



Advanced
Examples and
Ideas
docsity.com








































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Course title is Embedded Intelligent Robotics. This course is for Electrical engineering students. Though good thing is everyone can learn about robotics in this course. This lecture includes: Advanced Evolutionary, Three Layer Evolutionary Approach, Evolve in Hierarchy, Applications, Optimization Problems, Ant Colony Optimization, Reactive Search Optimi, Harmony Search, Control Schema, Weighted Global Fitness, Pareto Front
Typology: Slides
1 / 76

This page cannot be seen from the preview
Don't miss anything!
Evolve Behaviors Evolve Motions Evolve Perceptions Global perceptions, possibly encoded such as “narrow Corridor” or “beautiful Princess” Local perceptions, such as “bald head” or “long beard” Behaviors such as “go forward until you find a wall, else turn randomly right or left Encoded behaviors or internal states Time intervals Motions as timed sequences of encoded actions, for instance RFRFLL docsity.com
Evolve in hierarchy
Question; How to represent the chromosomes? Here you see several snapshots of a “movie” about parking a truck, stages of the solution process. docsity.com
Input and output data are some form of MV logic
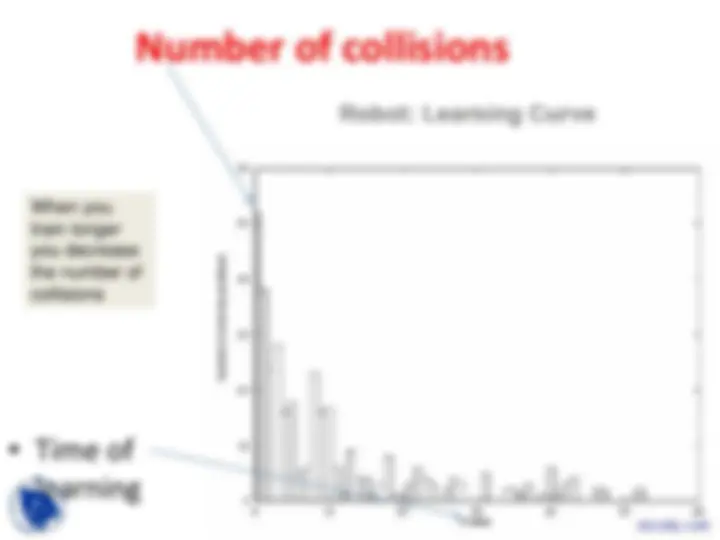
When you train longer you decrease the number of collisions
Applications and Problems