



Luis Anchordoqui
Conservation Theorems: Angular Momentum






Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An in-depth exploration of angular momentum and torque, two fundamental concepts in classical mechanics. The author, Luis Anchordoqui, explains the mathematical representation of torque as a vector product of position and force, and how it relates to angular momentum. The document also covers the significance of the right-hand rule and the direction of the vector product. Additionally, the document discusses the conservation of angular momentum and its implications for various physical systems, including figure skaters and neutron stars.
Typology: Study notes
1 / 20

This page cannot be seen from the preview
Don't miss anything!
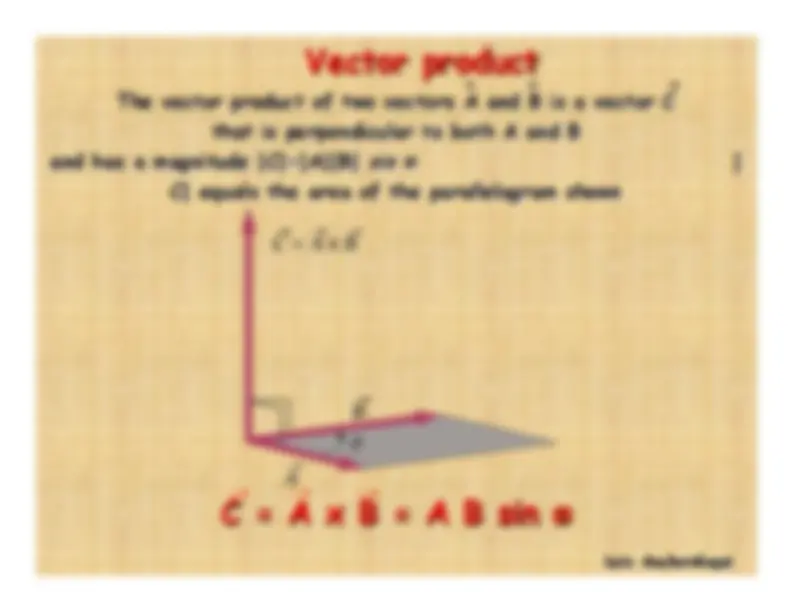
The torque is expressed mathematically as a vector product of r and F
If F and r are both perpendicular to the z axis
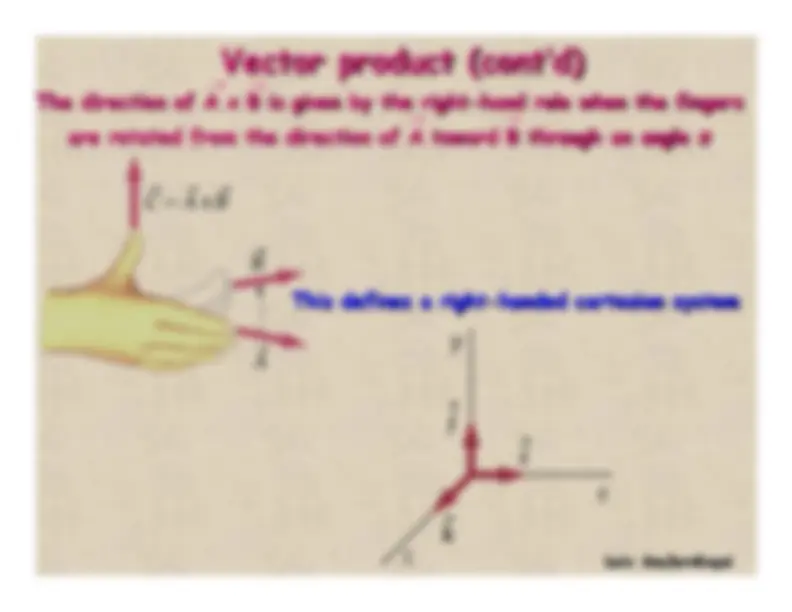
The direction of A x B is given by the right-hand rule when the fingers
This defines a right-handed cartesian system
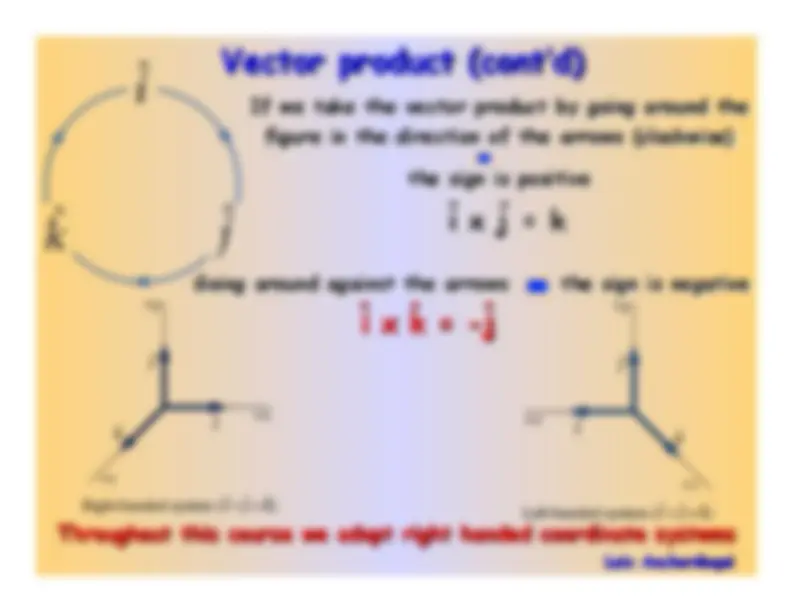
If we take the vector product by going around the figure in the direction of the arrows (clockwise) the sign is positive
Going around against the arrows the sign is negative
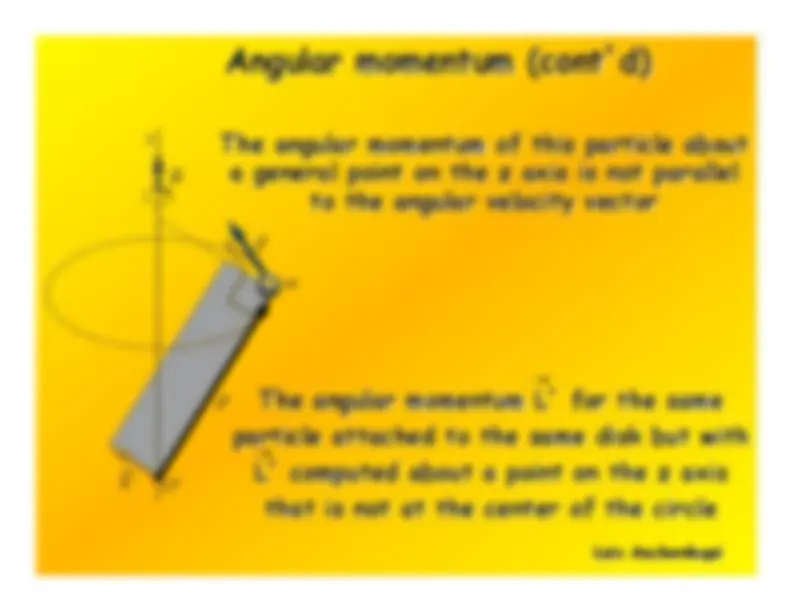
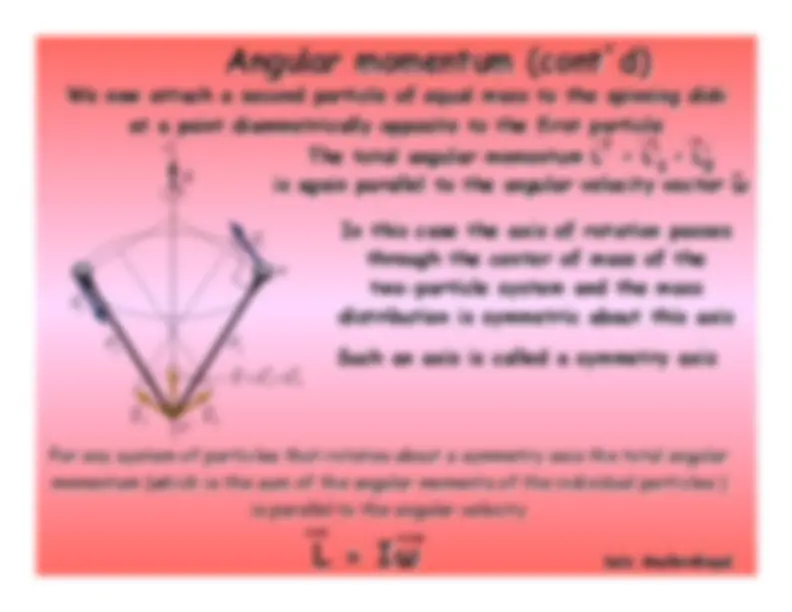
The figure shows a particle of mass m attached to a circular disk of negligible mass moving in a circle in the xy plane with its center at the origin The disk is spinning about the z-axis with angular speed ω
The angular momentum is in the same direction as the angular velocity vector. Because mr ² is the moment of inertia for a single particle we have
If the net external torque acting on a system about some point is zero, the total angular momentum of the system about that point remains constant. ☛ The angular momentum of a particle (with respect to an origin from which the position vector r is measured ) is
☛ The torque (or moment of force) with respect to the same origin is
Position vector from the origin to the point where the force is applied
d dt But of course r x p = r x mv = m ( r x r ) = 0
A figure skater can increase his spin rotation rate from an initial rate of 1 rev every 2 s to a final rate of 3 rev/s. If his initial moment of inertia was 4.6 kg m ² what is his final moment of inertia? How does he physically accomplish this change?
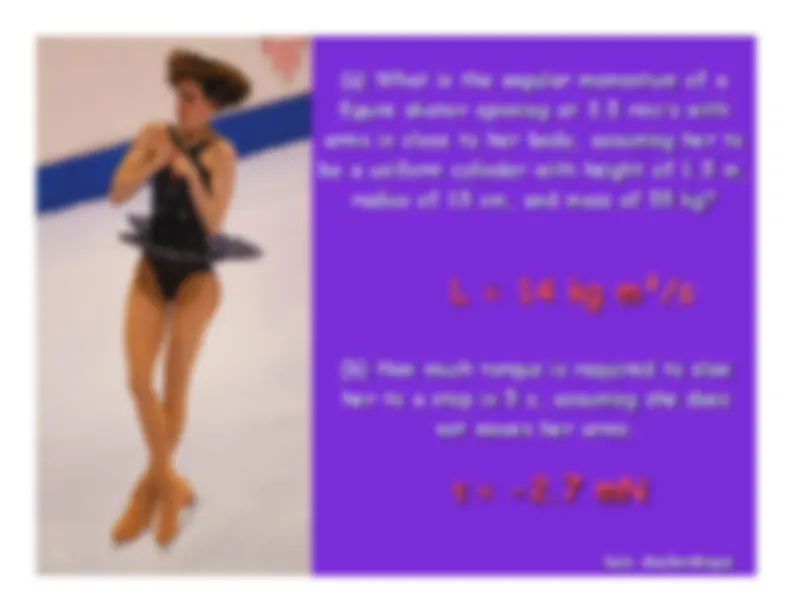
(a) What is the angular momentum of a figure skater spinning at 3.5 rev/s with arms in close to her body, assuming her to be a uniform cylinder with height of 1.5 m, radius of 15 cm, and mass of 55 kg? (b) How much torque is required to slow her to a stop in 5 s, assuming she does not moves her arms.
Jerry running away from Tom jumps on the outside edge of a freely turning ceiling fan of moment of inertia I and radius R. If m is the mass of Jerry, by what ratio does the angular velocity change?
Newton’s second law for angular motion The net external torque about a fixed point acting on a system equals the rate of change of the angular momentum of the system about the same point
net, ext
sys
Angular impulse
sys net, ext It is often useful to split the total angular momentum of a system about an arbitrary point O into orbital angular momentum and spin angular momentum
orbit spin sys
Angular Momentum of a System of Particles Newton’s second law for angular motion (cont’d) Earth has spin angular momentum due to its spinning motion about its rotational axis and it has orbital angular momentum about the center of the Sun due to its orbital motion around the Sun Assuming the Earth is a uniform sphere L = I ω = M R ² ω = 7.1 x 10 kg m ² /s
spin dally^ dally
L = rcm x M v = M r ² ω = 2.7 x 10 kg m ² /s cm cm orbit yearly
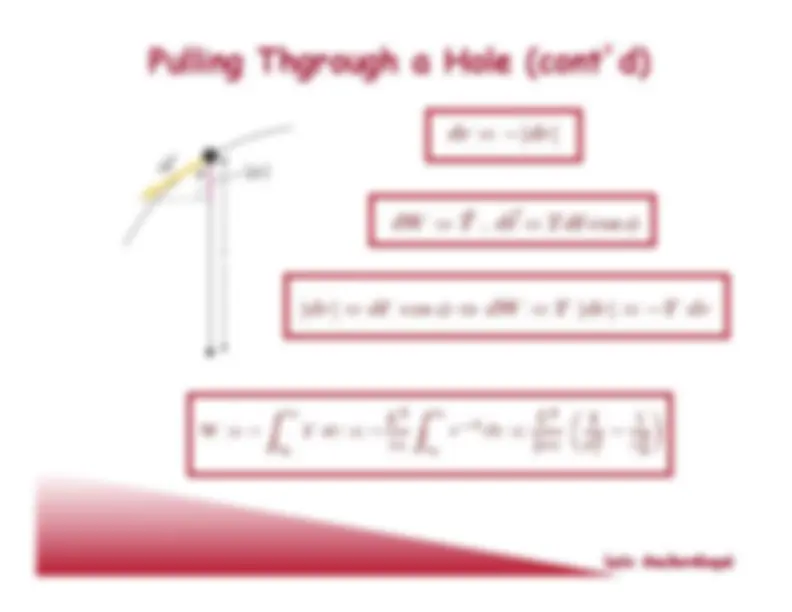
Because the particle is being pulled in slowly yhe acceleration is virtually the same as if the particle were moving in a circle