Download Design of State Variable Feedback Systems: Observer-Controller and Optimal Control - Prof. and more Study notes Electrical and Electronics Engineering in PDF only on Docsity!
Chapter 11 Lecture 4
The Design of State Variable Feedback Systems
Observer-Controller Design
Combining the observer with a controller …
s
x &ˆ^1 x ˆ^ C
A
B
u y ˆ
K
r
x & = A ⋅ x + B ⋅ u C
y
L
y ~
Matrix Descriptions
r
B
e
x
A L C
A B K B K
e
x ⎥⋅ ⎦
&^00
y = C ⋅ x
The fundamental or state transition matrix and characteristic equation:
( ) [ ]
( )
( )
1 1
0
− − ⎥ ⎦
s A L C
s A B K B K s sI A t
Δ ( ) s =det{(^ A − B ⋅ K )}^ ⋅det{( A − L ⋅ C )}
Matrix System Design Procedure:
- Determine K to form LHP poles and place those poles in the desired locations.
det [ λ^ I − (^ A − B ⋅ K )]^ =Δ( s ) = 0
- Determine L to form LHP poles for the observer equation and place the poles where desired
for error convergence (converges faster than feedback to initial conditions)
det ( λ ⋅ I − ( A − L ⋅ C )) =Δ( s ) = 0
- Construct the observer-based control system using K and L.
u =− K ⋅ x
The Reference Input
The tracking of a reference input and the concept of a tracking error has been important in the
previous designs. Due to the input location of the “reference” shown to this point, it is no longer
in a location that can be easily used to describe it in a similar way.
s
x 1 &ˆ x ˆ C
A
B
u y ˆ
K
r
x & = A ⋅ x + B ⋅ u C
y
L
y ~
To manufacture a way to involve r as shown, we will introduce it in a modified diagram with
separate scaling for plant and the observer.
Picking values of M and N
Let N=0 and M=-L
x & = ( A − B ⋅ K ) ⋅ x + B ⋅ K ⋅ e
x ˆ& = ( A − B ⋅ K − L ⋅ C ) ⋅ x ˆ+ L ⋅( y − r )
e & = ( A − L ⋅ C ) ⋅ e + L ⋅ r
y = C ⋅ x
This is a desired result, where we see that the observer is driven by the difference between the
output and the desired reference! The block diagram is
For a scalar output system, this is simply a single-input, multiple-output compensator as shown.
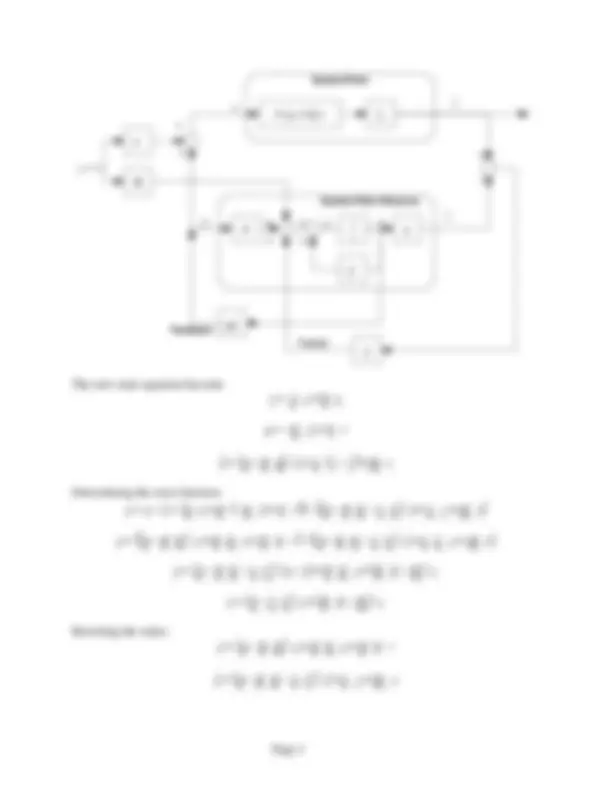
Using Dr. Bazuin’s figures, the new block diagram is:
s
System/Plant Observer
Feedback
x &ˆ^ x ˆ^ C
A
B
u
y ˆ
− K
r
x & = A ⋅ x + B ⋅ u C
System/Plant
y
_
L
Y-error
u
L
_
_
Repeating the state space equations:
x & = ( A − B ⋅ K ) ⋅ x + B ⋅ K ⋅ e
y = C ⋅ x
x ˆ& = ( A − B ⋅ K − L ⋅ C ) ⋅ x ˆ+ L ⋅( y − r )
e & = ( A − L ⋅ C ) ⋅ e + L ⋅ r
To optimize the function, we will focus on the time derivative of the weighted vector elements
For this case, P W W
T = ⋅ is a symmetric matrix (with same values above and below the
diagonal).
[ x ( ) t P x ( ) t ] x ( ) t P x ( ) t x ( ) t P x ( ) t
dt
d (^) T T T ⋅ ⋅ =& ⋅ ⋅ + ⋅ ⋅&
Substituting in for simple feedback control
[ x P x ] x ( ) t ( A B K ) P x ( ) t x ( ) t P ( A B K ) x ( ) t
dt
d (^) T T T T ⋅ ⋅ = ⋅ − ⋅ ⋅ ⋅ + ⋅ ⋅ − ⋅ ⋅
To simplify, we will use H = A − B ⋅ K
[ x P x ] x ( ) t H P x ( ) t x ( ) t P H x ( ) t x ( ) t ( H P P H ) x ( ) t
dt
d (^) T T T T T T ⋅ ⋅ = ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ = ⋅ ⋅ + ⋅ ⋅
If we require that the new “surrounded” matrix be the identity matrix, but negative, we can
derive the following condition and result
[ x P x ] x ( ) t ( H P P H ) x ( ) t x ( ) t I x ( ) t x ( ) t x ( ) t
dt
d (^) T T T T T ⋅ ⋅ = ⋅ ⋅ + ⋅ ⋅ =− ⋅ ⋅ =− ⋅
for I ( H P P H )
T =− ⋅ + ⋅
As a result
[ ] ( ) ( )
x ⋅ P ⋅ x ⋅ dt =− xt ⋅ xt ⋅ dt dt
d (^) T T
resulting in
x ⋅ P ⋅ x =− x t ⋅ x t ⋅ dt
T
t
t
T final
init
Using these values and returning the error function,
∫ ( )^ ( )
T
t
T J xt xt dt 0
Using the above results
∞ ∞
=
= (^) ∫ ⋅ ⋅ =− ⋅ ⋅ (^0 )
J xt xt dt x P x
T t
T
Assuming a stable system, so that the states approach zero at t=infinity,
J x ( ) P x ( ) x ( ) 0 P x ( ) 0 x ( ) 0 P x ( ) 0
T T T =− ∞ ⋅ ⋅ ∞+ ⋅ ⋅ = ⋅ ⋅
The cost is related to the initial conditions and the “minimized” matrix P
for I H P P H
T − = ⋅ + ⋅
or I ( A B K ) P P ( A B K )
T − = − ⋅ ⋅ + ⋅ − ⋅
The values of p are
2
1
1
2
1 2
1 1 1
1 2 12 1 2 2
1 2
1
2 1
12 2
2
1
12
k
k
k
k
k k
k k k
p k p k p k
k k
k
k k
p k
p
k
p
The minimum error is then defined as:
J x ( 0 ) P x ( ) 0
T = ⋅ ⋅
1 2
1
1
2 1
1
1
2
12 2
1 12 x
k k
k
k
k k
k
k
k
x x p p
p p J x
T T ⋅
Assume that there are unit initial conditions
[ ]
1 2
1
2 1 1
1
1
2
1 2
1
1
2 1
1
1
2
k k
k
k k k
k
k
k
k k
k
k
k k
k
k
k
J
1 2
2 1
2 1
2 2
1 2
1 1
2 1
2 2 2
1 2
1
2
1
1
2
1 2
k k
k k k k
k k
k k k k k
k k
k
k
k
k
k
k
J
Minimize J with respect to k 2 , (use the magical assumption that k1=1)
2 1 2
1
2 1
2 2 2 1 2
2 1
2 1
2 2
1 2
2
2
k k
k k k
k k
k k k k
k k
k J dk
d
Reducing
2 1 1 0
2 1
2
k 2 − k − ⋅ k − = or ( )
2 1 1
2 1
2 k 2 = k + 2 ⋅ k + 1 = k + 1
Magic assumption, let k1=
Then
k 2 = 2
The error becomes
2 2 = =
J =
And finally
H A B K
The characteristic equation is
( ) ( ) 2 1 1 2
det det
2 ⎥= + ⋅ + ⎦
Δ = ⋅ − + ⋅ = s s s
s s s I A B K
Also
1 2
1
1
2 1
1
1
2
12 2
1 12
k k
k
k
k k
k
k
k
p p
p p P
12 2
1 12
p p
p p P
And to prove the condition
Using I H P P H
T − = ⋅ + ⋅
Optimal Control System with feedback
For an arbitrary cost function based on the output …
∫ (^ ( )^ ( )^ ( ))
∞ = ⋅ ⋅ + ⋅ ⋅ 0
2 J xt Q xt R ut dt
T
The solution for the optimal feedback is (proof not shown)
K R B P
T = ⋅ ⋅
− 1
where P is defined based on
A P P A P B R B P Q
T T = ⋅ + ⋅ − ⋅ ⋅ ⋅ ⋅ +
− 1 0
The above equation is called the Riccati equation
This form of controller is defined as a linear quadratic regulator (LQR).
MATLAB Tools:
lyap: Solve continuous-time Lyapunov equation
H P P H Q
T 0 = ⋅ + ⋅ +
care: Solve continuous-time algebraic Riccati equation
A P P A P B R B P Q
T T = ⋅ + ⋅ − ⋅ ⋅ ⋅ ⋅ +
− 1 0
That’s all for this chapter …please take a state-space systems class for more ….