



GraphSLAM
TexPoint fonts used in EMF.
Read the TexPoint manual before you delete this box.:
AAAAAAAAAAAAA
docsity.com



Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This lecture is part of complete lecture series on Advanced Robotics course. Electrical engineering students can get all relevant help from these lectures. This lecture includes: Graphslam, Graph Based Formulation, Kuka Production Site, Lool Closing, Visual Odometry, Problem Formulation, Goal
Typology: Slides
1 / 13

This page cannot be seen from the preview
Don't miss anything!
n Use a graph to represent the problem n Every node in the graph corresponds to a pose of the robot during mapping n Every edge between two nodes corresponds to the spatial constraints between them n Goal : Find a configuration of the nodes that minimize the error introduced by the constraints
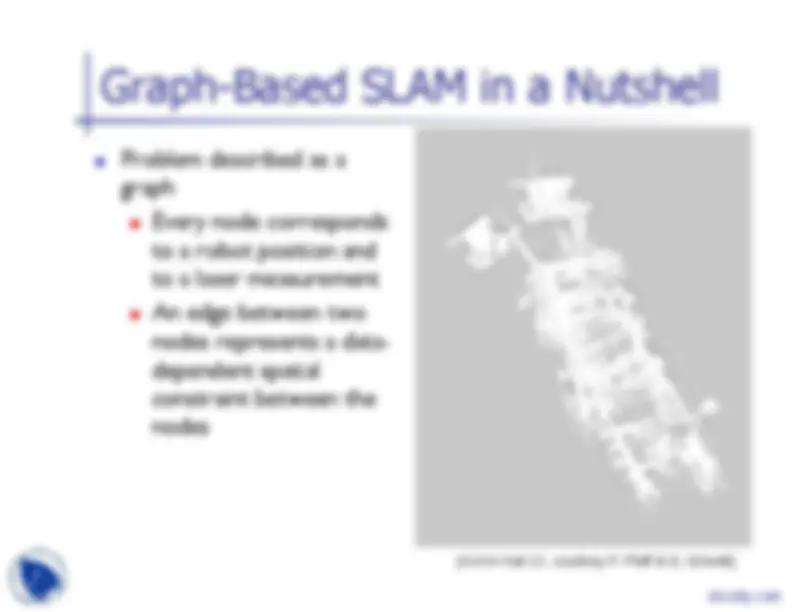
n Problem described as a graph n Every node corresponds to a robot position and to a laser measurement n An edge between two nodes represents a data- dependent spatial constraint between the nodes [KUKA Hall 22, courtesy P. Pfaff & G. Grisetti]
n Once we have the graph, we determine the most likely map by “moving” the nodes [KUKA Hall 22, courtesy P. Pfaff & G. Grisetti]
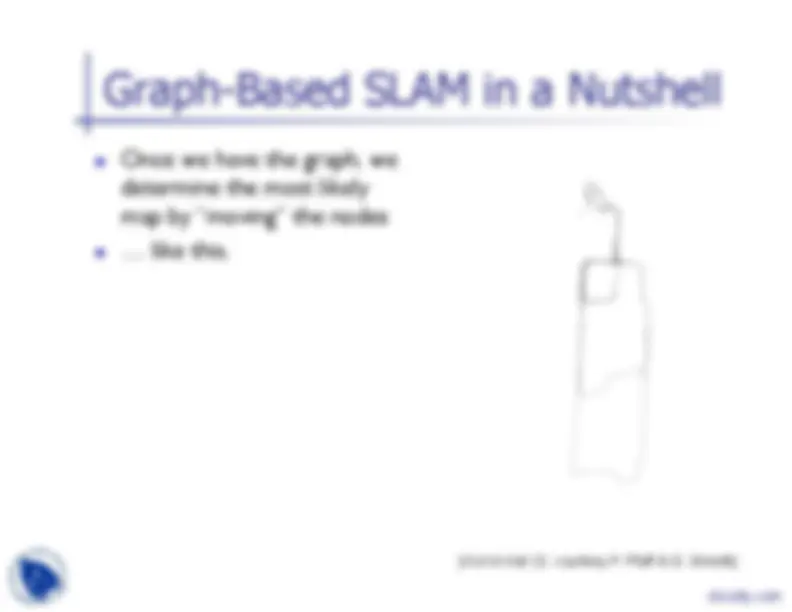
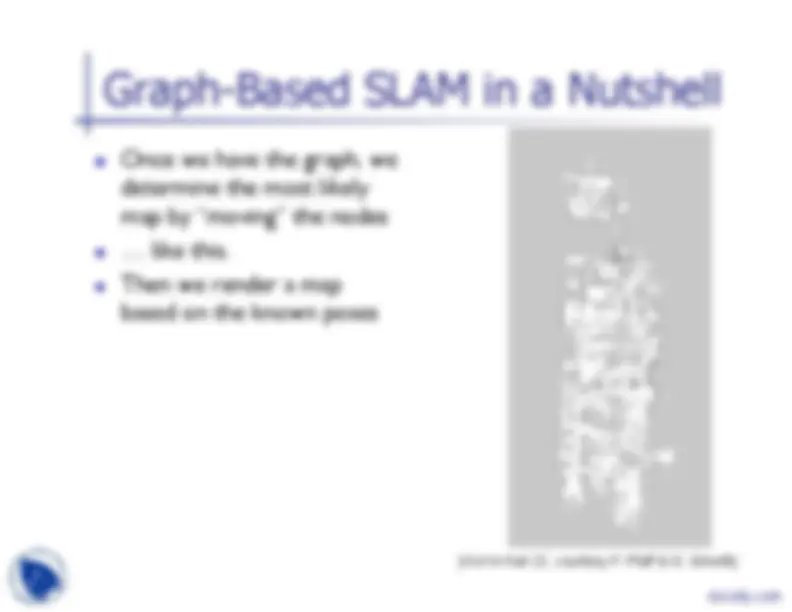
n Once we have the graph, we determine the most likely map by “moving” the nodes n … like this. [KUKA Hall 22, courtesy P. Pfaff & G. Grisetti]
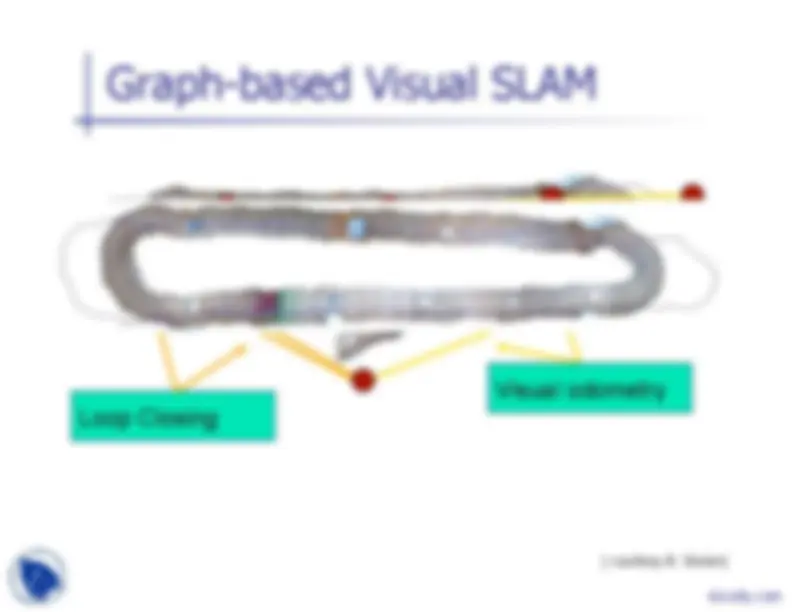
Visual odometry Loop Closing [ courtesy B. Steder]
scans 59668 total acquisition time 4,699.71 seconds traveled distance 2,587.71 meters total rotations 262.07 radians size 180 x 110 meters processing time < 30 minutes