



Boundary Value Problems
Numerical Methods for BVPs
Outline
1Boundary Value Problems
2Numerical Methods for BVPs
Michael T. Heath Scientific Computing 2 / 45










































































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Numerical Methods for BVPs. Shooting Method. Finite Difference Method. Collocation Method. Galerkin Method. Finite Difference Method.
Typology: Lecture notes
1 / 93

This page cannot be seen from the preview
Don't miss anything!
Boundary Value Problems Numerical Methods for BVPs
(^1) Boundary Value Problems (^2) Numerical Methods for BVPs Michael T. Heath Scientific Computing 2 / 45
Boundary Value Problems Numerical Methods for BVPs Boundary Values Existence and Uniqueness Conditioning and Stability
Side conditions prescribing solution or derivative values at specified points are required to make solution of ODE unique For initial value problem, all side conditions are specified at single point, say t 0 For boundary value problem (BVP), side conditions are specified at more than one point kth order ODE, or equivalent first-order system, requires k side conditions For ODEs, side conditions are typically specified at endpoints of interval [a, b], so we have two-point boundary value problem with boundary conditions (BC) at a and b. Michael T. Heath Scientific Computing 3 / 45
Boundary Value Problems Numerical Methods for BVPs Shooting Method Finite Difference Method Collocation Method Galerkin Method
Finite difference method converts BVP into system of algebraic equations by replacing all derivatives with finite difference approximations For example, to solve two-point BVP u 00 = f (t, u, u 0 ), a < t < b with BC u(a) = ↵, u(b) = � we introduce mesh points ti = a + ih, i = 0, 1 ,... , n + 1, where h = (b � a)/(n + 1) We already have y 0 = u(a) = ↵ and yn+1 = u(b) = � from BC, and we seek approximate solution value yi ⇡ u(ti) at each interior mesh point ti, i = 1,... , n Michael T. Heath Scientific Computing 20 / 45
Boundary Value Problems Numerical Methods for BVPs Shooting Method Finite Difference Method Collocation Method Galerkin Method
We replace derivatives by finite difference approximations such as u 0 (ti) ⇡ yi+1 � yi� 1 2 h u 00 (ti) ⇡ yi+1 � 2 yi + yi� 1 h 2 This yields system of equations yi+1 � 2 yi + yi� 1 h 2 = f
ti, yi, yi+1 � yi� 1 2 h
to be solved for unknowns yi, i = 1,... , n System of equations may be linear or nonlinear, depending on whether f is linear or nonlinear Michael T. Heath Scientific Computing 21 / 45 Error is O(h^2 ) Error is O(h^2 )
Boundary Value Problems Numerical Methods for BVPs Shooting Method Finite Difference Method Collocation Method Galerkin Method
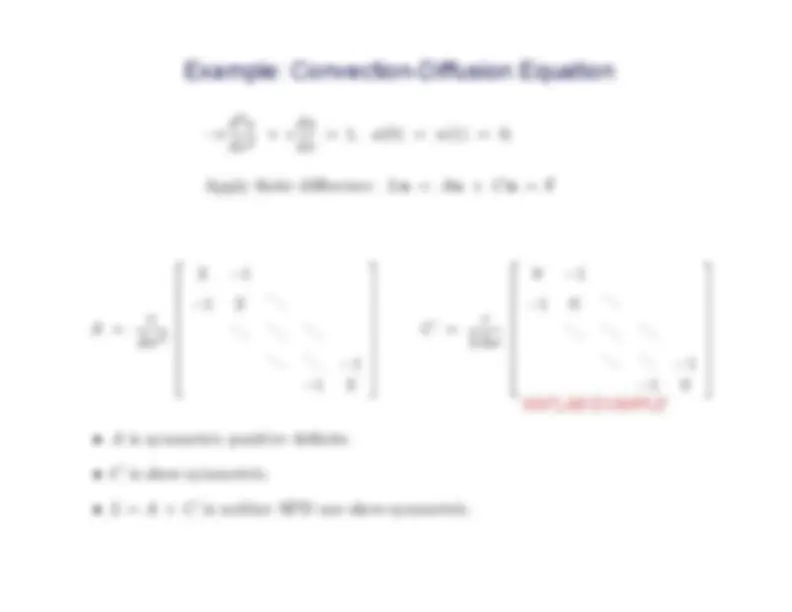
For these particular finite difference formulas, system to be solved is tridiagonal, which saves on both work and storage compared to general system of equations This is generally true of finite difference methods: they yield sparse systems because each equation involves few variables Michael T. Heath Scientific Computing 22 / 45
2 ||e|| 1 = max ⌦ |e| ⇡ max i |ei|
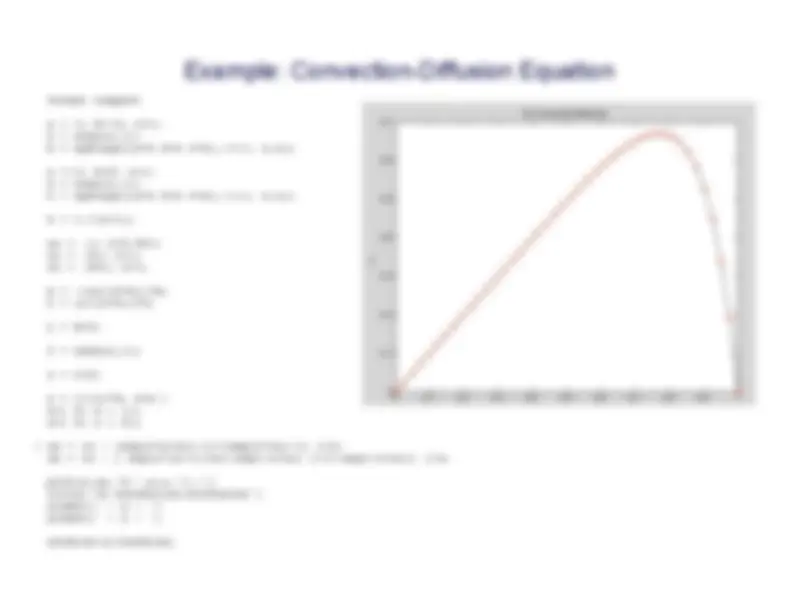
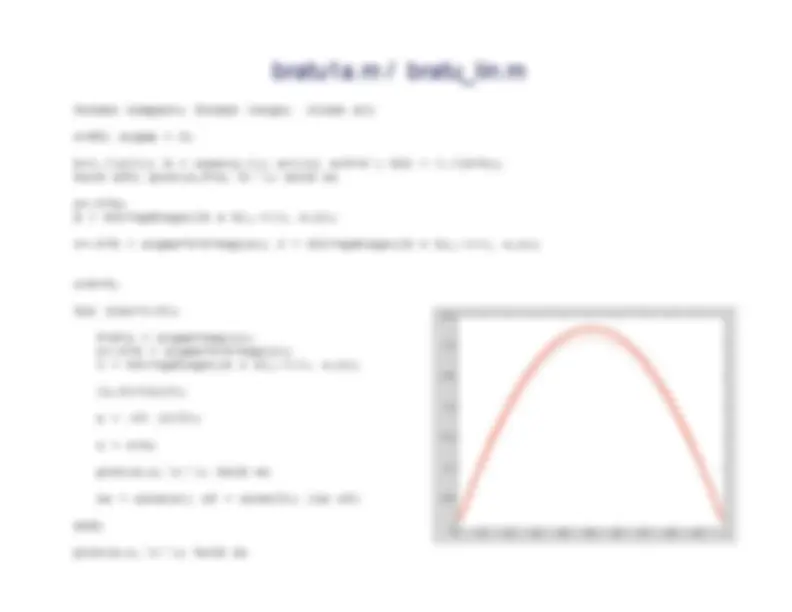
Nonlinear Example: The Bratu Equation
f k i = j= Aij u k j �^ �e ui �! (Jk) ij = i @uj = Aij � �e ui .
2
uj
2
2
uj