



Wandering
Standpoint
Algorithm
docsity.com






Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Course title is Embedded Intelligent Robotics. This course is for Electrical engineering students. Though good thing is everyone can learn about robotics in this course. This lecture includes: Wandering Standpoint Algorithm, Algorithm, Mapping Algorithms, Measurements, Distbug Algorithm, Search Algorithms, Fitness Function
Typology: Slides
1 / 17

This page cannot be seen from the preview
Don't miss anything!
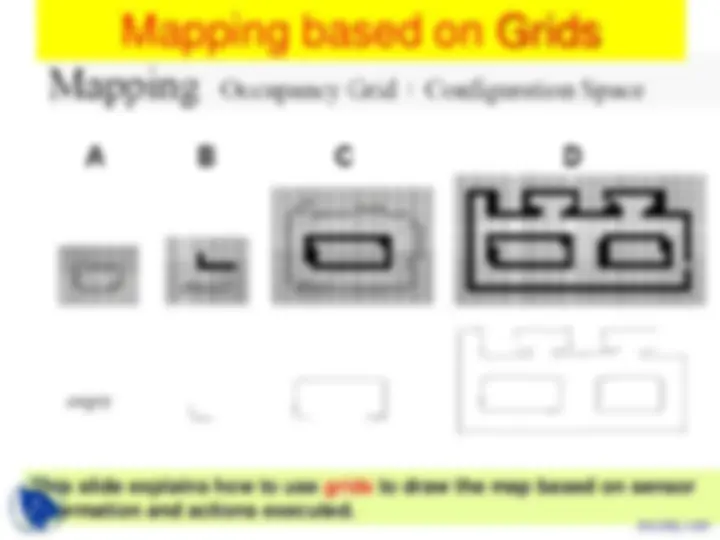
Mapping
Grid or no grid?
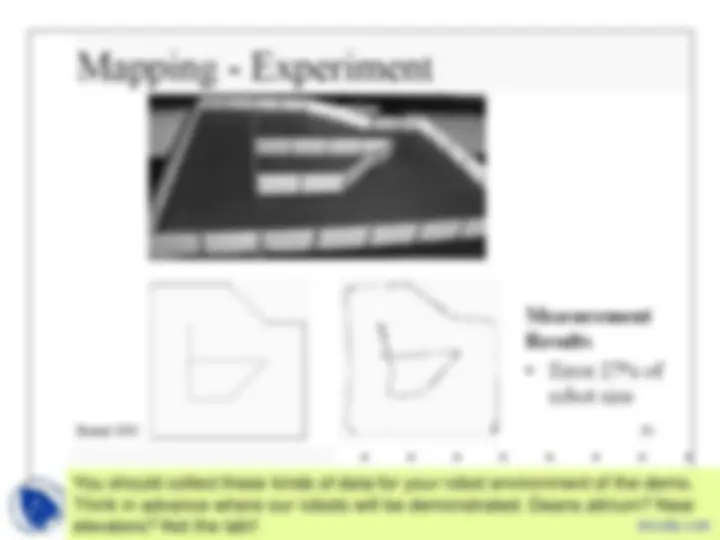
The smaller the error the more accurate the map
You should collect these kinds of data for your robot environment of the demo. Think in advance where our robots will be demonstrated. Deans attrium? Near elevators? Not the lab!! docsity.com
Conclusions and to think about