Download Bayesian Spatial Prediction - Spatial Statistics - Slides | ST 790M and more Study notes Statistics in PDF only on Docsity!
Bayesian spatial prediction
kriging, the In the conventional geostatistical approaches for interpolation, i.e.
covariance structure is estimated first, and then the
parameters on subsequent predictions.a general methodology for taking into account the uncertainty aboutA Bayesian approach to interpolation of spatial processes will provideuncertainty in the covariance structure on subsequent predictions.understood, and it is common practice to ignore the effect of theinterpolants based on an estimated covariance structure are not wellestimated covariance is used for interpolation. The properties of the
24
observations of a vector field,The prediction problem can be stated in the following form: given
Z = { Z ( x 0 )
, Z
( x
2 ) ,... , Z
( x n ) } ,
predict the value
Z
( x
0 ) =
z 0 , for some
x
0
/∈ {
x 1 ,... ,
(^) x
n }
. We can
extends to the case where these parameters are unknown.kriging predictor when the model parameters are known, but it alsoThe Bayesian approach leads to the same answers as the standardkriging estimator and is the one most commonly given in textbooks.The Lagrange multiplier approach is the most direct derivation of themultipliers, and a Bayesian approach.take two approaches to this: an approach based on Lagrange
25
When the goal is to predict
Z
( x 0 ) =
z 0 , the Bayesian solution is the
posterior predictive distribution of
Z
( x
0 ) given the observations
Z
,
π ( Z ( x 0 ) | Z ) ∝ ∫ π ( Z ( x ) |
Z,
φ ) π ( φ | Z ) d φ.
(12)
where
π
( φ
| Z
) is the posterior of the model parameters. In the
kriging prediction, the model parameters
φ
= (
β, α, θ
) are estimated
they are treated as known for the subsequent prediction.using a likelihood approach or using empirical methods, and then
27
−
−
0
20
40
60
−60 −40 −20 0 20 40
predicted values
locations$x
locations$y
−
−
0
20
40
60
−60 −40 −20 0 20 40
prediction variance
locations$x
locations$y
posterior predictive distribution Figure 6: Bayesian kriging for fish data, and estimated variance of the
28
To remove the conditioning on
β
, we write
π
( z 0 | Z, α, θ
) =
∫ π ( z 0 |
Z, β, α, θ
) π ( β
| Z, α, θ
) dβ
(14)
Note that the posterior distribution of
β
, given
Z, α
and
θ , is
multivariate normal with mean
̂ β
=
̂ β
( θ ) (i.e. the GLS estimator of
β
given the covariance matrix
V
( θ )), and covariance matrix
α
( X
T
V^
( θ ) − 1 X ) − 1
(when the prior for
β
is uniform).
Then, the conditional distribution of
z 0
given
α
and
θ
is multivariate
normal with mean
̂^ z 0 ( θ ) = (
x 0 − X T Σ − 1 τ
(^) ) T
̂ β^
τ (^) T
Σ
−
1 Z
= (
x 0 − X T V ( θ ) − 1 w ( θ
))
T
̂ β + w ( θ ) T
V^
( θ ) − 1 Z
(15)
30
( and covariance matrix x 0
−
X
T
Σ^
−
1 τ (^) ) T
(^ X
T
Σ^
− 1 X ) − 1 ( x 0 − X T
Σ^
−
1 τ (^) ) +
σ 0
−
τ (^) T
Σ^
−
1 τ
= α { ( x 0 − X T
V^
( θ ) − 1 w ( θ
))
T
(^ X
T
V^
( θ ) − 1 X ) − 1 ( x 0 − X T
V^
( θ ) − 1 w ( θ
))
(^) T
V^
( θ ) − 1 τ
(^) }
=
αV
0 ( θ )
say
.
(16)
The next step is to remove the conditioning on
α
.
We have,
π
( z 0 | Z, θ
) =
∫ π ( z 0 |
Z, α, θ
) π ( α
| Z, θ
) dα.
(17)
Define
̂^ α ( θ ) =
G
2 ( θ )
n
−
q
.
31
Finally, we integrate over
θ
to obtain
π ( z 0 | Z
) =
∫ π ( z 0 |
Z, θ
) π ( θ | Z )
dθ
(19)
straightforward since for most models of interest the dimension ofThis part has to be carried out numerically, but should be
θ
is
Rao-Blackwellized estimatorThe predictive distribution can be approximated by theApproximating the PPD2 or at most 3.
:
π ( z 0 | Z
) =
m
m
i ∑
π ( z 0 | Z, θ
( i ) )
where
θ ( i )
constitute the
i -th draw from the posterior distribution.
33
The Hastings-Metropolis algorithm. We start with an arbitraryAlgorithm to simulate from the posterior distribution
x
(0)
and generate a new “trial value”
x ′
from some distribution
q ( x ′ ; x
(0)
)
which depends on
x
(0)
.Then form the ratio
α
=
q ( x (0)
; x ′ ) l ( x ′ )
q ( x ′ ; (^) x
(0)
) l ( x (0)
) (^).
If
α
≥
1 then we accept
x
′ ; in other words, set
x
(1)
=
x ′
. If
α <
1, we
perform an independent random drawing: with probability
α
, accept
x
′
and set
x
(1)
=
x
′ ; otherwise, reject
x ′
and set
x (1)
=
x (0)
.
34
distributions, because instead of updatingThus, Gibbs sampling consists purely in sampling from conditional
φ
in block
, it is more
computationally efficient to divide
φ
into components and then
update these components one by one.
36
25 30 35 40 45 50
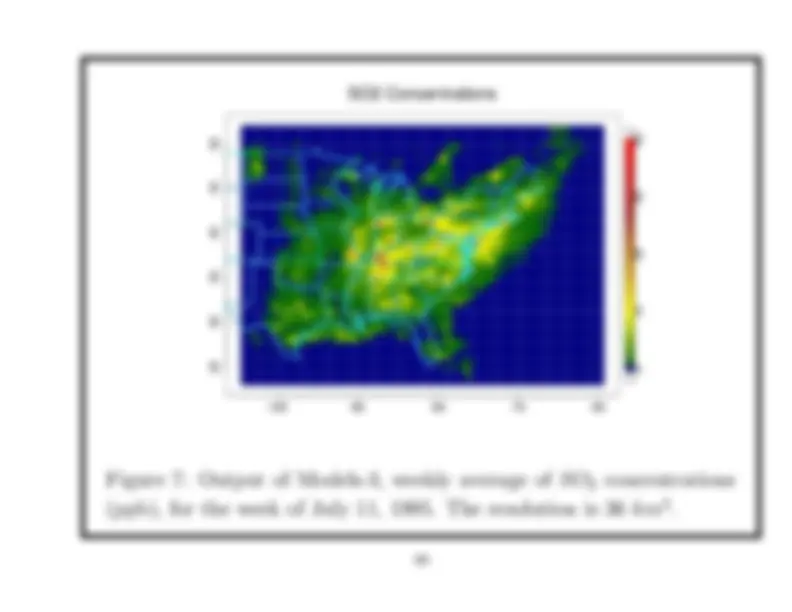
0 10 20 30 40
SO2 Concentrations
Figure 7: Output of Models-3, weekly average of
SO
2
concentrations
(ppb), for the week of July 11, 1995. The resolution is 36
km
2 .
46
SO2 concentrations (CASTNet) Figure 9: Weekly average of SO 2 concentrations (ppb) at the Clean 11, 1995.Air Status and Trends Network (CASTNet) sites, for the week of July
- 1. - 5. - 1. - 3. - 0. - 0.33 3. - 3. - 0. - 1. - 0. - 0. - 1. - 0. - 1. - 1.
- - 1. - 4. - 1. - 1. - 2. - 3. - 1. - 1. - 0. - 0. - 4. - 1. - 1. - 1.
- - 3. - 2. - 1. - 2. - 0.
0 10 20 30 40 50
Maine
(^0)
50
100
150
200
Illinois
North Carolina
0 10 20 30 40 50
Indiana
0 10 20 30 40 50
Florida
Michigan
0
50
100
150
200
Posterior distribution for RANGE
Percent of Total
Air pollutant: SO
Figure 10:
Posterior distributions for the range parameter (km) of
the Mat´
ern covariance for Models-
SO
2
concentrations, for the week
starting July 11, 1995. At 6 selected locations.
49
25 30 35 40 45 50
0 5 10 15 20 25
Sill for SO
parameter of the Mat´ Figure 12: Map of the modes of the posterior distributions for the sill
ern covariance for Models-
SO
2
concentrations,
for the week starting July 11, 1995.
51
Longitude Effect for the Sill parameter
Longitude (degrees)
-0.2 -0.1 0.0 0.
Latitude Effect for the Sill parameter
Latitude (degrees)
25
30
35
40
45
50
-0.4 0.0 0.2 0.4 0.
Distance (1 unit =36 km)
Semivariogram Values
(^0)
10
20
30
0 2 4 6 8
Semivariogram for the Sill parameter
Smoothing = .09Nugget = 0Sill = 9.2Range = 1296 km
Longitude effect (
r i ’s), latitude effect (
c j (^) ’s) and semivariogram of the error
term (
≤ σ (^) ) for the sill parameter (
σ ), where
σ ( s i , s
j (^) ) =
a (^) +
(^) r i
(^) c j
(^) ≤ σ (^) ( s i , s
j (^) )
and the process
≤ σ
has a Mat´
ern stationary covariance with parameters
τ
0 .
In the bottom graph we plot the Mat´
ern covariance model of the the error
term (
≤ σ (^) ), the covariance parameters for this Mat´
ern model are the modes
of the posterior for the hyperparameters
τ 0 .
52