


第第第第第第第第第第第第第
第第第第第第第第第第第第第
第第第
第第第第第第第第第第第
















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A set of lecture notes from a particle physics course covering track finding and fitting techniques using kalman filters and riemann fits. Topics include circle fitting, helix fitting, multiple scattering effects, and the use of state vectors and error matrices.
Typology: Study notes
1 / 40

This page cannot be seen from the preview
Don't miss anything!
第第第第第第第第
第第第第第第第第
第第第 第第
第第第第第第第第
第第第第第第第第第第第第第第第
第第第第第第第第第第第第第第第第第第第第
第第第第第第第第第第第第第第第
第第第第第第第第第第第第
第第第 第第第第第第第第第第第第第第
第第第第第第第第第第第第
第第第第第第第第第第第第第第第第
第第第 第第第第第第第第
第第第第第第第第第第第第第第第第第第第第第
第第第第第第第第第第第第
第第第第第第第第第第第第第第第第
第第第 第第第第
第第第第第第第第第第第第第第第第第第第第
第第第第第第第第第第第第第
第第第第第第第第第第第第第第第第第第第
第第第 第第第第第第第第第第第第第第第第第
第第第第第第第第第第第
第第第第第第第第第第第第第第第第第
第第第 第第第第第第第第第
第第第第第第第第第第第第
第第 (Approximate) 第第第第 (fast)
第第 (Precise) 第第第第 (slow)
2D Circle fitting (2 第第第第第第第 , 第第第第第第第第第第第第第第 )
3D Helix fitting (3 第第第第第第 )
Kalman filter method
第第第第第第
第第第第第第
Global least-squares method
Global least-squares method
Used for many decades in
HEP/Nuclear experiments.
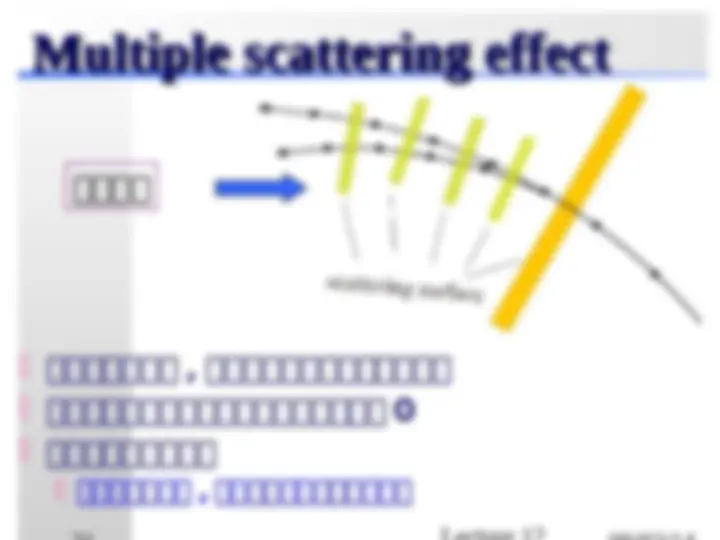
Proper treatment of elastic,
multiple Coulomb scattering
included in the method during the
70’s.
Close to optimal in precision, but
may be computationally quite
expensive with a large number of
measurements and/or a large
number of scattering device.
第第第第
第第第第
第第第第
第第第第第第第第第第第第第
第第第第第第第第第第第第第
第第
第第
第第 : 第第第第
第第 : 第第第
第第第第第
第第第第 + 第第第
第第第第第第第第第第第第第第
第
i cell D W i
i W D L
(S S ) /
S tan
i
i i
圆圆圆圆圆
2
i c
2
i i c
2
i
2
d x x y y
d R
N
1
2 R
x x y y R
N
1
2
2
i c
2
i c 2
圆 d
i
~R, 圆圆圆圆
圆圆圆
3 parameters for each circle: , ,
c c
x y R
, ,
i i i i
x y
圆圆圆圆 X-Y 圆圆圆圆 :
Circle fitting: Least-Square method
Circle fitting: Least-Square method
2
2
i c
2
i c
2
圆圆圆圆圆 BES2 圆 L3, OPAL 圆
2
i
2
i i
2
i i i i
2
i i i i
z R 1 R
y R sin 1 R
x R cos 1 R
圆圆圆圆圆圆 / 圆圆圆圆圆圆圆圆圆圆圆圆
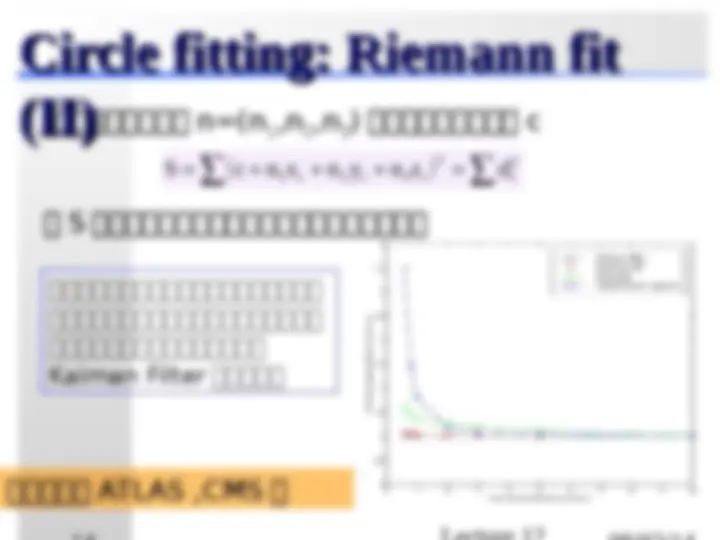
Circle fitting: Riemann fit
Circle fitting: Riemann fit
(I)
(I)
2
i
2
1 i 2 i 3 i
S c n x n y n z d
1
2
3
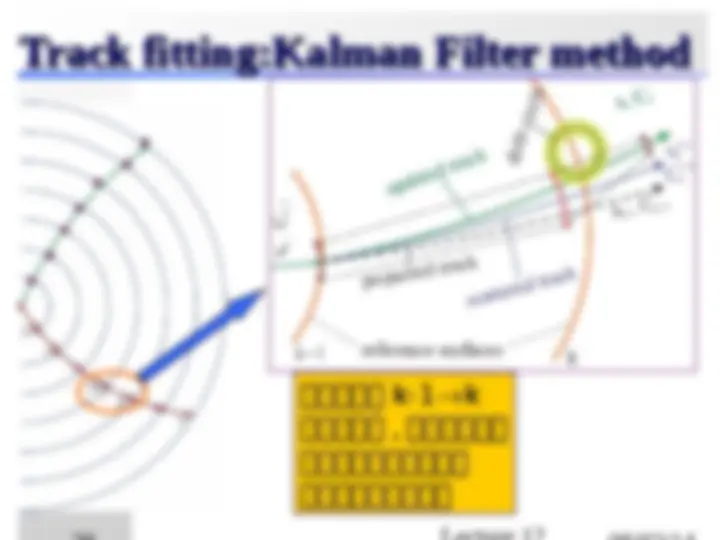
圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆
圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆
圆圆圆圆圆圆圆圆圆圆圆圆圆圆圆
Kalman Filter 圆圆圆圆圆
Circle fitting: Riemann fit
Circle fitting: Riemann fit
(II)
(II)
2
d
1
y
1
1
y
T T
m
1
y
T
m
2
m
1
y
T
0
1
, V diag
d
A
V A V A
d d V d d
V A V (d d )
圆圆圆圆
圆圆圆圆
Helix fitting: Least-Square method
Helix fitting: Least-Square method
第第第第
第第第第
第第第第
第第第第第第第第第第第第
BES3 第第第第第第
BES2 第第第第第第第
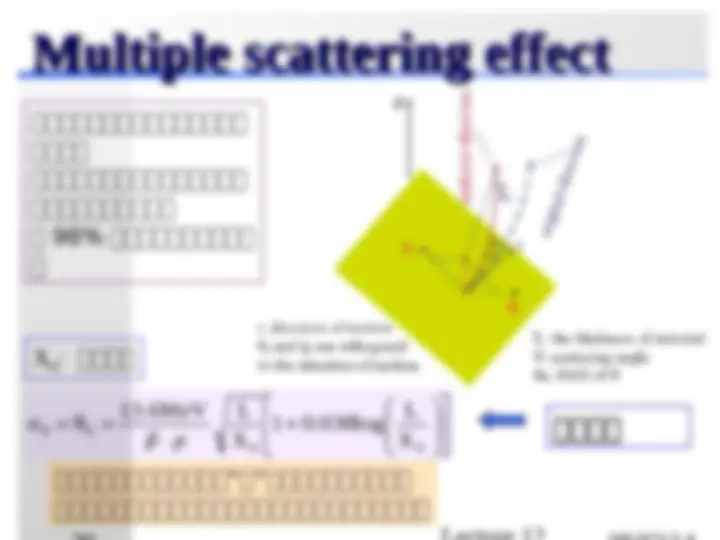
2
ms
2
res
2
xy
R
1
BR
p c
cos
0
2
ms
2
xy
res
cos
4
720
X
L
Lp
L N
BES2: Bhabha 圆圆
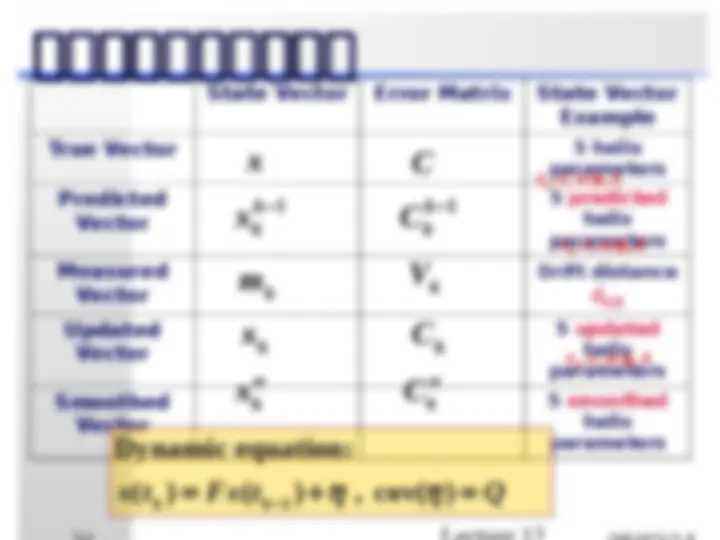
Kalman Filter
Kalman Filter
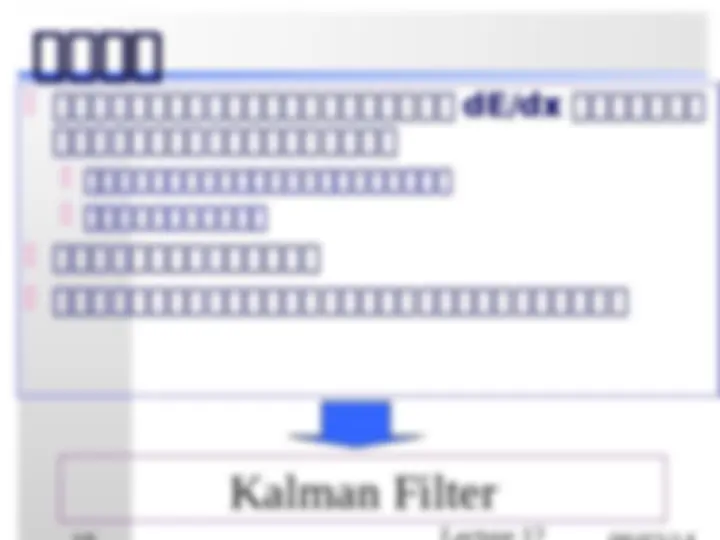
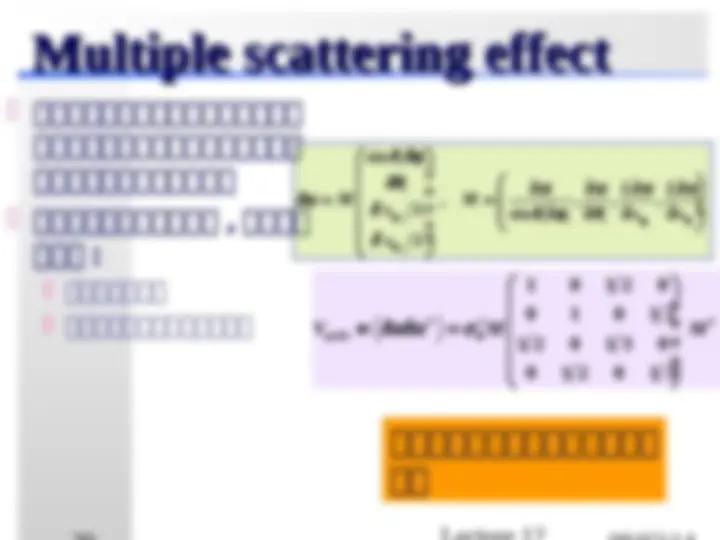
第第
第第
第第第第第第第第第第第第第第第第第 , 第第第第第第第第第第第第第
第第 , 第第第第第第第第第第 , 第第第第第第第第第第第第
第第第第 , 第第第第. 第第第第第第第第第第第第第第第第第第 , 第
第第第第 , 第第第第第第第第第第第第第
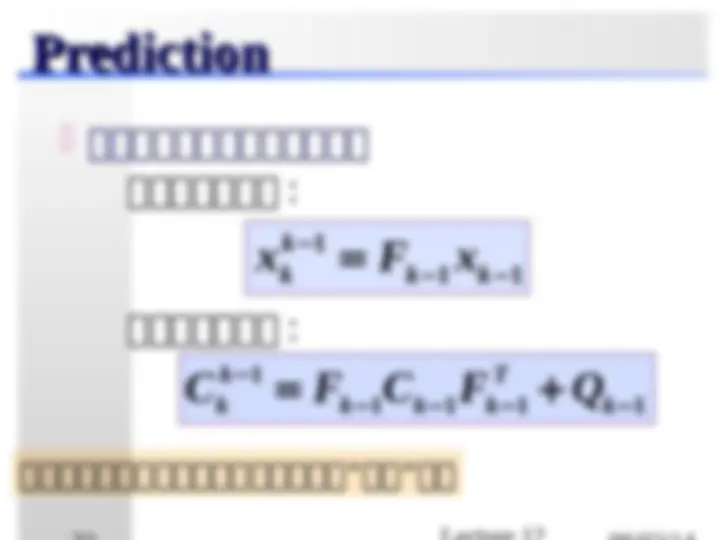
Kalman Filter
Kalman Filter