



Behavior-
Based
Approaches
Docsity.com
















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This course is about robots intelligence. As course progress, interest in course raises. Keywords of the lecture are: Behavior Based Approaches, Finishing Up Robotic Architecture, Reactive Control, Motor Schemas, Subsumption, Robot Architecture, Getting Around, Perceiving the World, Motion Planning, Representing Space
Typology: Slides
1 / 31

This page cannot be seen from the preview
Don't miss anything!
Overview
Reasoning
representing space motion planning
Overview
Handling uncertainty sensor fusion building maps localization
Overview
ARCHITECTURES
percepts is organized
dynamic environments
the same agent design problem that was discussed
Situated automata
and robotics researchers have begun to question the “classical” view of intelligent agent design based on representation and manipulation of explicit knowledge
view is that explicit reasoning about the effects of low-level actions is too expensive to generate real time behavior
Situated automata
provided by sensors connected to the environment and whose outputs are connected to effectors
implementation of reflex agents with state
CONFIGURATION SPACES: A FRAMEWORK FOR ANALYSIS
how much / how do we represent the world internally?
2 Just the current world. Purely Reactive Control
Robot Architectures
One view of reactive control
Control is a function of the sensed data.
Case 1: If sonars 12, 13, or 14
Turn left at 20 deg./sec Case 2: If sonars 15, 0, or 1 Turn left at 40 deg./sec Case 3: If sonars 2, 3, or 4 Turn right at 20 deg./sec 1 0 2 3 4
(^15 ) 13 12
Robot Architecture
how much / how do we represent the world internally?
(^3) Just what we need. Subsumption paradigm
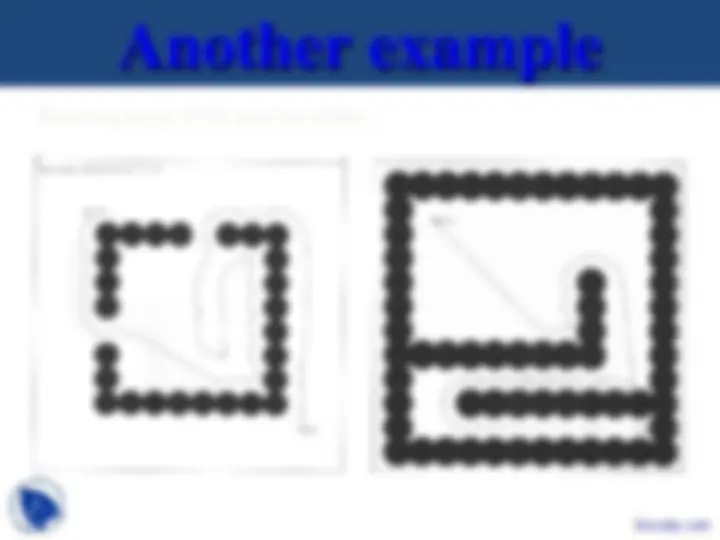
Motor Schema
Ron Arkin @ Georgia TechDocsity.com
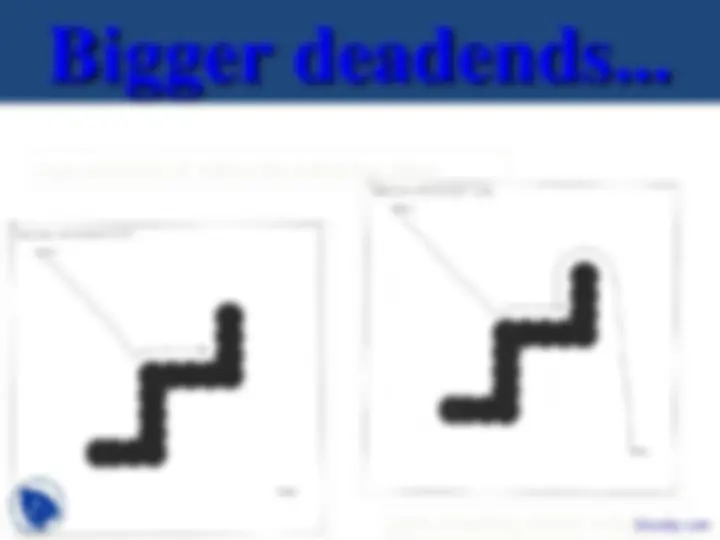
Behavior Summer
vector sum of the avoid and goal motor schemas
path taken by a robot controlled by the resulting field