


Chapter 11
Rolling, Torque, and Angular Momentum
10.9 Rolling Motion of a Rigid Object (Serway)






























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Angular momentum summary Solved questions Formulas
Typology: Lecture notes
1 / 40

This page cannot be seen from the preview
Don't miss anything!
Angular Momentum
The Vector Product
Section 11.
The Vector Product and Torque
Section 11.
More About the Vector Product The quantity AB sin q is equal to the
. The direction of is perpendicular to the plane formed by. The best way to determine this direction is to use the right-hand rule.
Section 11. We now give a formal definition of the vector product. Given any two vectors
S and B S , the vector product A S
S is defined as a third vector C S , which has a magnitude of AB sin u, where u is the angle between A S and B S
. That is, if C
S is given by
S
S
S
its magnitude is C 5 AB sin u (11.3) The quantity AB sin u is equal to the area of the parallelogram formed by A S and
S as shown in Figure 11.2. The direction of C S is perpendicular to the plane formed by A S and B S , and the best way to determine this direction is to use the right-hand rule illustrated in Figure 11.2. The four fingers of the right hand are pointed along
S and then “wrapped” in the direction that would rotate A S into B S through the angle u. The direction of the upright thumb is the direction of A S
S
S
Because of the notation, A S
S is often read “ A S cross B S ,” so the vector product is also called the cross product. Some properties of the vector product that follow from its definition are as follows:
1. Unlike the scalar product, the vector product is not commutative. Instead,
the order in which the two vectors are multiplied in a vector product is important:
S
S
S
S
Therefore, if you change the order of the vectors in a vector product, you must change the sign. You can easily verify this relationship with the right- hand rule.
2. If A
S is parallel to B S (u 5 0 or 180 8 ), then A S
S 5 0 ; therefore, it follows that A S
S
3. If A
S is perpendicular to B S , then 0 A S
S
duct A
3 B
is defined as a third vector C
, which has a where u is the angle between A
and B
. That is, if C
is C
5 A
3 B
(11.2) C 5 AB sin u (11.3) equal to the area of the parallelogram formed by A
and
is perpendicular to the plane formed st way to determine this direction is to use the right-hand 11.2. The four fingers of the right hand are pointed along in the direction that would rotate A
into B
through the of the upright thumb is the direction of A
3 B
5 C
. A
3 B
is often read “ A
cross B
,” so the vector product is uct. he vector product that follow from its definition are as roduct, the vector product is not commutative. Instead, the two vectors are multiplied in a vector product is A
3 B
5 2 B
3 A
(11.4) Chapter 11 Angular Momentum We now give a formal definition of the vector product. Given any two vecto
S and B S , the vector product A S
S is defined as a third vector C S , which has magnitude of AB sin u, where u is the angle between A S and B S
. That is, if C
S given by
S
S
S
its magnitude is C 5 AB sin u (11. The quantity AB sin u is equal to the area of the parallelogram formed by A S an
S as shown in Figure 11.2. The direction of C S is perpendicular to the plane forme by A S and B S , and the best way to determine this direction is to use the right-han rule illustrated in Figure 11.2. The four fingers of the right hand are pointed alon
S and then “wrapped” in the direction that would rotate A S into B S through th angle u. The direction of the upright thumb is the direction of A S
S
S Because of the notation, A S
S is often read “ A S cross B S ,” so the vector product also called the cross product. Some properties of the vector product that follow from its definition are follows:
1. Unlike the scalar product, the vector product is not commutative. Instead,
the order in which the two vectors are multiplied in a vector product is important:
S
S
S
S
Therefore, if you change the order of the vectors in a vector product, you must change the sign. You can easily verify this relationship with the right- hand rule. S S S S Properties of the vector product 11.1 The torque vector n a direction perpendicular lane formed by the posi- ctor r S and the applied force F S
. In the situation shown,
F S lie in the xy plane, so the is along the z axis. O P y z f r S r S F S F S t!! S S direction of C is perpendicular
Properties of the vector product rule illustrated in Figure 11.2. The four fingers of the right hand are pointed along
S and then “wrapped” in the direction that would rotate A S into B S through the angle u. The direction of the upright thumb is the direction of A S
S
S
Because of the notation, A S
S is often read “ A S cross B S ,” so the vector product is also called the cross product. Some properties of the vector product that follow from its definition are as follows:
1. Unlike the scalar product, the vector product is not commutative. Instead,
the order in which the two vectors are multiplied in a vector product is important:
S
S
S
S
Therefore, if you change the order of the vectors in a vector product, you must change the sign. You can easily verify this relationship with the right- hand rule.
2. If A
S is parallel to B S (u 5 0 or 180 8 ), then A S
S 5 0 ; therefore, it follows that A S
S
3. If A
S is perpendicular to B S , then 0 A S
S
4. The vector product obeys the distributive law:
S
S
S
S
S
S
S
5. The derivative of the vector product with respect to some variable such as t is
d dt
S
S
d A S dt
S
S
d B S dt
where it is important to preserve the multiplicative order of the terms on the right side in view of Equation 11.4. It is left as an exercise (Problem 4) to show from Equations 11.3 and 11.4 and from the definition of unit vectors that the cross products of the unit vectors i
, j
,
and k
obey the following rules: r lar
rce , he F S S icular B , d by ct
Signs in Cross Products
Section 11.
S
S
S
S
S
y
z
y
z
z
x
z
x
x
y
x
y
the right side in view of Equation 11.4.
It is left as an exercise (Problem 4) to show from Equations 11.3 and 11.4 and
from the definition of unit vectors that the cross products of the unit vectors i
^ , j
^ ,
and k
^ obey the following rules:
i
^ 3 i
^ 5 j
^ 3 j
^ 5 k
^ 3 k
^ 5 0 (11.7a)
i
^ 3 j
^ 5 2 j
^ 3 i
^ 5 k
^ (11.7b)
j
^ 3 k
^ 5 2 k
^ 3 j
^ 5 i
^ (11.7c)
k
^ 3 i
^ 5 2 i
^ 3 k
^ 5 j
^ (11.7d)
Signs are interchangeable in cross products. For example, A
S
3 12 B
S
(^2) 5 2 A
S
3 B
S
and i
^ 3
1 2 j
^ 2 5 2 i
^ 3 j
^ .
The cross product of any two vectors A
S
and B
S
can be expressed in the follow-
ing determinant form:
A
S
3 B
S
5 †
i
^ j
^ k
^
A x
A y
A z
B x
B y
B z
† (^5) `
A y
A z
B y
B z
` i
^ (^1) `
A z
A x
B z
B x
` j
^ (^1) `
A x
A y
B x
B y
` k
^
s of
tors
tor
f tak-
n two
ation
de of
A
S
roduct
having
to the
own.
Using Determinants
Section 11.
j
^
3 k
^
5 2 k
^
3 j
^
5 i
^
(11.7c)
k
^ 3 i
^ 5 2 i
^ 3 k
^ 5 j
^ (11.7d)
terchangeable in cross products. For example, A
S
3 12 B
S
(^2) 5 2 A
S
3 B
S
j
^ (^2) 5 2 i
^ 3 j
^ .
s product of any two vectors A
S
and B
S
can be expressed in the follow-
inant form:
A
S
3 B
S
5 †
i
^
j
^
k
^
A x
A y
A z
B x
B y
B z
† 5 `
A y
A z
B y
B z
` i
^
1 `
A z
A x
B z
B x
` j
^
1 `
A x
A y
B x
B y
` k
^
Torque Vector Example
Section 11.
304 CHAPTE R 11 ROLLI NG, TORQU E, AN D ANG U L AR M OM E NTU M
the position vector a
tween the directions
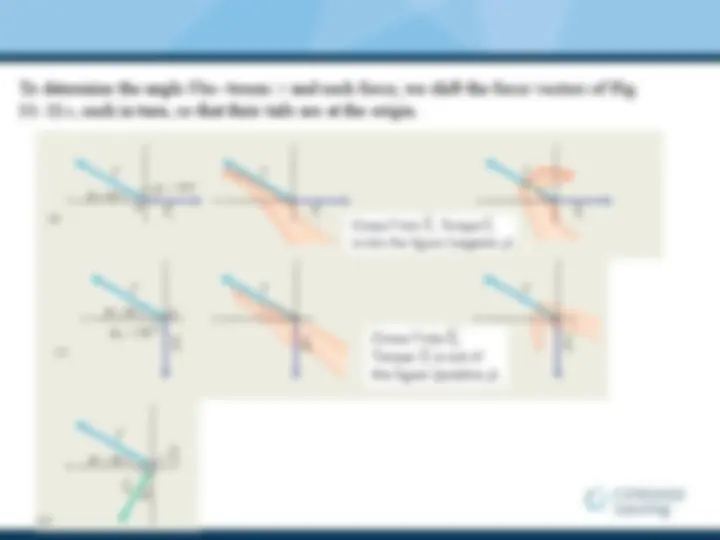
Sample Problem 11.02 Torque on a particle due to a force
In Fig. 11-11 a , three forces, each of magnitude 2.0 N, act on a
particle. The particle is in the xz plane at point A given by
position vector , where r " 3.0 m and u " 30 !. What is the
torque, about the origin O , due to each force?
KEY IDEA
Because the three force vectors do not lie in a plane, we
must use cross products, with magnitudes given by Eq. 11-
(t " rF sin f) and directions given by the right-hand rule.
Calculations: Because we want the torques with respect to
the origin O , the vector required for each cross product
is the given position vector. To determine the angle f be-
tween and each force, we shift the force vectors of Fig. 11-
11 a , each in turn, so that their tails are at the origin. Figures
11-11 b , c , and d , which are direct views of the xz plane, show
the shifted force vectors and , respectively. (Note
how much easier the angles between the force vectors and
F
:
3
F
:
2
F ,
:
1
,
r
:
r
:
r
:
means F is directed
:
3
would use ".)
Now, applying Eq
t 1
" rF 1
sin f 1
"
t 2
" rF 2
sin f 2
"
and t 3
" rF 3
sin f
" 6.0 N #m
Next, we use the
the right hand so as t
the two angles betwe
the direction of the to
Fig. 11-11 b ; t
:
2
is dire
t
:
3
is directed as show
tors are shown in Fig.
304 CHAPTE R 11 ROLLI NG, TORQU E, AN D ANG U L AR M OM E NTU M
the position vector are to see.) In Fig. 11
tween the directions of and F is 90!
:
3
r
:
Sample Problem 11.02 Torque on a particle due to a force
In Fig. 11-11 a , three forces, each of magnitude 2.0 N, act on a
particle. The particle is in the xz plane at point A given by
position vector , where r " 3.0 m and u " 30 !. What is the
torque, about the origin O , due to each force?
Because the three force vectors do not lie in a plane, we
must use cross products, with magnitudes given by Eq. 11-
(t " rF sin f) and directions given by the right-hand rule.
Calculations: Because we want the torques with respect to
the origin O , the vector required for each cross product
is the given position vector. To determine the angle f be-
tween and each force, we shift the force vectors of Fig. 11-
11 a , each in turn, so that their tails are at the origin. Figures
11-11 b , c , and d , which are direct views of the xz plane, show
the shifted force vectors and , respectively. (Note
how much easier the angles between the force vectors and
:
3
:
2
:
1
r
:
r
:
r
:
means F is directed into the page. (For
:
3
would use ".)
Now, applying Eq. 11-15, we find
t 1
" rF 1
sin f 1
" (3.0 m)(2.0 N)(sin 15
t 2
" rF 2
sin f 2
" (3.0 m)(2.0 N)(sin 12
and t 3
" rF 3
sin f 3
" (3.0 m)(2.0 N)(s
" 6.0 N #m.
Next, we use the right-hand rule, pla
the right hand so as to rotate into thr
the two angles between their directions. T
the direction of the torque.Thus t
:
1
is direc
Fig. 11-11 b ; t
:
2
is directed out of the page
t
:
3
is directed as shown in Fig. 11-11 d. Al
tors are shown in Fig. 11-11 e.
:
r
:
(t " rF sin f) and directions given by the right-hand rule.
Calculations: Because we want the torques with respect to
the origin O , the vector required for each cross product
is the given position vector. To determine the angle f be-
tween and each force, we shift the force vectors of Fig. 11-
11 a , each in turn, so that their tails are at the origin. Figures
11-11 b , c , and d , which are direct views of the xz plane, show
the shifted force vectors and , respectively. (Note
how much easier the angles between the force vectors and
:
3
:
2
:
1
r
:
r
:
A
z
x
y
( a )
F 3
F 1
F 2
θ (^) O
r
x
z
θ = 30°
( b )
φ 1
= 150°
O
F 1
r
x
z
F 1
r
x
r
Cross into F 1
. Torque 1
is into the figure (negative y).
r τ
x
z
θ = 30°
φ 2
= 120°
O
( c )
F 2
r
x
z
F 2
r
F 2
FFF 2
FFFFFF 2
FF
Cross into
Torque 2
is out of
the figure (positive y).
F 2
r.
τ
x
r
z z z
z
and t 3
" rF 3
sin f 3
" (3.0 m)(2.0 N)(sin 90!)
" 6.0 N #m.
Next, we use the right-hand rule, placing t
the right hand so as to rotate into through t
the two angles between their directions. The thu
the direction of the torque.Thus t
:
1
is directed int
Fig. 11-11 b ; t
:
2
is directed out of the page in Fig
t
:
3
is directed as shown in Fig. 11-11 d. All three
tors are shown in Fig. 11-11 e.
:
r
:
a ) A particle at point A is acted on by three forces, each parallel to a coordinate axis.The angle f (used in finding torque) is shown d ( c ) for. ( d ) Torque t : 3 is perpendicular to both and (force F is directed into the plane of the figure). ( e ) The torques. : 3 F : 3 r : F : 2 dditional examples, video, and practice available at WileyPLUS A x y F 3 F 1 F 2 θ (^) O r x θ = 30° ( b ) φ 1 = 150° O F 1 x F 1 x F 1 Cross into F 1
. Torque
1 is into the figure (negative y). r τ x z θ = 30° φ 2 = 120° O ( c ) F 2 r x z F 2 r F 2 FFF 2 FFFFFF 2 FF Cross into Torque 2 is out of the figure (positive y). F 2 r. τ x z F 2 r z θ = 30° τ 3 θ F 3 r x z τ 3 r 3 r 3 r 3 x z τ 3 r 3 rr 333 r y z x 1 2 O τ 3 θ ( e ) τ τ The three torques. Cross into Torque 3 is in the xz plane. F 3 r. τ , TORQU E, AN D ANG U L AR M OM E NTU M the position vector are to see.) In Fig. 11-11 d , the angle be- tween the directions of and F is 90! and the symbol! : 3 r : rque on a particle due to a force agnitude 2.0 N, act on a ne at point A given by d u " 30 !. What is the h force? not lie in a plane, we udes given by Eq. 11- y the right-hand rule. torques with respect to for each cross product rmine the angle f be- force vectors of Fig. 11- e at the origin. Figures s of the xz plane, show F , respectively. (Note : 3 means F is directed into the page. (For out of the page, we : 3 would use ".) Now, applying Eq. 11-15, we find t 1 " rF 1 sin f 1 " (3.0 m)(2.0 N)(sin 150!) " 3.0 N #m, t 2 " rF 2 sin f 2 " (3.0 m)(2.0 N)(sin 120!) " 5.2 N #m, and t 3 " rF 3 sin f 3 " (3.0 m)(2.0 N)(sin 90!) " 6.0 N #m. (Answer) Next, we use the right-hand rule, placing the fingers of the right hand so as to rotate into through the smaller of the two angles between their directions. The thumb points in the direction of the torque.Thus t : 1 is directed into the page in Fig. 11-11 b ; t : 2 is directed out of the page in Fig. 11-11 c ; and t : 3 is directed as shown in Fig. 11-11 d. All three torque vec- F : r :
S
5 i
^ 1 2 j
^
S
5 2 2 i
^ 1 3 j
^ .
S
3 B
S
S
S
.
^ , j
^
^
4.0 m
2.0 m
1
S
^ 2 3 j
^ 1 4 k
^ 2
Angular Momentum Recall that the concept of linear momentum p : of linear momentum are extremely powerful tools. They allow us to predict the outcome of, say, a collision of two cars without knowing the details of the collision.
given by the right-hand rule: Position t the fingers are in the direction of. nd the palm to be in the direction of. mb gives the direction of!.
:
:
: A φ φ z x y p (= r × p ) p ( redrawn, with tail at origin) z ( a ) O φ r p ! !
p : (= m v ) as it passes through point A in an xy plane. The angular momentum ⃗ " of this particle with respect to the origin O is a vector quantity defined as
! r ! p! r ! mv , ! rp ! ! rmv ! !! rmv sin f your right hand so that Then rotate them arou Your outstretched thum ngular Momentum ecall that the concept of linear momentum and the principle of conservation f linear momentum are extremely powerful tools. They allow us to predict e outcome of, say, a collision of two cars without knowing the details of the col- sion. Here we begin a discussion of the angular counterpart of , winding up in odule 11-8 with the angular counterpart of the conservation principle, which an lead to beautiful (almost magical) feats in ballet, fancy diving, ice skating, and any other activities. Figure 11-12 shows a particle of mass m with linear momentum as passes through point A in an xy plane. The angular momentum of this parti- le with respect to the origin O is a vector quantity defined as (angular momentum defined), (11-18) here is the position vector of the particle with respect to O. As the particle oves relative to O in the direction of its momentum p , position vector : (! mv : ) r : ! : ! r : " p : ! m ( r : " v : ) ! : p : (! mv : ) p : p : where # ⃗ : is the position vector of the particle with respect to O.
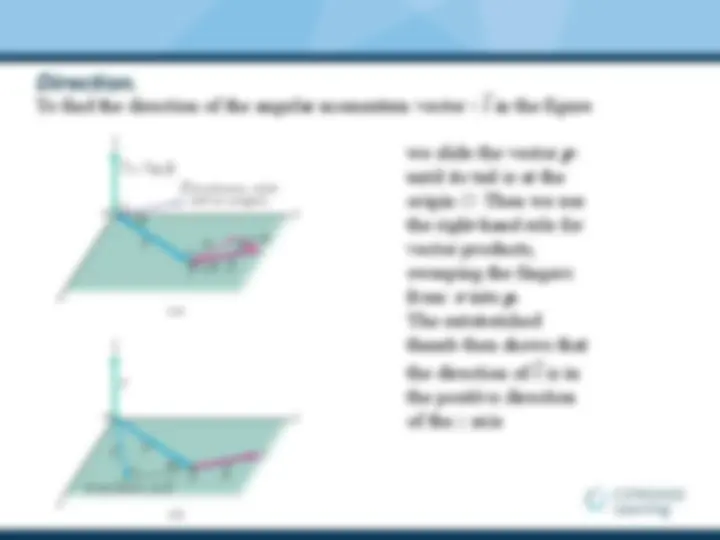
Direction.
To find the direction of the angular momentum vector ∶
⃗
that the fingers are in the direction of.
around the palm to be in the direction of.
thumb gives the direction of!.
:
p
:
r
Figure 11-12 Defining angular momentum.A
A
φ
φ
z
x
y
p
(= r × p )
p ( redrawn, with
tail at origin)
A
z
x
y
Extension of p
φ
( a )
( b )
O
O
φ
r r
r
p
p
!
!
we slide the vector p :
until its tail is at the
origin O. Then we use
the right-hand rule for
vector products,
sweeping the fingers
from : r into p.
The outstretched
thumb then shows that
the direction of
⃗
the positive direction
of the z axis