


Oct. 2007 Terminology, Models, and Measures Slide 1
Fault-Tolerant Computing
Basic Concepts
and Tools







Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This presentation covers the terminology, models, and measures related to dependability in fault-tolerant computing. It includes concepts such as impairments to dependability, the fault-error-failure cycle, the four-universe model, and multilevel models. The document also discusses the importance of dependability and various types of dependable computer systems.
Typology: Assignments
1 / 23

This page cannot be seen from the preview
Don't miss anything!
Oct. 2007
Terminology, Models, and Measures
Slide 1
Oct. 2007
Terminology, Models, and Measures
Slide 2
Edition
Released
Revised
Revised
First
Oct. 2006
Oct. 2007
This presentation has been prepared for the graduatecourse ECE 257A (Fault-Tolerant Computing) byBehrooz Parhami, Professor of Electrical and ComputerEngineering at University of California, Santa Barbara.The material contained herein can be used freely inclassroom teaching or any other educational setting.Unauthorized uses are prohibited. © Behrooz Parhami
Oct. 2007
Terminology, Models, and Measures
Slide 4
Oct. 2007
Terminology, Models, and Measures
Slide 5
ERROR
Failure
Oct. 2007
Terminology, Models, and Measures
Slide 7
Cause-effect diagram for Avižienis’ four-universemodel of impairments to dependability.
Oct. 2007
Terminology, Models, and Measures
Slide 8
Cause-effect diagram for an extended six-levelview of impairments to dependability.
Abstraction
Impairment
Component
Defect
⇓
⇓
Logic
Fault
⇓
⇓
Information
Error
⇓
⇓
System
Malfunction
⇓
⇓
Service
Degradation
⇓
⇓
Result
Failure
Low-Level Mid-Level High-Level
FirstCycle SecondCycle
Failure
Aspect
Impairment
Structure
Fault
⇓^
⇓
State
Error
⇓^
⇓
Behavior
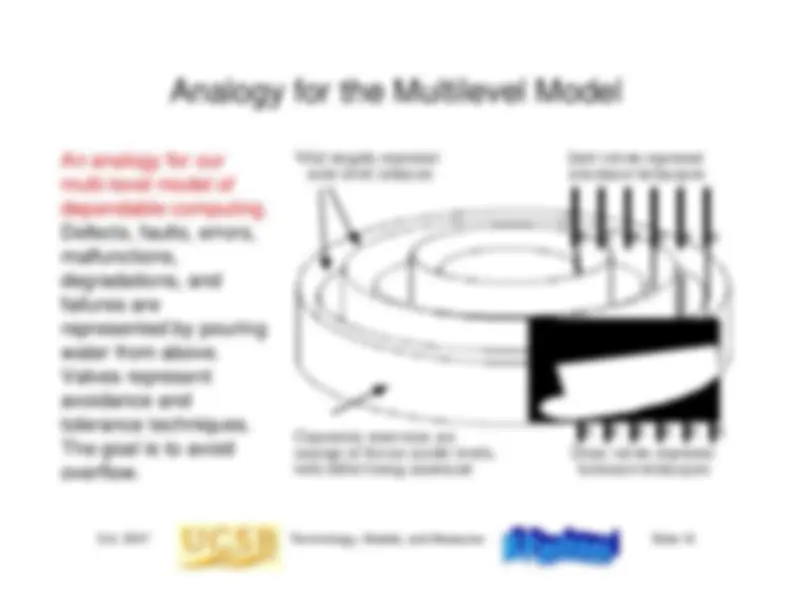
Oct. 2007
Terminology, Models, and Measures
Slide 10
An analogy for ourmulti-level model ofdependable computing.Defects, faults, errors,malfunctions,degradations, andfailures are represented by pouringwater from above.Valves representavoidance andtolerance techniques.The goal is to avoidoverflow.
Wall heights represent
inter-level latencies
Drain valves representtolerance techniques
Concentric reservoirs areanalogs of the six model levels,with defect being innermost
I I I I I
I^ I
I^
I^
I^
I^
I
Inlet valves representavoidance techniques
Oct. 2007
Terminology, Models, and Measures
Slide 11
Reliability of
n
-transistor system, each having failure rate
λ
- n
λ t
1.0 0.8 0.6 0.4 0.2 0.
–ne
tλ
.
.
.
.
.
10 10
8 10
6 10
4 10
nt
Alternative: Change the reliabilityformula by introducingredundancy in system
Oct. 2007
Terminology, Models, and Measures
Slide 13
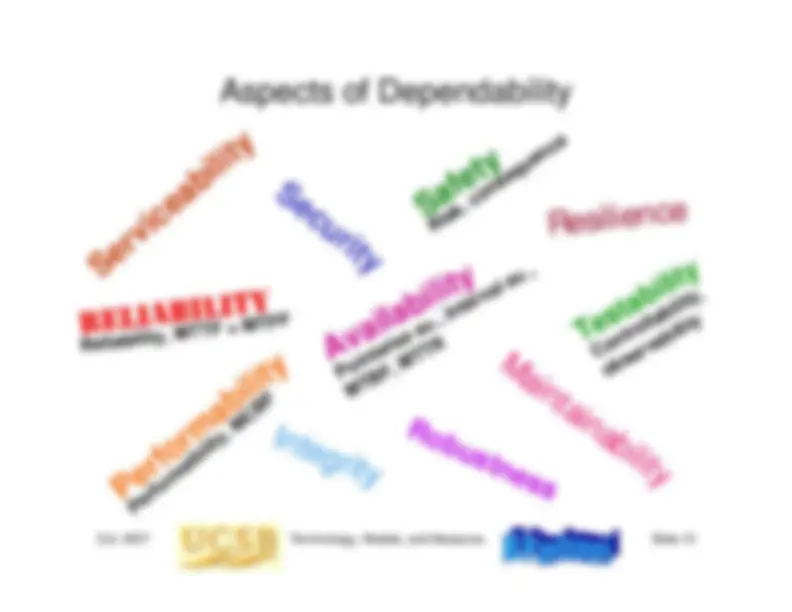
RELIABILITY
Serviceabilit
y
Reliability, MTTF = MTFF
Risk, conseque
nce
Controllability,
observability
Performability, MCBF
Pointwise av., Interval av., MTBF, MTTR
Oct. 2007
Terminology, Models, and Measures
Slide 14
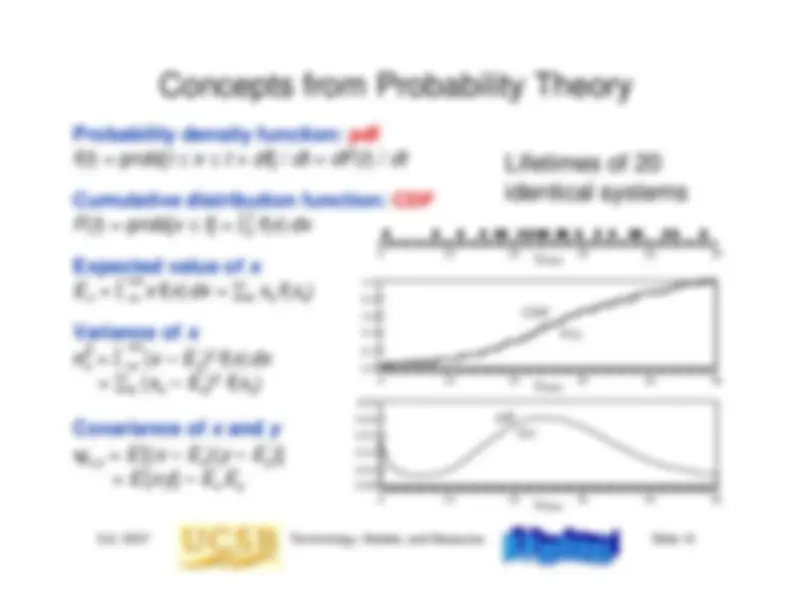
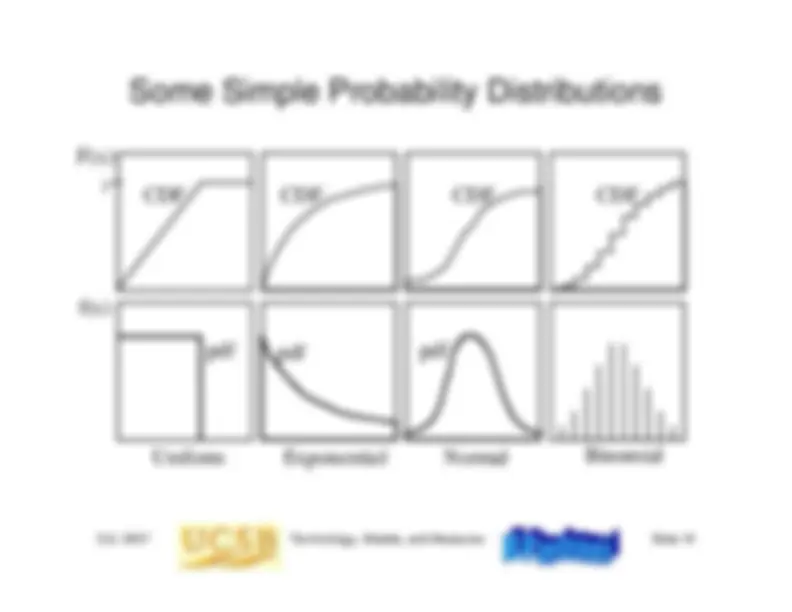
Cumulative distribution function: CDF F
( t
) = prob[
x ≤
t
] =
∫
0
f (
x )^ dx
t
Probability density function: pdf f (
t ) = prob[
t^
≤
x
≤
t
dt
] /
dt
=
dF
( t
) /
dt
Time
0
10
20
30
40
50
Time
0
10
20
30
40
50
Time
0
10
20
30
40
50
1.00.80.60.40.20.
CDF pdf
0.050.040.030.020.010.
F(t)
f(t)
Expected value of
x
E
x^
=
∫
−∞
x f
( x
)^ dx
=
∑
k^
x
fk ( x
) k
+∞
Covariance of
x
and
y
ψ
x , y^
=
E
[(
x
E
)( x
y
E
)] y
=
E
[ x y
] –
E
x^ E
y
Variance of
x
σ
x^
=
∫
−∞
( x
E
) x 2 f (
x )^ dx
=
∑
k^
( x
k^
E
) x 2
f (
x
) k
+∞
2
Oct. 2007
Terminology, Models, and Measures
Slide 16
Reliability:
R
( t
)
Probability that system remains in the“Good” state through the interval [0,
t
]
R
( t
dt
) =
R
( t
) [1 –
z
( t
)^ dt
]
Hazard function
Constant hazard function
z
( t
) =
λ ⇒
R
( t
) =
e
t
R (system failure rate is independent of its age)
( t
) = 1 –
F
( t
)^
CDF of the system lifetime, or its unreliability
Mean time to failure: MTTF MTTF =
∫
0
t f
( t
)^ dt
=
∫
0
R
( t
)^ dt
+∞
+∞
Expected value of lifetime
Area under the reliability curve(easily provable)
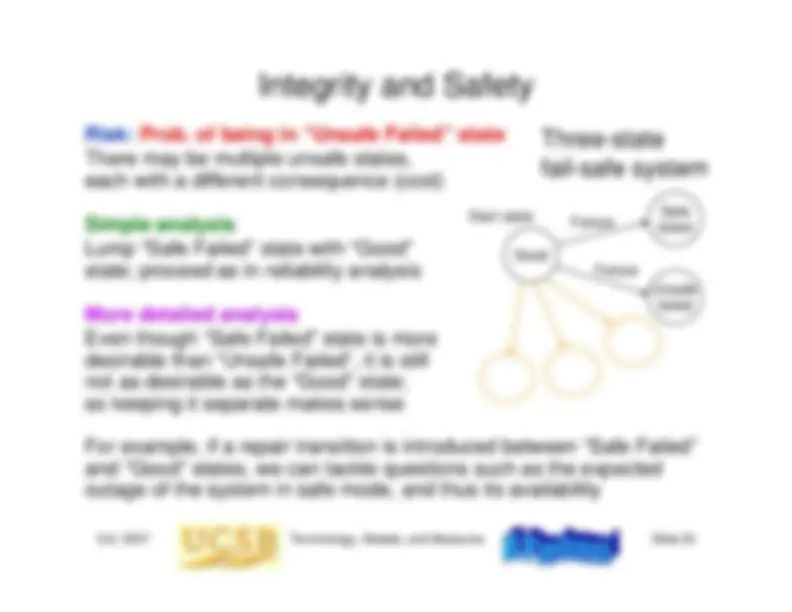
Startstate
Failure
Up
Down
Oct. 2007
Terminology, Models, and Measures
Slide 17
Exponential:
z
( t
) =
λ
R
( t
) =
e
t^
MTTF = 1/
λ
Weibull:
z
( t
) =
αλ
( λ
t )
α
-
R
( t
) =
e
(−λ
α t )
MTTF = (1/
λ
)^
Γ
(1 + 1/
α
)
Erlang:
MTTF =
k
/λ
Rayleigh: Gamma: Erlang and exponential are special cases Normal: Reliability and MTTF formulas are complicated
z
( t
) = 2
λ
( λ
t )
R
( t
) =
e
(−λ
(^2) t )
MTTF = (1/
λ
)^
√π / 2
Discrete versions Geometric^ R Discrete Weibull Binomial
( k
) =
q
k
Oct. 2007
Terminology, Models, and Measures
Slide 19
(Interval) Availability:
A
( t
)
Fraction of time that system is in the“Up” state during the interval [0,
t
]
Availability = Reliability, when there is no repair Availability is a function not only of how rarely a system fails (reliability)but also of how quickly it can be repaired (time to repair)
MTTF
MTTF
μ
MTTF + MTTR
MTBF
λ
μ
Pointwise availability:
a
( t
)
Probability that system available at time
t
A
( t
) = (1/
t )
∫
0
a
( x
)^ dx
t
Steady-state availability:
A =
lim
t →∞
A
( t
)
A
=
=
=
Repair rate1/
μ
= MTTR (Will justify thisequation later)
In general,
μ
λ
, leading to
A
≅
1
Repair
Startstate
Failure
Up
Down
Oct. 2007
Terminology, Models, and Measures
Slide 20
Time
Up Down
0
t
Time to first failure
Time between failures
Repair time t^1
t^2
t'^1
t'^2
Short repair time impliesgood
maintainability
(
serviceability
)
Repair
Startstate
Failure
Up
Down