


Probabilistic Reasoning Over
Time
Bayes Filter Implementations
Gaussian filters
























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An overview of probabilistic reasoning, specifically bayes filters, and their applications in state estimation and filtering. Topics include gaussian filters, markov assumption, causal vs. Diagnostic reasoning, combining evidence, and recursive bayesian updating. Examples are given using bayes filters for robot state estimation and measurement combination.
Typology: Study notes
1 / 44

This page cannot be seen from the preview
Don't miss anything!
Markov Assumption
Static world
Independent noise
Perfect model, no approximation errors
) , | ( ) , , |
(^
1
: 1 : 1 1 : 1
t t t t t t
t^
u x x p u z x x p −
−^
=
) | ( ) , , |
(^
: 1
: 1 : 0
t t
t
t t
t^
x z p u z x z p
=
Application •
)
| (^
: 1 t
t^
e x p
)
|
(^
: 1 t
k t^
e
x p
t
k )
|
(^
: 1
<
t
k^
e
x p
)
|
(^
: 1
: 1
t
t^
e
x p
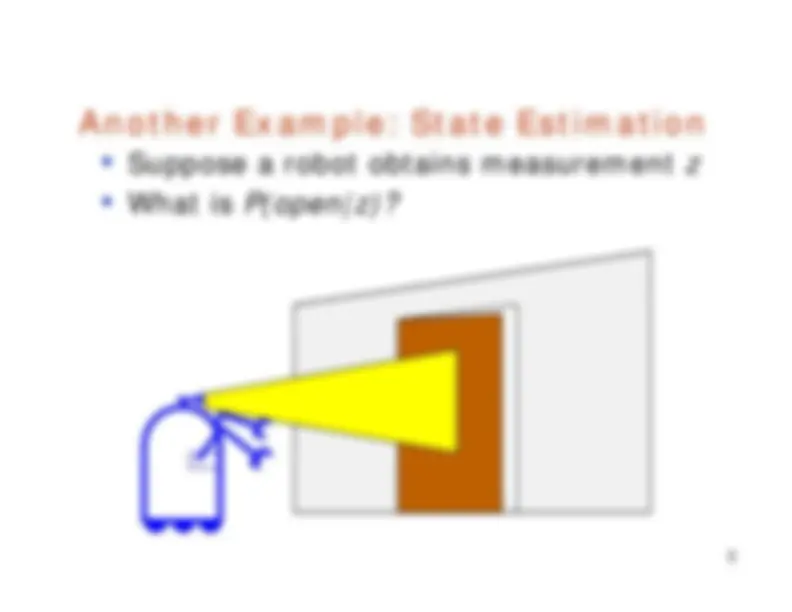
Suppose a robot obtains measurement
z
What is
P(open|z)?
Example •^
P(z|open) = 0.
P(z|
open) = 0.
-^
P(open) = P(
open) = 0.
Example •^
P(z|open) = 0.
P(z|
open) = 0.
-^
P(open) = P(
open) = 0.
(^67). 0 2 3
(^5). 0 (^3). 0 (^5). 0 (^6). 0
(^5). 0 (^6). 0
) |
(
) ( ) | ( ) ( ) | (
) ( ) | ( ) | (
=
=
⋅
⋅
⋅
=
¬
¬
= z
open P
open p
open
z P
open p
open z P
open P
open z P
z
open P •^ z
raises the probability that the door is open.
Combining Evidence •^
n^
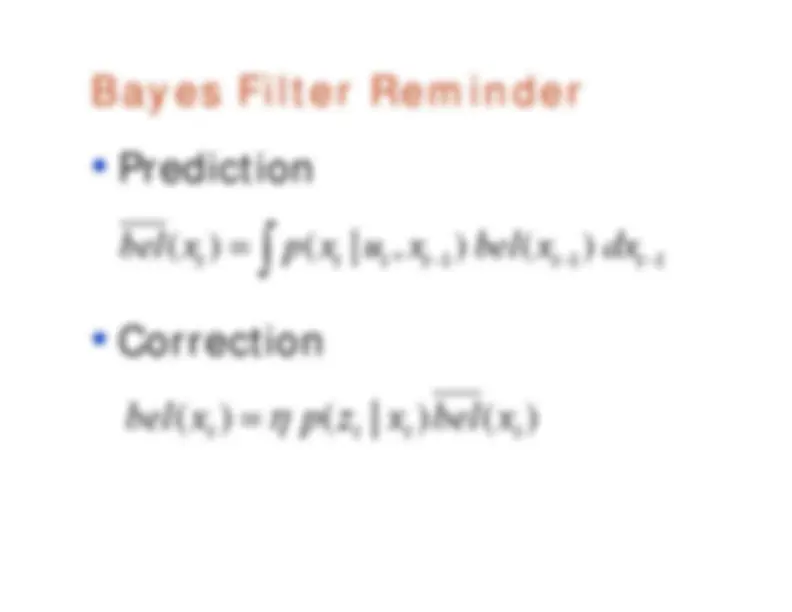
Recursive Bayesian Updating
)
, , | (
) , , | ( ) , , , | ( ) , , |
(^
1
1
1
1
1
1
1
−
−
−
=^
n
n
n
n
n
n
z
z z P
z z x P z z x z P z z x P
K
K
K
K
Example: Second Measurement^ •^
P(z
|open) = 0.5 2
P(z
open) = 0.
-^
P(open|z
14
Example: Second Measurement^ •^
P(z
|open) = 0.5 2
P(z
open) = 0.
-^
P(open|z
(^625). 0
5 8
1 3 3 5 2 3 1 2
2 3 1 2
) | ( ) | ( ) | ( ) | (
) | ( ) | ( ) , | (
1
2
1
2
1
2
1 2
=
= ⋅
⋅
⋅
=
¬
¬
=^
z
open P
open
z P
z
open P
open z P
z
open P
open z P
z z
open P • z
2
lowers the probability that the door is open.
Bayes Filter Algorithm^ 1.
Algorithm
Bayes_filter
(^
Bel(x),d
):
2.
η=
0
If
d
is a perceptual data item
z
then
For all
x
do
For all
x
do
Else if
d
is an action data item
u
then
For all
x
do
Return
Bel’(x)
) ( ) | ( )
('
x Bel x z P
x
Bel
=
) (' x Bel
=
η η
) ('
) ('
1
x
Bel
x
Bel
η
' )' (
)' , | (
) ('
dx x Bel x u x P
x
Bel
1
1
1
−
−
−
∫
t t t t t t t
t^
dx
x
Bel
x u x P x z P x
Bel
Bayes Filters are Familiar! •
Kalman filters
Particle filters
Hidden Markov models
Dynamic Bayesian networks
Partially Observable Markov DecisionProcesses (POMDPs)
1
1
1
−
−
−
∫
t t t t t t t
t^
dx
x
Bel
x u x P x z P x
Bel
A Simple Example •
Assume you and your friend riding a boat
You do a location measurement at time t(only one dimensional)
A Simple Example (2) •