Download Control systems lecture 01 04 and more Lecture notes Control Systems Analysis in PDF only on Docsity!
CONTROL SYSTEMS
MEC 2825
Dr. Mohammad Abdelrahman Semester I 2014/
Control Systems MEC 3825
Three Credit Hrs – Core Course Assessment: Midterm 30% - Assignments and Quizzes 20% - Projects 10% - Final Examination 40%. Venue: E2-1- Time: 11:30 -12:50 pm T-TH
- Lecture: Dr. Mohammad Abdelrahman
- Room: E1-2-16.
- Contacts: Email: [email protected] Office: 03-6196- H/P: 017-240-
- Consultation Hrs: 2-3 pm M/W
Course Overview
- Introduction; Modeling in Frequency Domain, Modeling in Time Domain, Time Response, Reduction of Multiple Systems, Stability, Steady State Errors, Root Locus Technique, Design via Root Locus.
Chapter One
Introduction
- Learning Outcomes
- Define a control system and describe some applications
- Describe historical developments leading to modern day control theory
- Describe the basic features and configurations of control systems
- Describe control systems analysis and design objectives
- Describe a control system's design process
- Describe the benefit from studying control systems
- Case Study Learning Outcomes
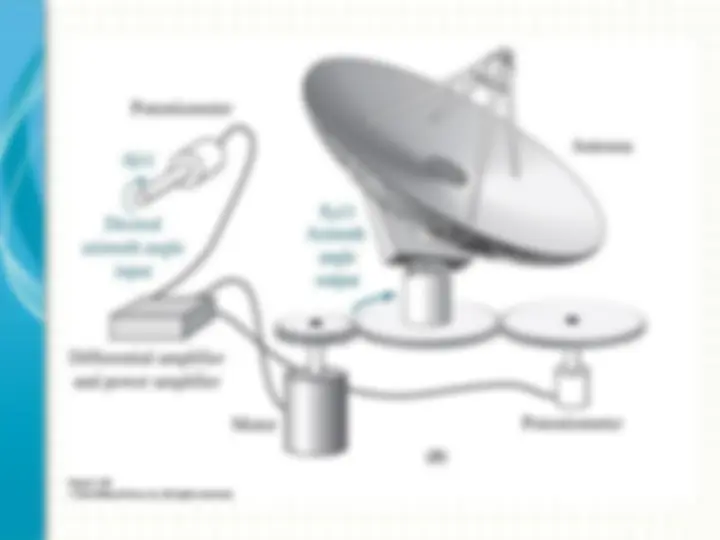
- An antenna azimuth position control system
Advantages of Control Systems
- We build control systems for four primary reasons:
- Power amplification
- Remote control
- Convenience of input form
- Compensation for disturbances For example, a radar antenna, positioned by the low- power rotation of a knob at the input, requires a large amount of power for its output rotation. A control system can produce the needed power amplification, or power gain.
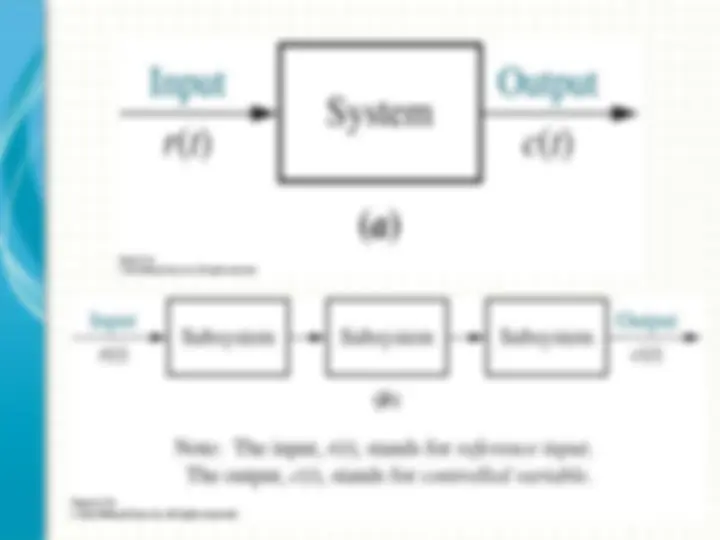
System Configurations
- Open-Loop Systems
- A generic open-loop system is shown in It starts with a subsystem called an input transducer, which converts the form of the input to that used by the controller.
- Closed-Loop (Feedback Control) Systems
- The disadvantages of open-loop systems, namely sensitivity to disturbances and inability to correct for these disturbances, may be overcome in closed-loop systems
Analysis and Design Objectives
- Analysis is the process by which a system's performance is determined. For example, we evaluate its transient response and steady-state error to determine if they meet the desired specifications.
- Design is the process by which a system's performance is created or changed. For example, if a system's transient response and steady-state error are analyzed and found not to meet the specifications, then we change parameters or add additional components to meet the specifications.
- Transient Response
- Steady-State Response
- Stability
Total response = Natural response + Forced response