


ECE385
DIGITAL SYSTEMS LABORATORY
© Janak H. Patel
Department of Electrical and Computer Engineering
University of Illinois at Urbana-Champaign
Experiment 5
Asynchronous Machine
Design





Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
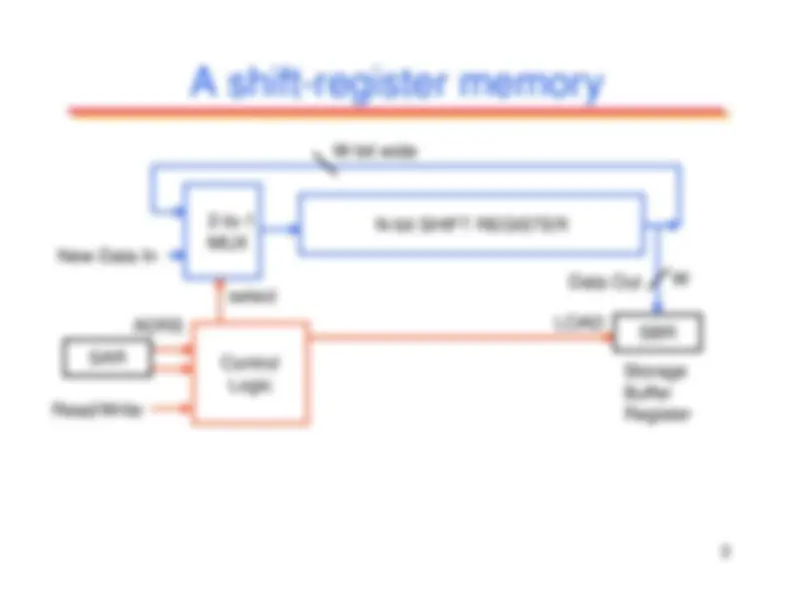
Information on experiment 5 of the digital systems laboratory course at the university of illinois at urbana-champaign, focusing on asynchronous machine design. Topics include shift register memory, ram with error detection, and designing an asynchronous robot platform controller using only gates and latches. Students are tasked with developing a symbolic state table, assigning binary encoding to states, and deriving latch-input equations.
Typology: Lab Reports
1 / 16

This page cannot be seen from the preview
Don't miss anything!
© Janak H. Patel Department of Electrical and Computer Engineering^ University of Illinois at Urbana-Champaign
Current Input
Output
All Switches down
Halt
All Switches down
Left
switch up
Go Straight
All Switches down
Right
switch up
Go Straight
All Switches down
Spin
switch up
Turn 180
Left^ switch up
Left, Right
both up^
Turn Left
Right^ switch up
Left, Right
both up^
Turn Right
Left|Right|Spin up
(Left or Right)& Spin
Stop/Error
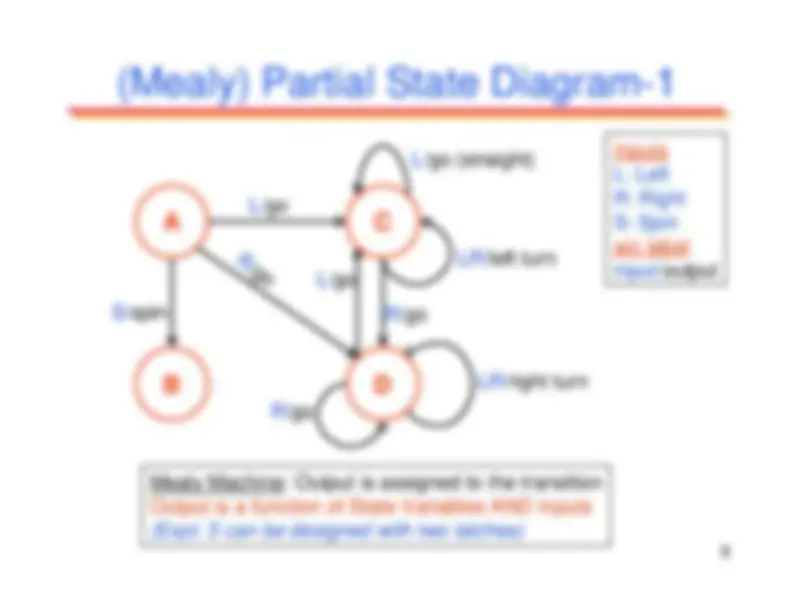
TurnLeft L go-str
TurnRight
Spin^180
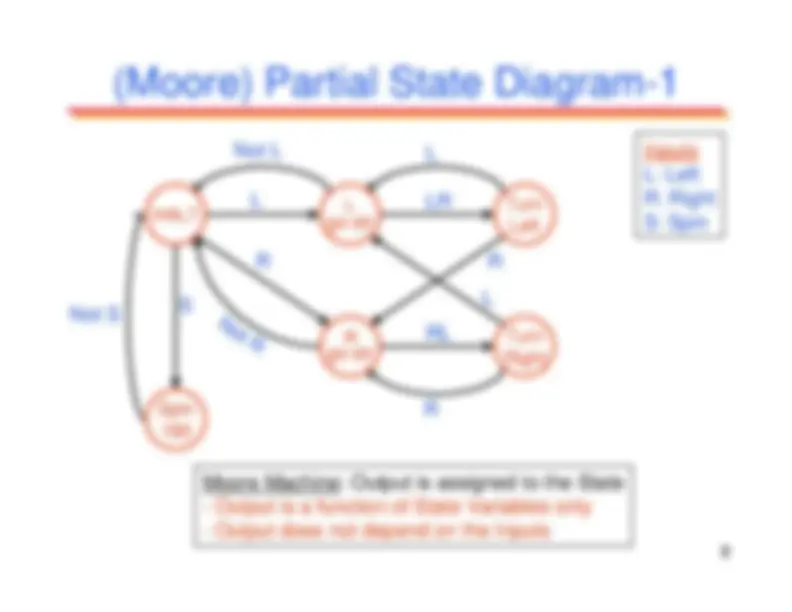
Not L
Not R Not S
Inputs L: Left R: Right S: Spin
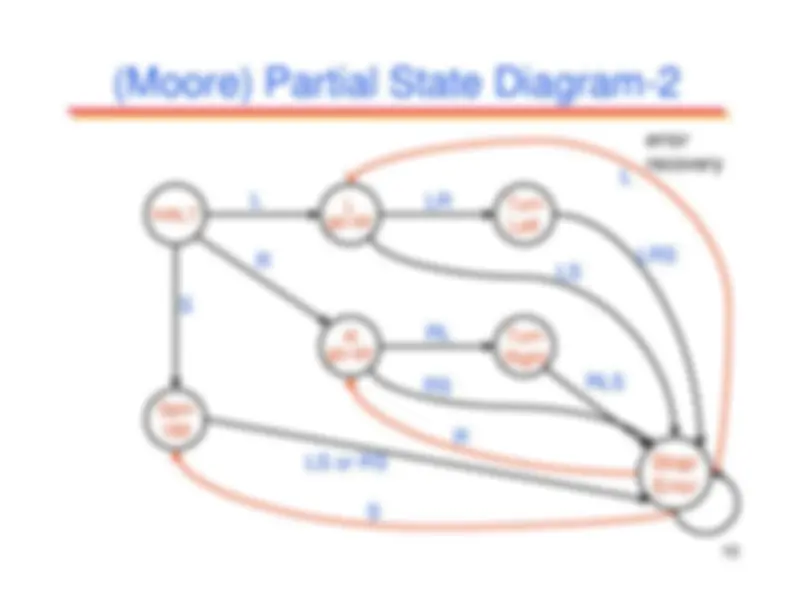
Rgo-str Moore Machine
: Output is assigned to the State
TurnLeft Lgo-str
TurnRight
Spin^180
LRS RLS^ Stop/Error
LS or RS
go-str
errorrecovery L R S
TurnLeft Lgo-str
TurnRight
Spin^180
100111 111 Stop/Error
010 101, 011^001
ErrorRecovery (^101011) Rgo-str
Input Combinations L,R,S Encoding: State
^000
010 100
110 101
Output 011 111
000 : A^ A^
B^ C^
D^ -^
-^ -^ -^ HALT
001 : B^ A^
B^ -^
-^ -^ E^ E^ -^ SPIN
010 : C^ A^
-^ C^ -^ F^ -^ E^ -^ GO STR
011 : D^ A^
-^ -^ D^ G^
E^ -^
-^ GO STR
111 : E^ -^
B^ C^
D^ E^
E^ E^
E^ ERROR
100 : F^ -^
-^ C^ D^ F^ -^ -^ E
RIGHT
110 : G^ -^
-^ C^ D^ G^ -^ -^ E
LEFT Next State
Intended Transition (State
,Input1)^ Æ^
(State2,Input2) may end up in (State
, Input2)
Transition (010:C
,010)^ Æ^ (100:F
,110) is a Critical Race. May end up in (110:G
,110)
Transition (011:D
,100)^ Æ^ (110:G
,110) is a Critical Race. May end up in (111:E
,110)
(There are 8! = 40,320 different state encodings possible for this state table using three state variables)
z^ Encode the states to avoidcritical races z^ Since output needs to be glitch-free, and the output is a functionof the latch outputs, all transitionsmust be race-free† z^ Encode the states such that twoadjacent states are HammingDistance 1 apart z^ If Distance-1 code not possible,one can insert dummy states tomake it possible
010 Partial State Diagram^ and a Distance-1 Encoding
Since complete race-free design is expensive, you may design to avoid only critical races