Download Contrôle Systems engineering by nise solution and more Study notes Engineering in PDF only on Docsity!
O N E
Introduction
ANSWERS TO REVIEW QUESTIONS
1. Guided missiles, automatic gain control in radio receivers, satellite tracking antenna 2. Yes - power gain, remote control, parameter conversion; No - Expense, complexity 3. Motor, low pass filter, inertia supported between two bearings 4. Closed-loop systems compensate for disturbances by measuring the response, comparing it to the input response (the desired output), and then correcting the output response. 5. Under the condition that the feedback element is other than unity 6. Actuating signal 7. Multiple subsystems can time share the controller. Any adjustments to the controller can be implemented with simply software changes. 8. Stability, transient response, and steady-state error 9. Steady-state, transient 10. It follows a growing transient response until the steady-state response is no longer visible. The system will either destroy itself, reach an equilibrium state because of saturation in driving amplifiers, or hit limit stops. 11. Transient response 12. True 13. Transfer function, state-space, differential equations 14. Transfer function - the Laplace transform of the differential equation State-space - representation of an nth order differential equation as n simultaneous first-order differential equations Differential equation - Modeling a system with its differential equation
SOLUTIONS TO PROBLEMS
1. Five turns yields 50 v. Therefore K = 50 volts
5 x 2 π rad
= 1.
2 Chapter 1: Introduction
2.
Thermostat Amplifier andvalves Heater
Temperature difference
Voltage difference Fuelflow temperatureActual
Desired temperature
3.
Desired roll angle
Input voltage
Pilot controls
Aileron position control
Error voltage
Aileron position Aircraft dynamics
Roll rate Integrate
Roll angle
Gyro voltage Gyro
4. Speed Error voltage
Desired speed
Input voltage
transducer (^) Amplifier
Motor and drive system
Actual speed
Voltage proportional to actual speed
Dancer position sensor
Dancer dynamics
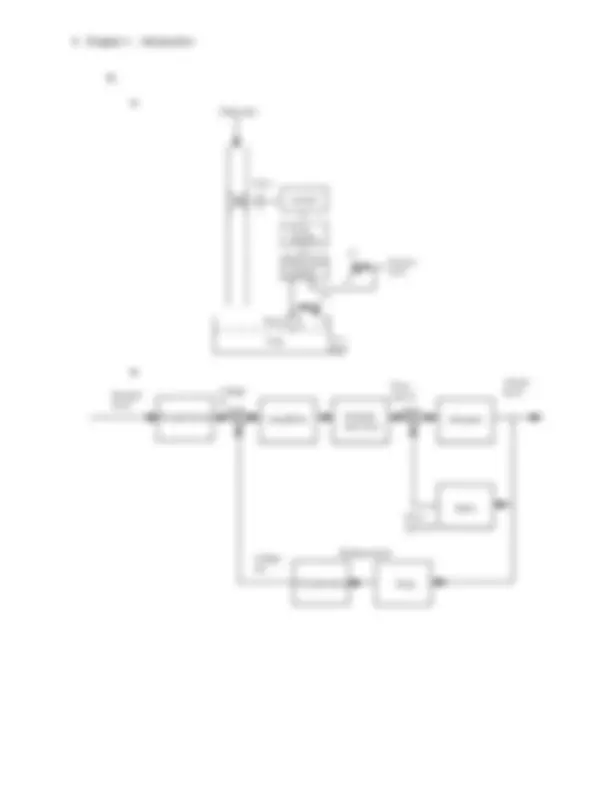
5.
Desired power
Power Error voltage
Input voltage
Transducer Amplifier
Motor and drive system
Voltage proportional to actual power
Rod position
Reactor
Actual power
Sensor & transducer
4 Chapter 1: Introduction
8. a.
R
+V -V
Differential amplifier
Desired level
Power amplifier
Actuator
Valve
Float
Fluid input
Tank Drain
R
+V
-V
b. Desired level Amplifiers Actuatorand valve
Flow rate in Integrate
Actual level
Flow rate out
Potentiometer +
Drain
Potentiometer Float
voltage in
voltage out
Displacement
Solutions to Problems 5
9.
Desiredforce Transducer (^) Amplifier Valve Actuatorand load Tire
Load cell
Current Displacement Displacement
10.
Commanded blood pressure Vaporizer Patient
Actual blood
Isoflurane concentration
11.
Controller & motor
Grinder
Force Feed rate Integrator
Desired depth (^) Depth
12.
circuit^ Coil Solenoid coil & actuator
Coil current Force^ Armature& spool dynamics
Desired position (^) Transducer Depth
Coilvoltage
LVDT
13. a. L di dt
Solutions to Problems 7
i = 292 29 e - t^ sin 29 t
c. i
t
15. a. Assume a particular solution of
Substitute into the differential equation and obtain
Equating like coefficients,
From which, C =^3553 and D =^1053.
The characteristic polynomial is
Thus, the total solution is
Solving for the arbitrary constants, x(0) = A +^3553 = 0. Therefore, A = -^3553. The final solution is
b. Assume a particular solution of xp = Asin3t + Bcos3t
8 Chapter 1: Introduction
Substitute into the differential equation and obtain (18A − B)cos(3t) − (A + 18B)sin(3t) = 5sin(3t)
Therefore, 18A – B = 0 and –(A + 18B) = 5. Solving for A and B we obtain xp = (-1/65)sin3t + (-18/65)cos3t The characteristic polynomial is M 2 + 6 M + 8 = M + 4 M + 2
Thus, the total solution is x = C e - 4 t^ + D e - 2 t^ + -^1865 cos 3 t - 651 sin 3 t
Solving for the arbitrary constants, x (0) = C + D − 18 65
Also, the derivative of the solution is
dxdt = - 653 cos 3 t +^5465 sin 3 t - 4 C e - 4 t (^) - 2 D e - 2 t
Solving for the arbitrary constants, x
. (0) − 3 65
− 4 C − 2 D = 0 , or C = − 3 10
and D = 15 26
.
The final solution is x = -^1865 cos 3 t - 651 sin 3 t - 103 e - 4 t^ +^1526 e - 2 t
c. Assume a particular solution of xp = A Substitute into the differential equation and obtain 25A = 10, or A = 2/5. The characteristic polynomial is M 2 + 8 M + 25 = M + 4 + 3 i M + 4 - 3 i
Thus, the total solution is x =^25 + e - 4 t^ B sin 3 t + C cos 3 t
Solving for the arbitrary constants, x(0) = C + 2/5 = 0. Therefore, C = -2/5. Also, the derivative of the solution is dxdt = 3 B -4 C cos 3 t - 4 B + 3 C sin 3 t e - 4 t
10 Chapter 1: Introduction
Equating like coefficients, C = 5, D = 1, and 2D + E = 0. From which, C = 5, D = 1, and E = - 2. The characteristic polynomial is
Thus, the total solution is
Solving for the arbitrary constants, x(0) = A + 5 - 2 = 2 Therefore, A = -1. Also, the derivative of the solution is dx dt
= (− A + B ) e −^ t^ − Bte − t^ − 10 e −^2 t^ + 1
Solving for the arbitrary constants, x
. (0) = B - 8 = 1. Therefore, B = 9. The final solution is
c. Assume a particular solution of x (^) p = Ct^2 + Dt + E
Substitute into the differential equation and obtain
Equating like coefficients, C =^14 , D = 0, and 2C + 4E = 0. From which, C =^14 , D = 0, and E = -^18.
The characteristic polynomial is
Thus, the total solution is
Solving for the arbitrary constants, x(0) = A -^18 = 1 Therefore, A =^98. Also, the derivative of the
solution is dx dt
Solving for the arbitrary constants, x
. (0) = 2B = 2. Therefore, B = 1. The final solution is
Solutions to Problems 11
17.
Input transducer
Desired force Inputvoltage Controller Actuator Pantographdynamics Spring
Fup
Spring displacement Fout
Sensor