



Linear Control Systems
Lecture # 11
Controller and Observer Forms
– p. 1/28


















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Controller and Observer Forms, Matlab Calculations, Controllers forms Properties, Connection with Transfer Functions, Single-input Case, Observer Form, Single-Output Case
Typology: Study notes
1 / 28

This page cannot be seen from the preview
Don't miss anything!
x
Ax
Bu
) is controllable
is
n
n,
is
n
m,
m >
has full rank
n
b
1
, b
2
,... , b
m
b
1
,... , b
m
, Ab
1
, Ab
m
n
−
1
b
1
n
−
1
b
m
n
j
,... , m
μ
j
μ
j
b
j
μ
1
μ
m
n
n
n
b
1
, Ab
1
μ
1
−
1
b
1
,... , b
m
, Ab
m
μ
m
−
1
b
m
−
1
1
μ
1
μ
1
μ
1
μ
2
μ
1
···
μ
m
−
1
n
μ
1
μ
1
μ
1
μ
1
−
1
n
n
n
μ
m
−
1
c
c
c
c
c
c
m
c
c
m
c
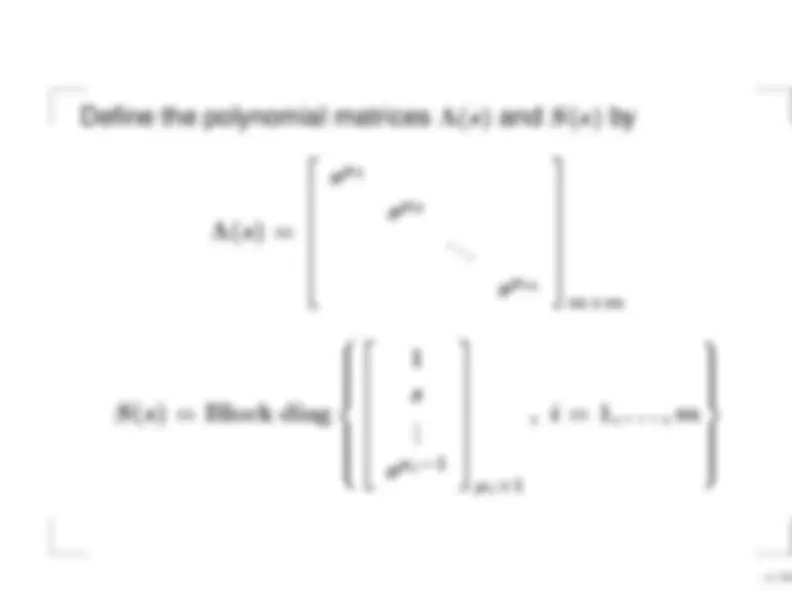
= Block diag
μ
i
×
μ
i
, i
,... , m
c
= Block diag
μ
i
×
1
, i
,... , m
μ
1
, μ
2
, μ
3
2
2
c
c
rank [
sI
c
c
n
m
m
n,
s
rank [
sI
c
c
n,
s
because
n
m
m
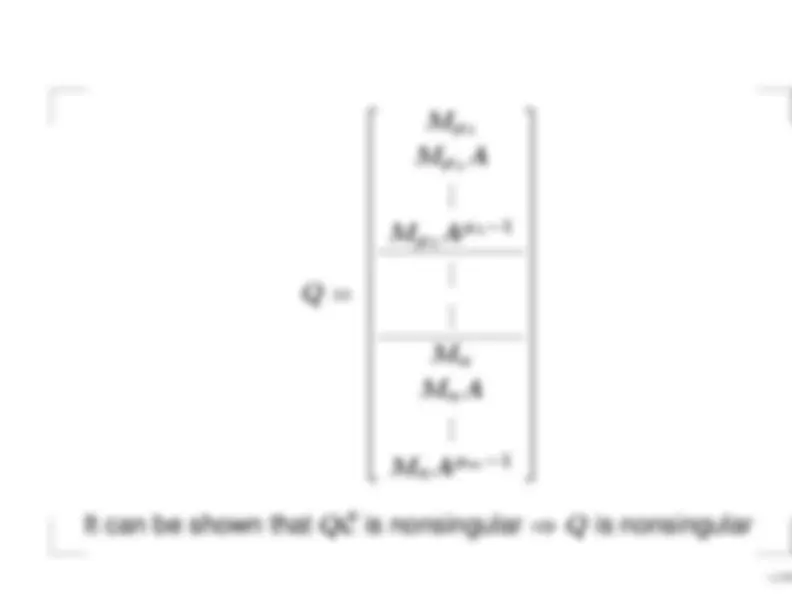
is nonsingular
c
c
) is controllable
c
c
c
c
c
c
rank
r < m
m
m
1
1
n
r
rank
1
r
Bu
−
1
u
1
u
1
u
2
1
u
1
r
u
1
s
s
s
s
μ
1
s
μ
2
s
μ
m
m
×
m
s
) = Block diag
s
μ
i
−
1
μ
i
×
1
, i
,... , m
sI
c
s
c
s
s
s
s
−
1
m
s
m
s
s
c
s
c
s
s
m
m
s
p
m
det(
s
n
Claim :
sI
c
s
c
s
sI
c
c
m
s
c
s
c
m
s
c
m
−
1
m
s
m
s
c
s
m
s
Corollary :
sI
c
−
1
c
s
−
1
s