Download Closed Loop Transfer Function - Principles of Vibration Control - Lecture Notes and more Study notes Mechanics of Materials in PDF only on Docsity!
Module 5: Principles of Active Vibration Control
Lecture 23: Feedback and Feed-forward AVC for SISO Systems
The Lecture Contains:
Closed Loop Transfer Function of a SDOF System
Nature of Controller - PD, PI and PID Controller
Numerical Studies for a SISO System
Basics of Classical Control
Feed-forward Control
Module 5: Principles of Active Vibration Control
Lecture 23: Feedback and Feed-forward AVC for SISO Systems
Feedback Control of a SISO System
The figure below shows symbolic representation of a single input single output (SISO) vibration system. Many closed loop control system could be modelled in this form. A typical application of such control system is in the field of engine vibration control. The figure below illustrates such a system. The disturbance force generated at the engine is transmitted to the vehicle through engine mounts. The vibration is sensed by a single accelerometer ( single output), passed to the controller which produces a negative of the output signal (ref, is usually zero in vibration problem). The control signal is amplified through a power amplifier and fed to the actuator. The actuator force is of such a magnitude and direction that it cancels the effect of vibration.
Figure 23.1: Closed loop control of a SISO system
The input-output relationship of a dynamic system is represented as a black-box consisting of frequency domain description of the system transfer function.
Module 5: Principles of Active Vibration Control
Lecture 23: Feedback and Feed-forward AVC for SISO Systems
A Simple Numerical Simulation
Consider a SDOF system subjected to unit step input. Due to flexibility in the system, some part
of the energy induces vibration in the system. A PID controller with K =1.5, K D = 0.1 and K I =
0.5 is used to control the vibration. Find out the response of the system with and without closed-loop control. The following are the system parameters; m=0.2, c=0.001, k=0.5, H=1 (assume unity feedback).
Sample Solution
The open loop transfer function of the system is given by:
The closed loop transfer function of the system is given by:
Module 5: Principles of Active Vibration Control
Lecture 23: Feedback and Feed-forward AVC for SISO Systems
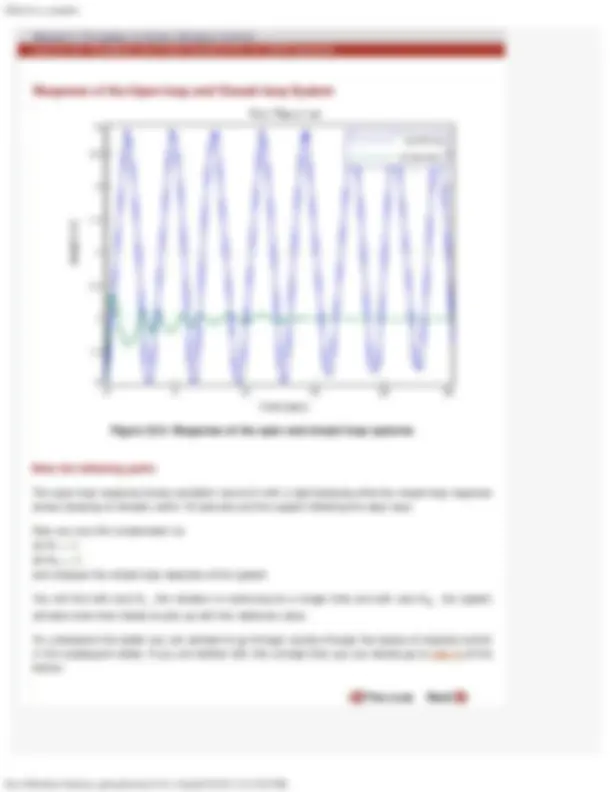
Response of the Open-loop and Closed-loop System
Figure 23.3: Response of the open and closed loop systems
Note the following point:
The open-loop response shows oscillation around 2 with a light damping while the closed-loop response shows damping of vibration within 10 seconds and the system following the step input.
Now you vary the compensator as (a) (b) and compare the closed loop response of the system
You will find with zero K (^) I , the vibration is continuing for a longer time and with zero K (^) D , the system will take more time initially to pick up with the reference value.
To understand this better you are advised to go through quickly through the basics of classical control in the subsequent slides. If you are familiar with this concept then you can directly go to slide 9 of this lecture.
Denoting the right hand side of the above equation as , one can express the ratio of frequency-
domain response X(s) and as
T(s) is also known as transfer function of the system.
In a block diagram form, this can be represented as
The response of a system in time domain could be obtained by carrying out Inverse Laplace Transformation of the transfer function. The inverse Laplace Transform is written as
However, this relationship is seldom used. If F(s) is rational, one commonly uses the method of partial fraction expansion. Consider a rational function F(s) expressed as:
Factoring the numerator and denominator polynomials one can also write
Corresponding to the numerator polynomial, z i s are referred as the^ zeros^ of the transfer function while
the roots of the numerator polynomial p i 's are known as the poles of the transfer function.
Now, the transfer function F(s) may be expressed as
where,
Finally, the response of the system may be expressed as
Figure 23.4: Time response of a second order system
There are four major specifications that define the response of a second order system.
The swiftness of the response is measured by the rise time (T (^) r ), which is defined as the time required reaching 90% of the reference input.
The closeness of the response signal to the reference is measured in terms of % overshoot ( PO ) such that
PO = ((M (^) p – final value)/final value)*
The time taken to reach the maximum response is denoted by Peak Time (T (^) p ). The % overshoot is
measured at the same location. Finally, the Settling Time (T (^) s ) is defined as the time required for the
system to settle within a certain percentage of the reference input (±d ).
For a second order system, the above four specifications could be defined in terms of natural frequency and damping factor of the system as:
Module 5: Principles of Active Vibration Control
Lecture 23: Feedback and Feed-forward AVC for SISO Systems
The Root Locus method
The root locus method is used to study the change in the pole-location of a closed-loop system in the s-plane with respect to the change in the control-gain. A simple closed loop system is described as follows:
Figure 23.5: A simple closed loop system
Following the block-diagram, the error E(s) is
E(s) = R(s) – H(s) C(s) (23.9)
Again
C(s) = K G(s) E(s) = K G(s) [R(s) – H(s) C(s)] (23.10)
Hence,
C(s)/R(s) = K G(s) /[1+K G(s) H(s)] (23.11)
Equation (24.11) is known as the closed-loop transfer function for a negative feed-back system. The characteristic equation corresponding to a unity feedback (H(s) =1) for the above system could be written as
1 + K G(s) = 0 (23.12)
The above equation could be expressed in terms of magnitude and phase as follows:
Using the phase relationship of the above equation, one can plot the locus of the roots of the characteristic equation as K varies from 0 to infinity.
Module 5: Principles of Active Vibration Control
Lecture 23: Feedback and Feed-forward AVC for SISO Systems
Feed Forward Control
Figure 23.9: Feed forward control
On Feed-forward Control
Due to disturbance in the process, the input X(s) to an actuator may generate an output X(s) D(s) which may destabilize the system. In such cases if the input X(s) is passed through a feed-forward compensator C (^) FF (s), and compared with the output X(s)D(s) then with correct estimation of D(s) one may alleviate the effect of the disturbance on the plant G(s). The response of the plant may be sensed by monitoring the signal C(s)H(s). However, such responses are used only to monitor the performance of the filter and not fed back in the loop. It has been shown by Hansen et al ([11-3]) that optimal gain of the filter C (^) FF (s) is C (^) FF (s) = - S (^) FF -1 S (^) DF , Where, S (^) FF denotes the power spectral density of the ref signal X(s) and S (^) DF is the cross spectral density between the disturbance and the filter output.
Module 5: Principles of Active Vibration Control
Lecture 23: Feedback and Feed-forward AVC for SISO Systems
Important Observations on Feed-forward Control
For an efficient filter, the system should remain stationary. Any unknown delay in the system could destabilize the performance. Since a successful filter has to match the gain and phase contributions by the disturbance signal at all the frequencies present in the signal, the disturbance should be free from near-field noises, which are difficult to estimate. For a system having random disturbance one may attempt to develop a similar feed-forward compensator – however, such a system would be non-causal in nature, hence a purely feed- forward system should be substituted by a combination of feed-forward and feed-back system.
Summary of the Lecture
The simplest of the SISO system based on Classical Control is discussed. A typical SDOF system and it's SISO representation is considered.. A quick recapitulation of the classical control system is discussed. Finally, the case of Feed-forward control and its impact is discussed.