Download Search Algorithms in Artificial Intelligence: A Comprehensive Guide and more Cheat Sheet Artificial Intelligence in PDF only on Docsity!
Introduction to Computational
Intelligence
-Presented By:
Shawni Dutta,
Department of Computer Science,
The BES College
This Photo by Unknown author is licensed under CC BY.
SEARCHING
- Problem solving in artificial intelligence may be characterized as a systematic search
through a range of possible actions in order to reach some predefined goal or solution.
- In AI problem solving by search algorithms is quite common technique. In the coming
age of AI it will have big impact on the technologies of the robotics and path finding. It is
also widely used in travel planning.
- A search algorithm takes a problem as input and returns the solution in the form of an
action sequence.
- Once the solution is found, the actions it recommends can be carried out. This phase is
called as the execution phase.
- After formulating a goal and problem to solve the agent cells a search procedure to solve
it.
Search Technique
- Based on the search problems we can classify the search algorithms
into uninformed (Blind search) search and informed search (Heuristic search) algorithms.
Difference
between
Informed and
Uninformed
Search in AI
- Informed Search: Informed Search algorithms have information on the goal state which helps in more efficient searching. This information is obtained by a function that estimates how close a state is to the goal state. - Uninformed Search: Uninformed search algorithms have no additional information on the goal node other than the one provided in the problem definition. The plans to reach the goal state from the start state differ only by the order and length of actions.
Types of Uninformed Search
- It can be divided into five main types: - Breadth-first search - Uniform cost search - Depth-first search - Iterative deepening depth-first search - Bidirectional Search
Breadth First
Search (BFS)
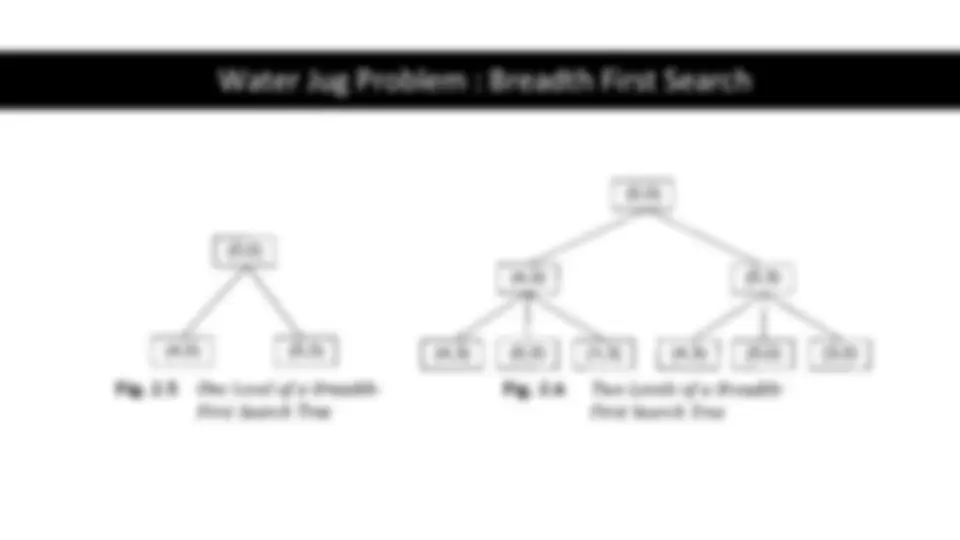
- Breadth first search is a general technique of traversing a graph. Breadth first search may use more memory but will always find the shortest path first.
- In this type of search the state space is represented in form of a tree. The solution is obtained by traversing through the tree.
- The nodes of the tree represent the start value or starting state, various intermediate states and the final state. In this search a queue data structure is used and it is level by level traversal.
- Breadth first search expands nodes in order of their distance from the root. It is a path finding algorithm that is capable of always finding the solution if one exists.
- The solution which is found is always the optional solution. This task is completed in a very memory intensive manner. Each node in the search tree is expanded in a breadth wise at each level.
Water Jug Problem : Breadth First Search
UNINFORMED
SEARCH:
Depth First
Search (DFS)
- DFS is also an important type of uniform search.
DFS visits all the vertices in the graph. This type of
algorithm always chooses to go deeper into the
graph.
- After DFS visited all the reachable vertices from a
particular sources vertices it chooses one of the
remaining undiscovered vertices and continues the
search.
- DFS reminds the space limitation of breath first
search by always generating next a child of the
deepest unexpanded nodded.
- The data structure stack or last in first out (LIFO) is
used for DFS.
Water Jug Problem : Depth First Search
Does
systematic
Problem
always help?
- For the water jug problem, most control strategies that cause motion and are systematic will lead to an answer.
- The problem is simple. But this is not always the case; in order to solve some problems during our lifetime, we must also demand a control structure that is efficient.
Traveling
salesperson
problem:
- A simple, motion causing and systematic control structure code, in principle, solve this problem it would simply explore all possible paths in the tree and return the one with the shortest length.
- This approach will even work in practice for very short list of cities. But it breaks down quickly as the number of cities grows.
- If there are N cities, then the number of different parts among them is 1, 2... (N – 1) or (N – 1) !.
- The time to examine a single part is proportional to N so the total time required to perform this search is proportional to N factorial.
- Assuming there are 10 cities, 10 factorial is 3, 628, 800. Which is very large number.
- The salesman could easily have 25 cities to visit. To solve this problem would take more time then he would be willing to spend this phenomenon is known as combinatorial explosion.
Informed Search
- Informed search algorithm contains an array of knowledge such as how far we are from the goal, path cost, how to reach to goal node, etc.
- This knowledge help agents to explore less to the search space and find more efficiently the goal node.
Example: Heuristic
- One example of a good general-purpose heuristic that is useful for a variety of combinatorial problems in the nearest neighbor heuristic, which works by selecting the locally superior alternative at each step. Applying it to the travelling salesman problem, we produce the following procedure- - 1.Arbitrarily select a starting city. - 2. To select the next city, look at all cities not yet visited, and select the one closest to the current city. Go to it next. - 3. Repeat step 2 until all cities have been visited.
Heuristic
function
- The heuristic method, however, might not always
give the best solution, but it guaranteed to find a
good solution in reasonable time.
- Heuristic function estimates how close a state is to
the goal.
- It is represented by h(n), and it calculates the cost
of an optimal path between the pair of states.
- The value of the heuristic function is always
positive.