


Physics 211 –Spring 2003 Angular Momentum 1
Welcome back to Physics 211
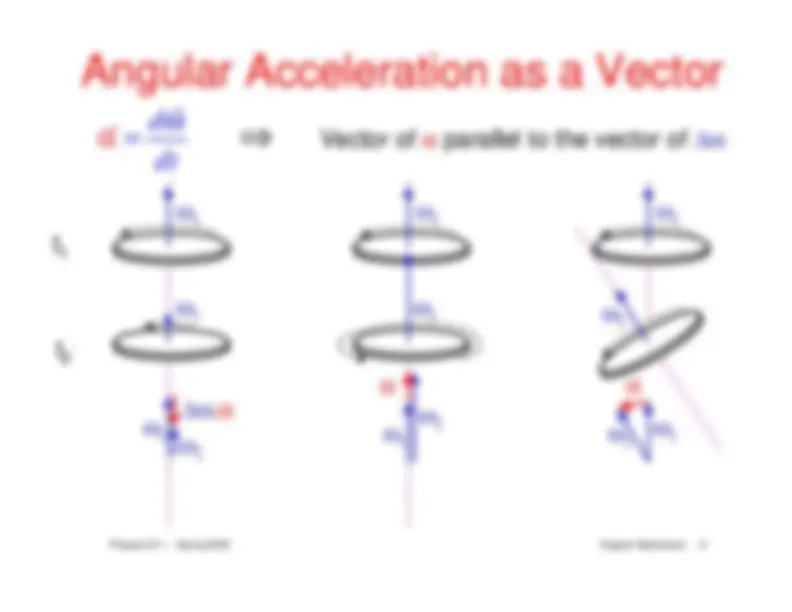
•Angular velocity and acceleration as vectors
•Vector Product
•Torque as a vector
•Angular Momentum
•Conservation of Angular Momentum


Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An overview of the concepts of angular velocity and acceleration, vector product, torque as a vector, and angular momentum in the context of physics 211 – spring 2003. It covers topics such as angular velocity as a vector, angular acceleration as a vector, torque as a vector, scalar and vector product of two vectors, and conservation of angular momentum.
Typology: Study notes
1 / 13

This page cannot be seen from the preview
Don't miss anything!
Angular Velocity as a Vector Line of ω − gives rotational axis Arrow of ω − distinguishes between clockwise and counter-clockwise rotation
ω
ω
ω
ω
right hand thumb rule
right-handed screw rule
Rotating object
Arrow of ω given by:
Torque as a Vector?
Ι α = τ
α is a vector ⇒^ τ is a vector
Physics 211 – Spring 2003 Angular Momentum 7
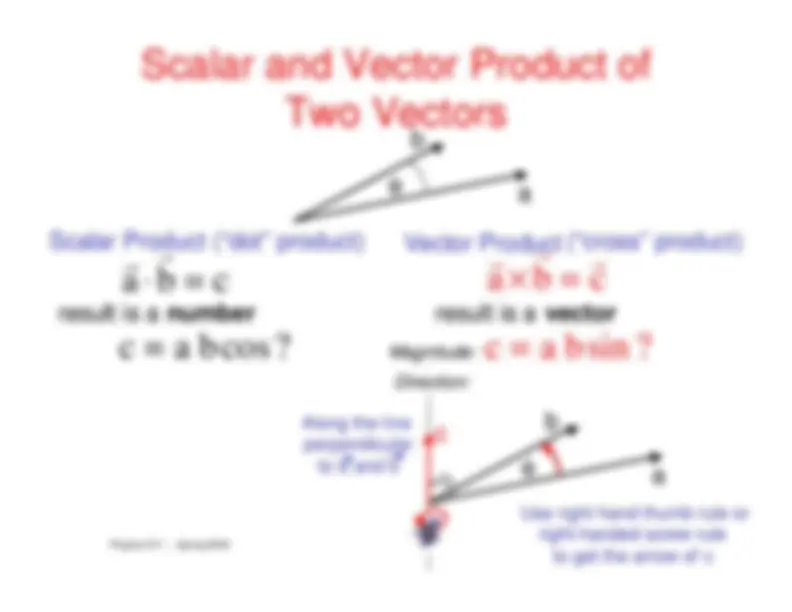
Scalar and Vector Product of
Two Vectors
θ
b
a
Scalar Product (^) Vector Product
a b = c⋅
r r (“dot” product)^ (“cross” product)
c = a b cos?
result is a number result is a vector
a × b = c
r r r
c = a b sin?
θ
b
a
c
Use right hand thumb rule or right-handed screw rule to get the arrow of c
Magnitude: Direction: Along the line perpendicular to a and b
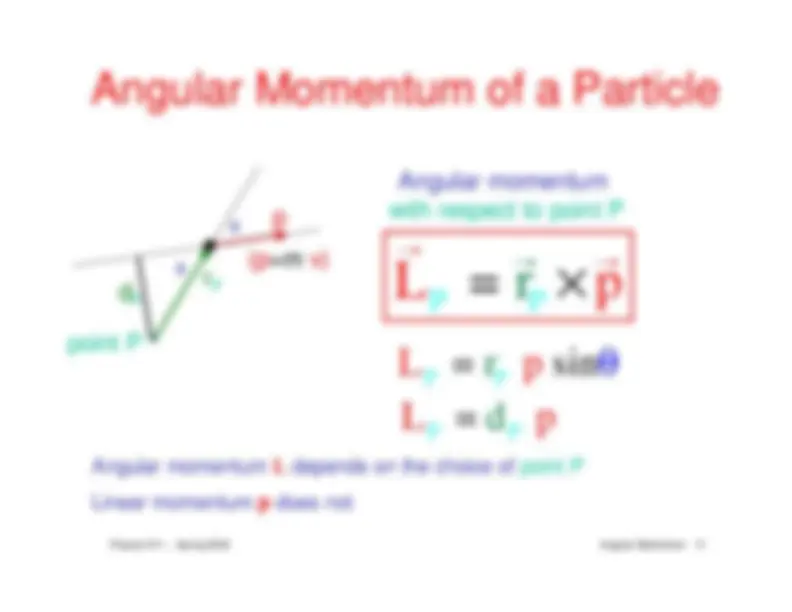
point P
rP
Torque with respect to point P
θ
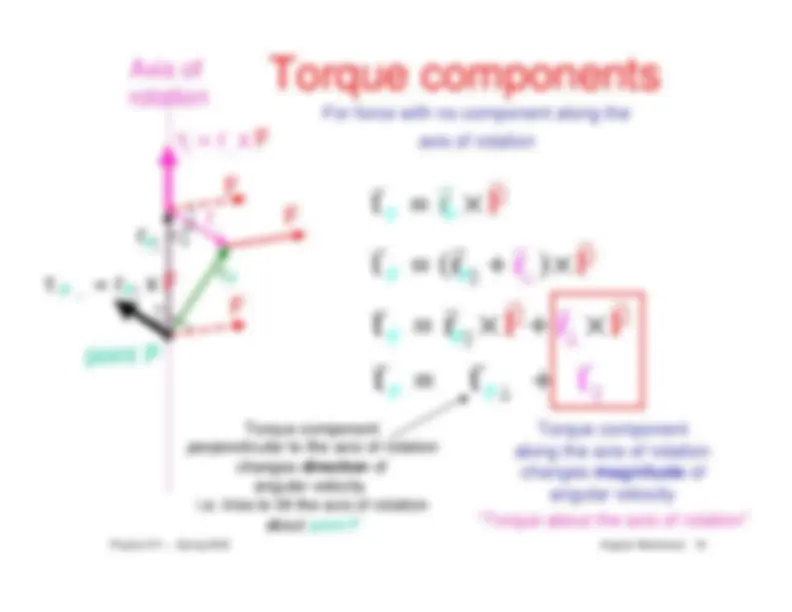
Torque components
point P
F t^ P^ =^ rP^ × F
r^ r^ r
rP¦
τ¦ = r- x F
r-
For force with no component along the axis of rotation
rP
τ (^) P - = rP¦ x F
Axis of rotation
t (^) P = (rP (^) P + r⊥ )×F
r r r r
Torque component along the axis of rotation changes magnitude of angular velocity “Torque about the axis of rotation”
Torque component perpendicular to the axis of rotation changes direction of angular velocity i.e. tries to tilt the axis of rotation about point P
P
p
p p = m v (^) constant
L = d p constant
d
P
p R
p
R
p changes direction
L = R p constant
Newton’s 2nd^ Law in Angular Form
dL d(r p)
dt dt
r (^) r r
dr dp p + r dt dt
= × ×
r r r r
= v × m v + r × F
r r r r
= 0 + t
r
dL t dt
=
r r
Conservation of Angular
Momentum
i
= (^) ∑
tot external net
i
= (^) ∑
tot external net
Angular Momentum (^) Linear Momentum
⇒
If there is no net external torque on the system, total angular momentum of the system is conserved