



Beam Sensor Models
TexPoint fonts used in EMF.
Read the TexPoint manual before you delete this box.:
AAAAAAAAAAAAA
docsity.com



Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This lecture is part of complete lecture series on Advanced Robotics course. Electrical engineering students can get all relevant help from these lectures. This lecture includes: Beam Sensor Models, Proximity Sensors, Typical Measurement Errors, Measurement Noise, Unexpected Obstacles, Resulting Mixture Density, Raw Sensor Data, Approximation Results, Influence of Angle to Obstacle
Typology: Slides
1 / 19

This page cannot be seen from the preview
Don't miss anything!
2 Proximity Sensors
4
=
K k k
1
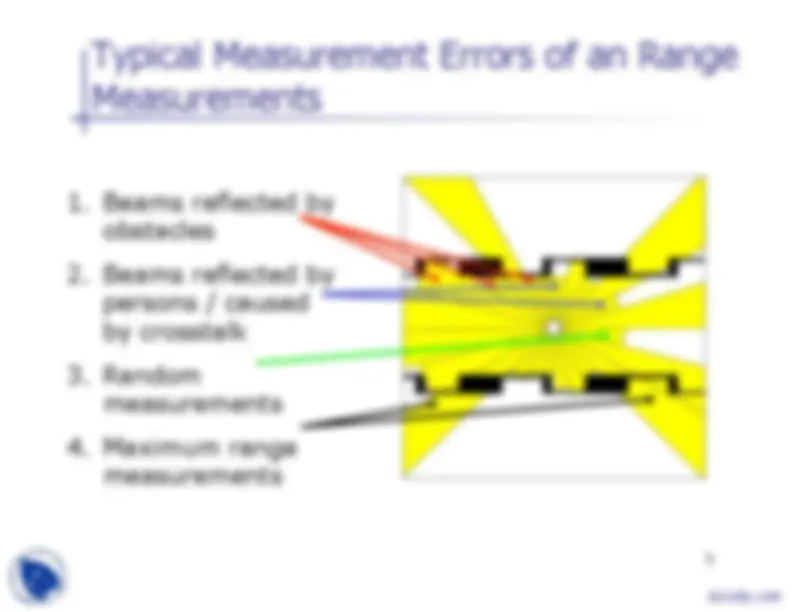
5 Typical Measurement Errors of an Range Measurements
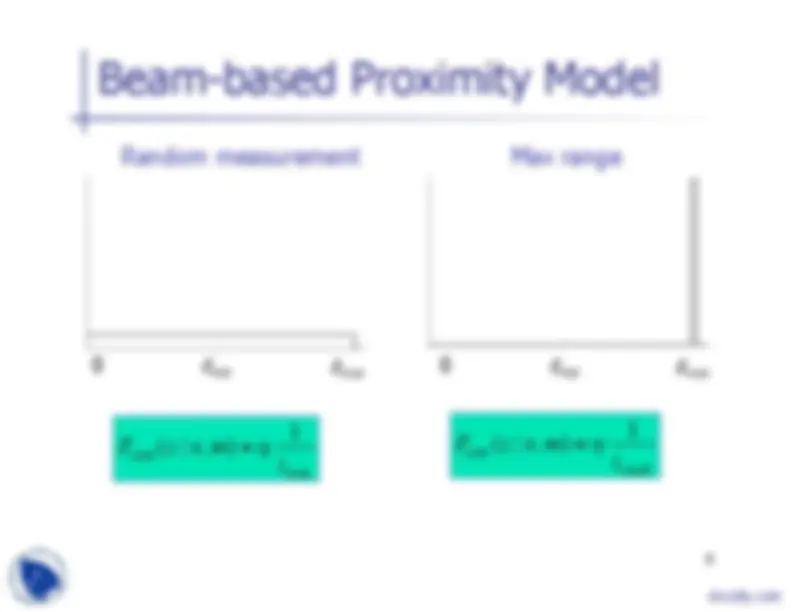
7 Beam-based Proximity Model
zexp z (^0) max b z z hit e b P z x m 2 ( exp ) 2 1 2
− − = π η ⎭
− otherwise z z P z x m z 0 e ( | , ) exp unexp λ η λ
zexp z (^0) max
8 Beam-based Proximity Model
max
z P z x m rand
small z P z x m
max = η zexp z (^0) max zexp z (^0) max
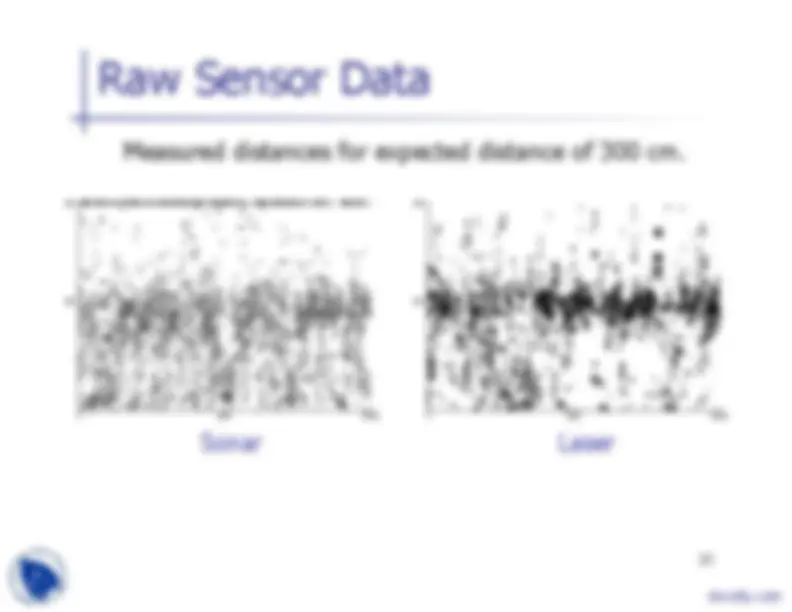
10 Raw Sensor Data
11 Approximation
( | ) exp P z z
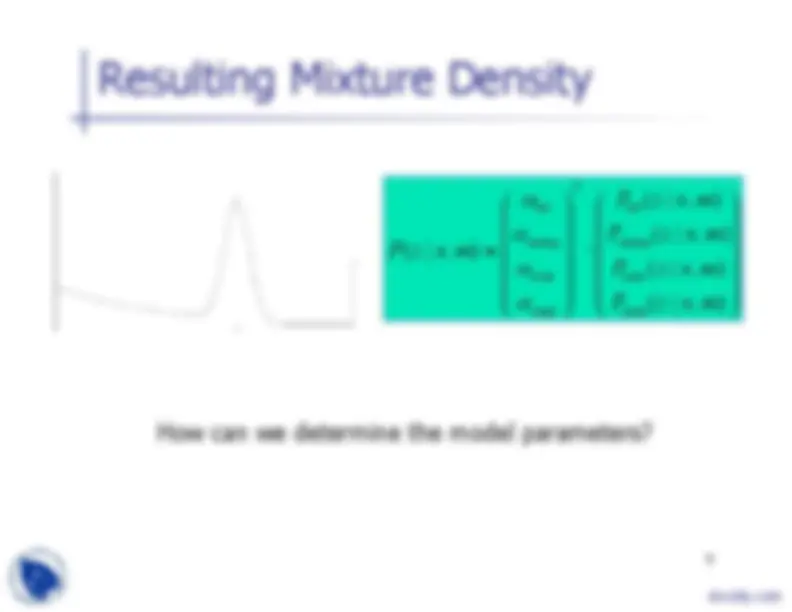
13 Example z P(z|x,m)
15 Approximation Results
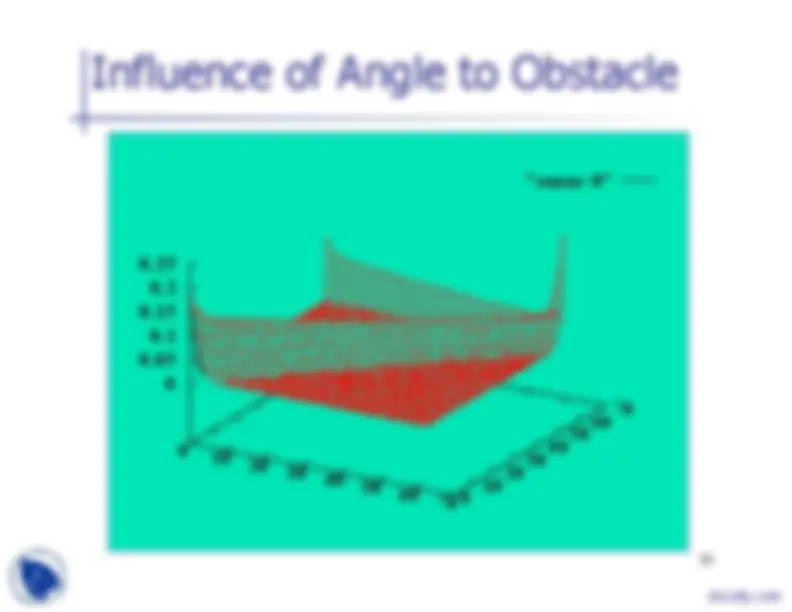
17 **"sonar-1" 0 10 20 30 40 50 60 70 0 10 20 30 40 50 60 70 0
0.** Influence of Angle to Obstacle
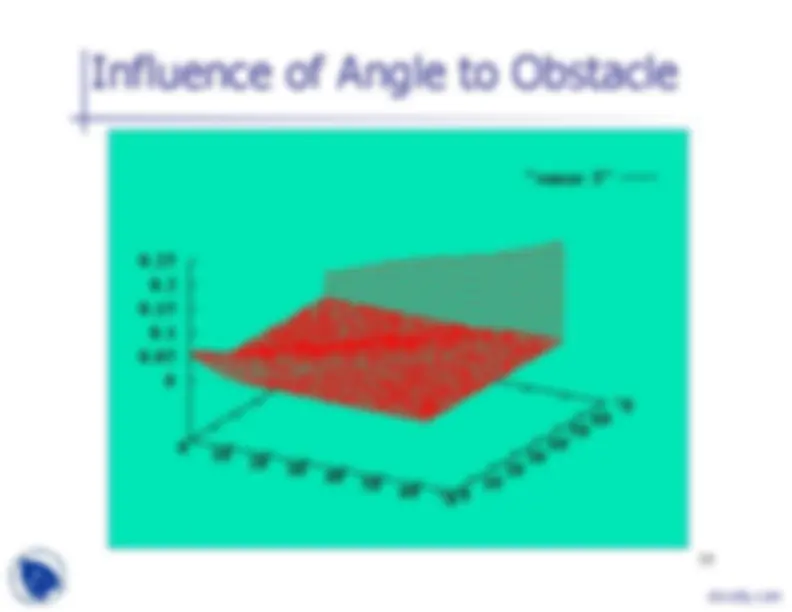
18 **"sonar-2" 0 10 20 30 40 50 60 70 0 10 20 30 40 50 60 70 0
0.** Influence of Angle to Obstacle
20 Summary Beam-based Model
n Justification? n Overconfident!
n Mixture of densities for these causes. n Assumes independence between causes. Problem?
n Learn parameters based on real data. n Different models should be learned for different angles at which the sensor beam hits the obstacle. n Determine expected distances by ray-tracing. n Expected distances can be pre-processed.