Download CHAPTER 3:KINEMATICS and more Cheat Sheet Dynamics in PDF only on Docsity!
Ch. 8: Kinetics of Particles
8.0 Outline 415
Introduction 416
Newton’s Second Law 417
Equations of Motion 418
Rectilinear Motion 421
Curvilinear Motion 444
8.0 Outline
Ch. 8: Kinetics of Particles
8.1 Introduction
8.1 Introduction
Kinetics is the study of the relations between the forces
and the motion. Here we will not seriously concern
whether the forces cause the motion or the motion
generates the forces (causality).
In this chapter, the focus is on the particles. That is the
body whose physical dimensions are so small compared
with the radius of curvature of its path.
There are at least 3 approaches toe the solution of
kinetic problems: (a) Newton’s second law (b) work and
energy method (c) impulse and momentum method.
Ch. 8: Kinetics of Particles
8.3 Equation of Motion and Solution of Problems
8.3 Equation of Motion and Solution
Two problems of dynamics
(1) specified kinematic conditions, find forces
straightforward application of Newton’s law as
algebraic equations
(2) specified forces, find motion
Difficulty depends on the form of force function
(t, s, v, a), as the solutions are found by solving
a system of differential equations.
For simple functions, we can find closed form solutions
of motion as in rectilinear motion (sec. 2.2).
m --- equation of motion
scalar components decomposition according to a specified coordinate
∑ F =^ a
Ch. 8: Kinetics of Particles
8.3 Equation of Motion and Solution
Unconstrained motion
Motion of the particle is determined by its initial motion and
the forces from external sources. It is free of constraints
and so has three degrees of freedom to specify
the position. Three scalar equations of motion would
have to be applied and integrated to obtain the motion.
Constrained motion
Motion of the particle is partially or totally determined by
restraining guides, other than its initial motion and the
forces from external sources. Therefore, all forces , both
applied and reactive, that act on the particle must be
accounted for in Newton’s law. The number of d.o.f. and
equations are reduced regarding to the type of constraints.
Ch. 8: Kinetics of Particles
8.4 Rectilinear Motion
x x y z
If the x-axis is the direction of the rectilinear motion,
F ma F 0 F 0
If we are not free to choose a coordinate direction along the motion,
the nonzero acceleration component will be sh
∑ =^ ∑ =^ ∑ =
x x y y z z
A B A
own up in all equations:
F ma F ma F ma
Other coordinate system such as n-t or r-
may be determined via the use of relative motion
For pure translating moving reference frame
θ
∑ =^ ∑ =^ ∑ =
a
a = a + a /B
Ch. 8: Kinetics of Particles
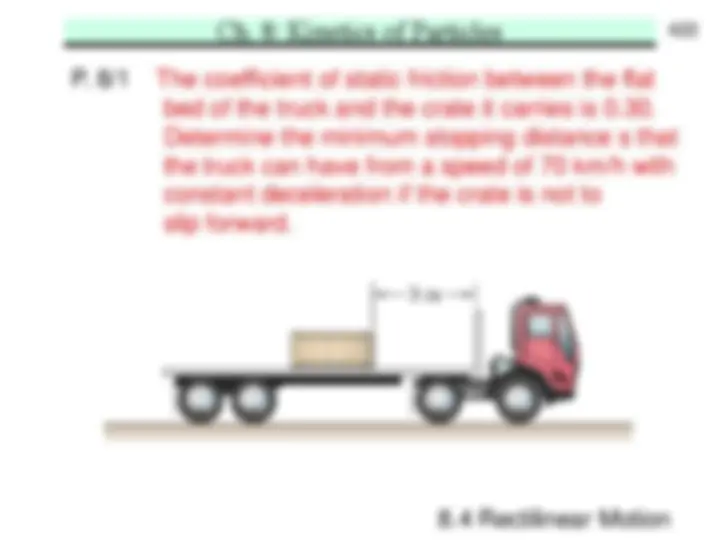
P. 8/1 The coefficient of static friction between the flat
bed of the truck and the crate it carries is 0.30.
Determine the minimum stopping distance s that
the truck can have from a speed of 70 km/h with
constant deceleration if the crate is not to
slip forward.
Ch. 8: Kinetics of Particles
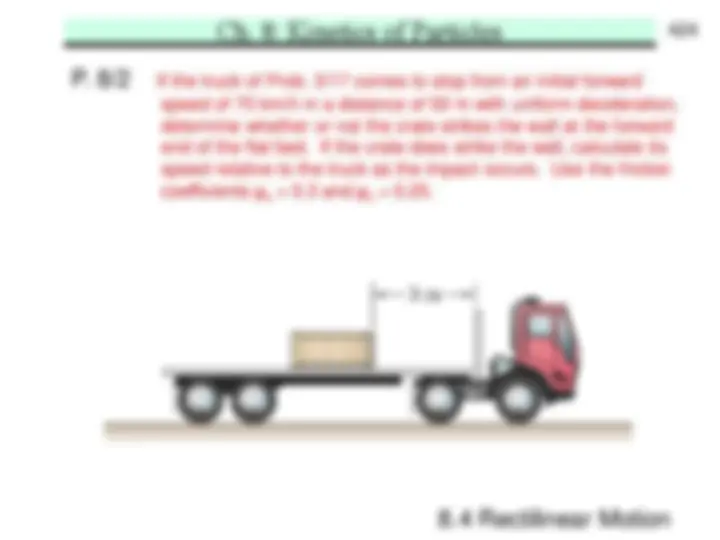
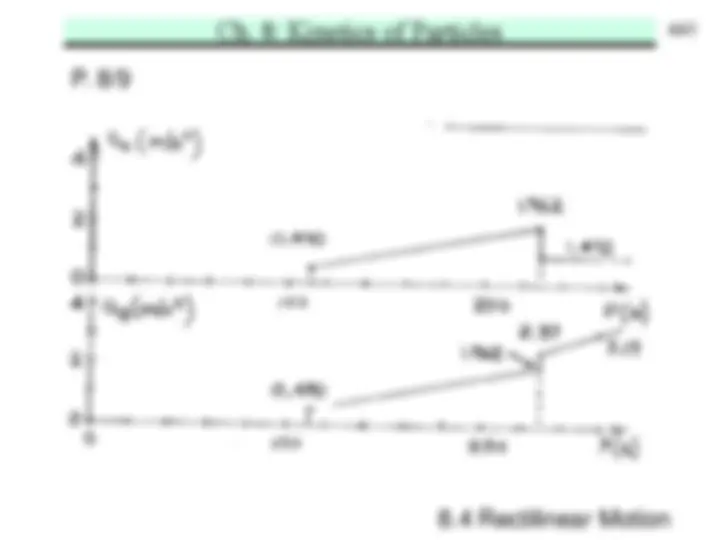
P. 8/2 If the truck of Prob. 3/17 comes to stop from an initial forward
speed of 70 km/h in a distance of 50 m with uniform deceleration, determine whether or not the crate strikes the wall at the forward end of the flat bed. If the crate does strike the wall, calculate its speed relative to the truck as the impact occurs. Use the friction coefficients μs = 0.3 and μk = 0.25.
Ch. 8: Kinetics of Particles
P. 8/
2 2 2 2 o o truck truck o o stop
stopping distance 50 m, which is less than minimum value 64.2 m the crate slips v v 2a s s 0 70 10 2a 50, a 3.781 m/s 36 v v a t t 0 70 10 3.781 t, t 5. 36
= ∴ = + − = ^ × + × = − = + − = ^ × − × =
s k truck crate x x s k k crate c
14 s
Friction force: F 0.3mg 2.943m and F 0.25mg 2.45m Assume crate and truck go together a a F ma F m 3.781 required friction 3.781m F the crate slips and F F F ma , a
= = = = → = = − = − → = > ∴ = − =
∑
[ ] ( )
( ) (^) ( )
rate^2 crate/truck crate truck crate/truck^2
o o o 2 2 o
2.45 m/s a a a a 2.45 3.781 1.331 m/s the crate slips forward but will it strike the wall? s s v t t 1 a t t relative motion calculation 2 3 1 1. 2
= − = − = − − − = ∴ (^) = + − + − = × ( )
(^2) strike stop o o crate/truck
t , t 2.123 s t crate will strike the wall before the truck stops v v a t t relative motion calculation v 0 1.331 2.123 2.826 m/s
× = < ∴ = + − = + × =
N
F < 0.3N
+x
Ch. 8: Kinetics of Particles
P. 8/
A max A
x x A A^2 B B^2
max x
(a) N 20g, F 0.5N 98.1 N 120 N block A moves forward relative to B F ma 120 98.1 20a , a 1.095 m/s 98.1 100a , a 0.981 m/s
(b) F 80 N block A does not move relative to B F
∑ x
2
max
ma A & B move together 80 120a, a 0.667 m/s Find developed friction by isolated FBD at A or B 80 F 20a, F 66.67 N F assumption is valid F 100a, F 66.67 N
2P
20g
100g
NB
NA NA
F
F
Ch. 8: Kinetics of Particles
P. 8/4 A simple pendulum is pivoted at O and is free to
swing in the vertical plane of the plate. If the
plate is given a constant acceleration a up the
incline θ, write an expression for the steady
angle β assumed by the pendulum after all
initial start-up oscillations have ceased. Neglect
the mass of the slender supporting rod.
Ch. 8: Kinetics of Particles
P. 8/5 For the friction coefficients μs = 0.25 and
μk = 0.20, calculate the acceleration of each
body and the tension T in the cable.
Ch. 8: Kinetics of Particles
P. 8/
A B A B max s max max
s 2s c a 2a 0
N 60gcos30, F N 127.4 N
Assume motion impends at block A F F and equilibrium
F 0 60gsin30 F T 0, T 166.9 N
but cylinder B will not be in equilibrium 20g 2T 0 move
l
k A B 2 2 B B A
up
Assum block A slides down and block B moves up
F ma 60gsin30 F T 60a 120a
20g 2T 20a , T 105.35 N, a 0.725 m/s , a 1.45 m/s
T
2T
20g
60g
F N
Ch. 8: Kinetics of Particles
P. 8/
y 1 x x
x x
From the given statements, pendulum and cart have same acceleration
At the pendulum,
F 0 Tcos mg 0, T mg/cos
F ma Tsin ma, tan a
g
At the cart,
F ma P Tsin Ma, P
θ θ
θ θ
θ
−
= = = ^
^
∑ =^ (^ m^ +M gtan)^ θ
x
y
mg
Mg
T
θ^ T
P
N
Ch. 8: Kinetics of Particles
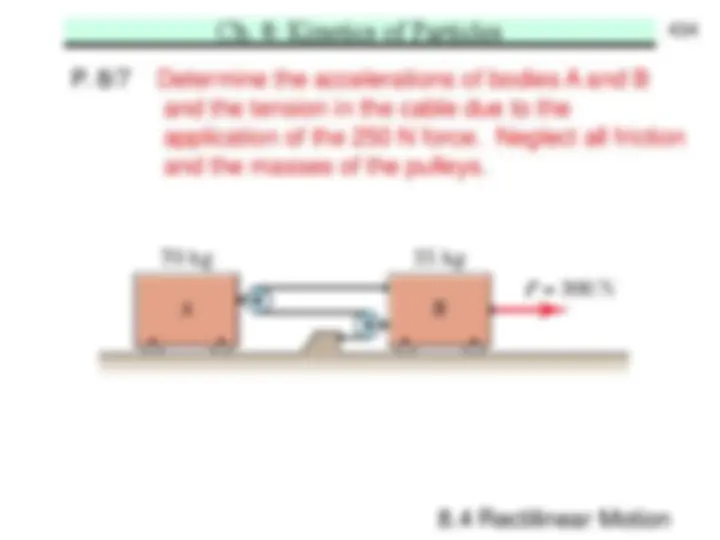
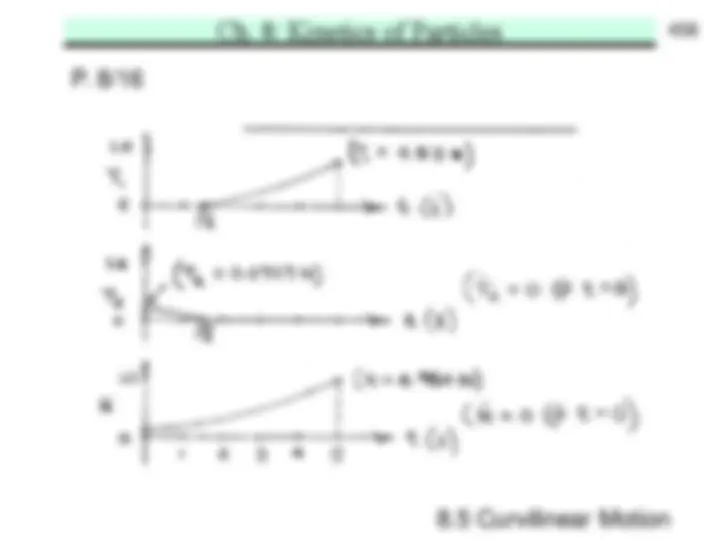
P. 8/7 Determine the accelerations of bodies A and B
and the tension in the cable due to the
application of the 250 N force. Neglect all friction
and the masses of the pulleys.