 Maximum offset + actual value −2767 - 10000 - 32767 P282 PID controller minimum output −2767 - −000 - 32767 P283 PID controller maximum output −2767 - 10000 - 32767 P284 Process controller minimum output −2767 - 0 - 32767 P285 Process controller maximum output −2767 - 7500 - 32767 P3xx Motor parameters P30x / P31x Limits 1 / 2 P300 / P310 Start/stop speed 1/2 0 - 150 rpm P301 / P311 Minimum speed 1/2 0 - 15 - 6100 rpm P302/P312 Maximum speed 1/2 0 - 1500 - 6100 rpm P303/P313 Current limit 1/2 0 - 150% IN (size 0: 0 - 200% I (^) N ) P304 Torque limit 0 - 150% (size 0: 0 - 200%) P32x / P33x Motor compensation 1 / 2 (asynchronous) P320/P330 Automatic adjustment 1/2 ON P321/P331 Boost 1/2 0 - 100% P322/P332 IxR adjustment 1/2 0 - 100%
P
i
f
kVA
Hz
Overview of parameters
Parameters
P516 X41 Encoder monitoring NO P517 X41 Pulse count monitoring NO P518 X42 Encoder monitoring NO P519 X42 Pulse count monitoring NO P52x Mains OFF monitoring P520 Mains OFF response time 0 - 5 s P521 Mains OFF response CONTROLLER INHIBIT P522 Phase failure monitoring ON P53x Motor temperature protection P530 Sensor type 1 No sensor / TF-TH / KTY / TF-TH DEU / KTY DEU P531 Sensor type 2 No sensor / TF-TH / KTY / P54x Gear unit/motor monitoring P540 Drive vibration / response / warning Display error P541 Drive vibration response / fault Rapid stop/warning P542 Response to oil aging / warning Display error P543 Response to oil aging / fault Display error P544 Oil aging / overtemperature Display error P545 Oil aging / ready signal Display error P549 Response to brake wear Display error P55x Safety monitor DCS P550 DCS safety monitor status Display value P551 Binary inputs DCS DI1 – DI8 Display value P552 Binary outputs DCS DO0_P – DO2_M Display value P553 DCS series number Display value P554 CRC DCS Display value P555 Error response DCS / P556 Alarm response DCS Immediate stop/malfunction P555 Error response DCS / P556 Alarm response DCS Rapid stop/warning P557 DCS actual position source Motor encoder (X15) P56x Current limitation Ex-e motor P560 Current limit Ex-e motor Off P561 Frequency A 0 - 5 - 60 P562 Current limit A 0 - 50 - 150% P563 Frequency B 0 - 10 - 104 Hz P564 Current limit B 0 - 80 - 200% P565 Frequeny C 0 - 25 - 104 Hz P566 Current limit C 0 - 100 - 200% P6xx Terminal assignment P60x Binary inputs of basic unit P600 – P606 Binary input DIØ1 – DIØ7 CW/STOP P600 – P606 Binary input DIØ1 – DIØ7 CCW/STOP P600 – P606 Binary input DIØ1 – DIØ7 ENABLE/STOP P600 – P606 Binary input DIØ1 – DIØ7 n11/n P600 – P606 Binary input DIØ1 – DIØ7 n12/n P600 – P606 Binary input DIØ1 – DIØ7 NO FUNCTION P600 – P606 Binary input DIØ1 – DIØ7 NO FUNCTION P61x Binary inputs of option P610 – P617 Binary inputs DI1Ø – DI17 NO FUNCTION P62x Binary outputs of basic unit
P
i
f
kVA
Hz
Overview of parameters
Parameters
P620 – P624 Binary outputs DOØ1 – DOØ5 READY FOR OPERATION P620 – P624 Binary outputs DOØ1 – DOØ5 /FAULT P620 – P624 Binary outputs DOØ1 – DOØ5 IPOS OUTPUT P620 – P624 Binary outputs DOØ1 – DOØ5 IPOS OUTPUT P620 – P624 Binary outputs DOØ1 – DOØ5 IPOS OUTPUT P63x Binary outputs of option P630 – P637 Binary outputs DO1Ø – DO17 NO FUNCTION P64x Optional analog outputs P640 / P643 Analog output AO1 / AO2 ACTUAL SPEED P641 / P644 Scaling AO1 / AO2 −0 - 0 - 1 - 10 P642 / P645 Operating mode AO1 / AO2 OFF / −0 V - +10 V / 0(4) - 20 mA P640 / P643 Analog output AO1 / AO2 OUTP.CURRENT P641 / P644 Scaling AO1 / AO2 −0 - 0 - 1 - 10 P642 / P645 Operating mode AO1 / AO2 OFF / −0 V - +10 V / 0(4) - 20 mA P7xx Control functions P70x Operating modes P700/P701 Operating mode 1/2 VFC 1 / 2 P702 Motor category Rotatory/Linear P71x Standstill current P710/P711 Standstill current 1/2 0 - 50% IMot P72x Setpoint stop function P720/P723 Setpoint stop function 1/2 OFF P721/P724 Stop setpoint 1/2 0 - 30 - 500 rpm P722/P725 Start offset 1/2 0 - 30 - 500 rpm P73x Brake function P730 / P733 Brake function 1 / 2 ON P731 / P734 Brake release time 1 / 2 0 - 2 s P732 / P735 Brake application time 1 / 2 0 - 2 s P74x Speed skip P740/P742 Skip center 1/2 0 - 1500 - 6000 rpm P741 / P743 Skip width 1 / 2 0 - 300 rpm P75x Master-slave function P750 Slave setpoint MASTER-SLAVE OFF P751 Scaling slave setpoint −0 - 0 - 1 - 10 P76x Manual operation P760 Lockout run/stop keys NO P77x Energy-saving function P770 Energy-saving function OFF P78x Ethernet configuration P780 IP address 000.000.000.000 - 192.168.10.x - 223.255.255. P781 Subnet mask 000.000.000.000 - 255.255.255.000 - 255.255.255. P782 Standard gateway 000.000.000.000 - 223.255.255. P783 Baud rate P784 MAC address P785 Ethernet / IP startup configuration DHCP
P
i
f
kVA
Hz
Overview of parameters
Parameters
P881 / P891 Address SBus 1/2 0 - 63 P882/P892 Group address SBus 1/2 0 - 63 P883/P893 Timeout interval SBus 1/2 0 - 650 s P884/P894 Baud rate SBus 1/2 125 / 250 / 500/1000 kBaud P885 / P895 Synchronization ID SBus 1/2 0 - 2047 P886/P896 Address CANopen 1/2 1 - 127 P887 Synchronization ext. control OFF P888 Synchronization time 1 - 5 - 10 ms P889 / P899 Parameter channel 2 NO P9xx IPOS parameters P90x IPOS reference travel P900 Reference offset -(2 31 −) - 0 - 2^31 − increments P901 Reference speed 1 0 - 200 - 6000 rpm P902 Reference speed 2 0 - 50 - 6000 rpm P903 Reference travel type 0 - 8 P904 Reference to zero pulse YES P905 Hiperface offset X15 -(2 31 −) - 0 - 2^31 − increments P906 Cam distance Display value P91x IPOS travel parameters P910 Gain X controller 0.1 - 0.5 - 32 P911/912 Positioning ramp 1/2 0.01 - 1 - 20 s P911/912 Positioning ramp 1/2 0.01 - 1 - 20 s P913/P914 Travel speed CW/CCW 0 - 1500 - 6000 rpm P913/P914 Travel speed CW/CCW 0 - 1500 - 6000 rpm P915 Velocity precontrol −99.99 - 0 - 100 - 199.99% P916 Ramp type LINEAR P917 Ramp mode MODE 1 P918 Bus setpoint source 0 – 499 – 1023 P92x IPOS monitoring P920 / P921 SW limit switch CW/CCW -(2 31 −) - 0 - 2^31 − increments P920 / P921 SW limit switch CW/CCW -(2 31 −) - 0 - 2^31 − increments P922 Position window 0 - 50 - 32 767 increments P923 Lag error window 0 - 5000 - 2^31 − increments P924 Positioning interruption detection OFF P93x IPOS special functions P930 Override OFF P931 IPOS CTRL.W Task 1 STOP (only with DBG60B) P932 IPOS CTRL.W Task 2 STOP (only with DBG60B) P933 Jerk time 0.005 - 2 s P938 Speed task 1 0 - 9 additional commands/ms P939 Speed task 2 0 - 9 additional commands/ms P94x IPOS encoder P940 IPOS variable edit OFF P941 Actual position source Motor encoder (X15) P942 / P943 Encoder factor numerator / denominator 1 - 32 767 P942 / P943 Encoder factor numerator / denominator 1 - 32 767 P944 Encoder scaling ext. encoder x1 / x2 / x4 / x8 / x16 / x32 / x P945 Synchronous encoder type (X14) TTL
P
i
f
kVA
Hz
Explanation of the parameters
Parameters
8.3 Explanation of the parameters
The parameters are explained below. The parameters are divided into 10 groups. The
parameter names correspond to their representation in the parameter tree. The factory
setting is underlined.
8.3.1 Symbols
The following symbols explain the parameters:
8.3.2 P0xx Display values
This parameter group contains the following information:
- Process values and states of the basic unit
- Process values and states of the installed options
- Fault memory
- Fieldbus parameters
P00x Process values
P000 Speed Resolution with DBG60B: +/– 1 rpm; with SHELL: +/– 0.2 rpm
In VFC or U/f mode without connected encoder, the speed results from the setpoint
speed and the set slip compensation. The speed is established from the encoder or
resolver signals and is displayed when there is an encoder connection.
P946 Distance encoder counting direction (X14) NORMAL P947 Hiperface offset X14 -(2 31 −) - 0 - 2^31 − increments P948 Automatic encoder replacement detection On P95x Absolute encoder P950 Encoder type NO ENCODER P951 Counting direction NORMAL P952 Cycle frequency 1 - 200% P953 Position offset -(2 31 −) - 0 - 2^31 − increments P954 Zero offset -(2 31 −) - 0 - 2^31 − increments P955 Encoder scaling x1 / x2 / x4 / x8 / x16 / x32 / x P96x IPOSplus ®^ modulo function P960 Modulo function OFF P961 Modulo numerator 1 - 2^31 - 1 P962 Modulo denominator 1 - 2^31 - 1 P963 Modulo encoder resolution 1 - 4096 - 65535 P97x IPOS synchronization P970 DPRAM synchronization ON P971 Synchronization phase −2 - 0 - 2 ms
These parameters are switch-selectable and available in parameter sets 1 and
These parameters can only be changed with INHIBITED inverter status (= out-
put stage at high resistance).
The startup function automatically changes this parameter.
AUTO
P
i
f
kVA
Hz
Explanation of the parameters
Parameters
- E: CALIBRATE ENCODER
- F: ERROR
- H: MANUAL MODE
- t: WAITING ON DATA
- U: STO
P012 Fault status Fault number and fault in plain text. The fault number also appears on the inverter's 7-
segment display.
P013 Current
parameter set
Parameter set 1 or 2.
P014 Heat sink
temperature
Heat sink temperature of the inverter in the range −40 – 125 °C.
P015 Operating
hours
Total number of hours for which the inverter has been connected to the mains or an
external DC 24 V supply. Storage cycle every 15 min.
P016 Enable hours Total number of hours for which the inverter was in ENABLE operating state; storage
cycle every 15 min.
P017 Work Total of the active electrical energy the motor has consumed; storage cycle every
15 min.
P018 / P019 KTY
utilization 1 / 2
Display 0%: Motor is not in operation at max. ambient temperature.
Display 110%: Cut-off point of motor.
P02x Analog setpoints
P020 / P021 Ana-
log input AI1/AI
Voltage (−10 V – +10 V) at analog input AI1 (020) and at the optional analog input AI
(021). If P112 AI1 operating mode = N-MAX, 0(4) – 20 mA and S11 = ON, then P
0(1) – 5 V = 0(4) – 20 mA will be displayed.
P022 External
current limitation
If P120 AI2 operating mode (optional) = 0 – 10 V I-limit, then P022 is used to display the
active external current limitation.
P03x Binary inputs of basic unit
P030 – P
Binary inputs
DI00 – DI
Displays the current status of input terminals DI00 – DI07 and the current function
assignment.
Binary input DI00 is always assigned with controller inhibit.
Menu selection see P60x Binary inputs of basic unit.
P039 Binary inputs
DI00 – DI
Displays the standard binary inputs DI00 to DI07 in this sequence.
P04x Binary inputs option
P040 – P
Binary inputs
DI10 – DI
Displays the current status of the binary input on an option card (e.g. DIO) with the
current function assignment. If the option is not installed, the display will show "–".
Menu selection see P61x Binary inputs of option.
P
i
f
kVA
Hz
Explanation of the parameters
Parameters
P048 Binary inputs
DI10 – DI
Shows the optional binary inputs DO10 – DO17 in this sequence.
P05x Binary outputs of basic unit
P050 – P
Binary outputs
DB00, DO01 –
DO
Displays the current state of the binary output on the basic unit with the current function
assignment.
Output DB00 is always programmed to the "/Brake" function.
Menu selection see P62x Binary outputs of basic unit.
P059 Binary
outputs DB00,
DO01 – DO
Displays the binary outputs DB00 and DO01 – DO05 in this sequence.
P06x Binary outputs option
P060 – P
Binary outputs
DO10 – DO
Displays the current state of the binary output on an option card (e.g. DIO) with the
current function assignment. If the option is not installed, the display will show "–".
Menu selection see P63x Binary outputs of option.
P068 Binary out-
puts DO10 – DO
Shows the optional binary outputs DO10 – DO17 in this sequence.
P07x Unit data
P070 Unit type Displays the complete designation of the unit, e.g. MDX60B0014-5A3.
P071 Rated output
current
Displays the r.m.s. value of the rated output current.
P072 Encoder slot
option / firmware
Displays the encoder card currently installed in the encoder slot and the program
version.
P073 Fieldbus slot
option / firmware
Displays the fieldbus card currently installed in the fieldbus slot and the program version.
P074 Option /
firmware
expansion slot
Displays the option card currently installed in the expansion slot and the program
version, if this option has a program memory.
P076 Basic unit
firmware
Displays the program version of the firmware used in the basic unit.
P078 Technology
function
Displays the currently set technology function.
This function is set in MOVITOOLS®^ MotionStudio under "Startup – Select technology
function".
- STANDARD: Setting for operating the inverter with the functions described in the
system manual (positioning, speed control, etc.).
- ELECTRONIC CAM: Setting for using the technology function "Electronic cam" to
coordinate the operation of several drives. Requirements:
- Motor with encoder feedback
- "Technology" type inverter
P
i
f
kVA
Hz
Explanation of the parameters
Parameters
P09x Bus diagnostics
P090 PD
configuration
Set process data word configuration.
P091 Fieldbus type Installed fieldbus type:
- PROFIBUS DP
- INTERBUS
- INTERBUS with LWL
- Ethernet
- DeviceNet
- NO FIELDBUS
P092 Fieldbus
baud rate
Active baud rate.
P093 Fieldbus
address
Address of the inverter on the fieldbus.
P094 – P
PO1 – PO
setpoint
Displays the value currently transferred on the process data word in hexadecimal form.
P097 – P099 PI1 –
PI3 actual value
Displays the value currently transferred on the process data word in hexadecimal form.
8.3.3 P1xx Setpoints/ramp generators
P10x Setpoint preselection
P100 Setpoint source and P101 Control signal source can also be used for selecting a
communication interface as the setpoint or control signal source. However, the inter-
faces are not automatically deactivated with these parameters because the inverter
must remain ready to receive data via all interfaces at any time.
Fixed setpoints always have priority over other setpoints.
If the inverter is in "t = Waiting for data" state, check the timeout intervals of parameters
P812 RS485 timeout interval, P815 and P819 and, if necessary, switch off timeout mon-
itoring by entering 0 s or 650 s.
P100 Setpoint
source
This parameter is used to set the setpoint source for the inverter.
- BIPOL./FIX.SETPT: The setpoint is derived from the analog inputs (AI1/AI2) or from
P16x / P17x Fixed setpoints 1 / 2, if these were selected via P60x Binary inputs of
basic unit / P61x Binary inputs of option. The setpoints are processed according to
their value. A positive setpoint results in CW rotation, a negative setpoint in CCW ro-
tation.
PO setpoint Description P094 PO1 setpoint P870 Setpoint description PO P095 PO2 setpoint P871 Setpoint description PO P096 PO3 setpoint P872 Setpoint description PO
PI setpoint Description P097 PI1 actual value P873 Actual value description PI P098 PI2 actual value P874 Actual value description PI P099 PI3 actual value P875 Actual value description PI
P
i
f
kVA
Hz
Explanation of the parameters
Parameters
- UNIPOL./FIXED SETPT.: The setpoint is provided by the analog inputs or the fixed
setpoints. Negative analog setpoints result in a setpoint of zero. The fixed setpoints
are processed in accordance to their values. The direction of rotation is set using
P60x Binary inputs of basic unit / P61x Binary inputs of option.
- RS485: The setpoint is obtained from the RS485 interface.
- FIELDBUS: The setpoint is obtained from the fieldbus interface.
- MOTOR POT.: The setpoint is generated by the internal motor potentiometer. For
this purpose, one binary input must be programmed to MOTOR.POT. UP and
another binary input to MOTOR.POT. DOWN. The binary inputs must be activated
accordingly. The direction of rotation is specified by the binary inputs CW/stop and
CCW/stop. See P15x Motor potentiometer.
- MOTORPOT+ANALOG1: The setpoint is defined by the total of the motor potentiom-
eter and the setpoint selection at analog input AI1. The analog setpoint is processed
as a signed setpoint. If the sum is negative, nmin applies. The direction of rotation is
specified using binary inputs. Also, the settings of P112 AI1 Operating mode apply.
See P15x Motor potentiometer.
- FIX SETP+ANALOG1: The setpoint is defined by the total of the selected fixed set-
point and the setpoint selection at analog input AI1. The fixed setpoint is processed
without sign (= according to its value) and the analog setpoint is processed as a
signed setpoint. If the total is negative or if a fixed setpoint has not been selected,
n min applies. The direction of rotation is specified using binary inputs. See P16x /
P17x Fixed setpoints 1 / 2.
- FIXEDSETxANALOG1: The value at analog input AI1 serves as evaluation factor
(0 – 10 V = 0 – 100%) for the selected fixed setpoint. The fixed setpoint is processed
without sign (= according to its value). If the voltage at analog input AI1 is negative
or if no fixed setpoint is selected, n min applies. The direction of rotation is specified
using binary inputs. See P16x / P17x Fixed setpoints 1 / 2.
- MASTER SBus1: In master/slave mode, the setpoint is provided by the master via
system bus 1. See P75x Master-slave function.
- MASTER-RS485: The setpoint comes from the master in master/slave mode via the
RS485 interface. See P75x Master-slave function.
- SBus 1: The setpoint is specified using system bus 1. See IPOS plus®^ manual.
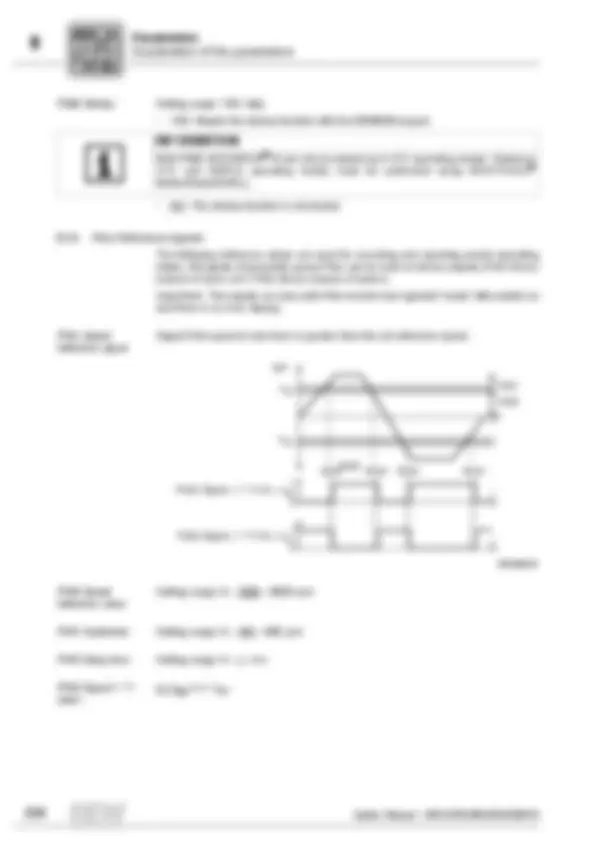
- FREQUENCY INPUT: Setting P100 Setpoint source to the function "Frequency
input" causes the setpoint speed to be set via digital input DI04 in the form of a
frequency. For this purpose, binary input DI04 (P600 – P606 Binary input DIØ1 –
DIØ7) must be set to "No function" and DIP switch S14 must be set to "ON" position.
The binary input works with PLC-compatible input signals that are specified as fol-
lows:
- 0 – 7 V -> 0 level
- 7 – 24 V -> 1 level
- This means an HTL encoder can be connected to the binary input to serve as a
reference input variable encoder. The pulses from this encoder are then counted
via binary input DI04 and a setpoint is calculated for the device. The pulse duty
factor (pulse width of the high and low signal) should be about 1 : 1. The factor
determines the rising edge and the falling edge of the input signal. Use P102 Fre-
quency scaling to determine at which input frequency the system setpoint (torque
or speed) 100% is reached. The reference of the system setpoint is set via P
AI1 Operating mode. The direction of rotation is set via the binary inputs CW/
STOP and CCW/STOP.
P
i
f
kVA
Hz
Explanation of the parameters
Parameters
P11x Analog input AI
P110 AI1 Scaling Setting range: –10 – 0 – 1 – 10
The slope of the setpoint characteristic curve is defined. Depending on P112 AI
Operating mode with AI1 scaling = 1 and an input voltage V I of +/–10 V, the setpoint +/
–3000 rpm or +/–n max is set.
With P100 Setpoint source = UNIPOL./FIXED SETP., only the first quadrant can be
used; negative setpoint selections will result in a setpoint of zero. If a current input is set
in P112 AI1 Operating mode, P110 AI1 Scaling is ineffective.
P111 AI1 Offset Setting range: –500 – 0 – 500 mV
When the setpoint is selected by an external controller, it is possible to compensate for
a voltage offset present at analog input AI1 when the setpoint selection is zero. Setting
this parameter causes calibration of the coordinate basic origin. This setting takes effect
in all AI1 operating modes.
n
10V
-10V -5V 5V
U E
n 3 000 rpm
max
n / 1500 rpm
max
-n
max
-n / -1500 rpm
max
P
i
f
kVA
Hz
Explanation of the parameters
Parameters
P112 AI
Operating mode
The selection for the AI1 operating mode differentiates between various characteristic
curves and voltage/current inputs.
- Ref. N-MAX: Voltage input with reference nmax (P302/P312 Maximum speed 1/2).
The characteristic can be adapted with P110 AI1 Scaling. P113 AI1 voltage offset
and P114 AI1 speed offset are ineffective.
- Ref. 3000 rpm: Voltage input with reference 3000 rpm. The characteristic can be
adapted with P110 AI1 Scaling. P113 AI1 voltage offset and P114 AI1 speed offset
are ineffective.
- V-Off., N-MAX Voltage input with reference n (^) max. The characteristic can be adapted
with P113 AI1 voltage offset. P110 AI1 Scaling and P114 AI1 speed offset are
ineffective.
- N-Off., N-MAX Voltage input with reference n (^) max. The characteristic can be adapted
with P114 AI1 speed offset. P110 AI1 Scaling and P113 AI1 voltage offset are
ineffective.
- N-MAX, 0-20mA: Current input 0 – 20 mA = 0 – n (^) max , no setting options (P110 AI
Scaling ineffective). Set the internal load (250 Ω) "S11 = ON".
- N-MAX, 4-20mA: Current input 4 – 20 mA = 0 – n (^) max , no setting options (P110 AI
Scaling ineffective). Set the internal load (250 Ω) "S11 = ON". This setting means that
analog input AI1 is monitored for wire breakage (P105 Error response to wire break-
age AI1).
- Expert characteristic curve: Free choice of reference between setpoint voltage and
speed. The characteristic can be adapted with P110 AI1 Scaling (reference
3000 rpm), P113 AI1 voltage offset and P114 AI1 speed offset. The following
structural diagram shows how a speed setpoint is created from an expert character-
istic curve.
P113 AI1 voltage
offset
Setting range: –10 – 0 – 10 V
+n (^) max
-nmax
V
0...±10V
I P100 =
BIPOL.
P100 =
UNIPOL.
Speed
setpoint
Speed
setpoint
Speed
setpoint
CW
CCW
Exper t characteristic Speed limitation
P
i
f
kVA
Hz