Download Diagnostic et Surveillance des Systèmes Industriels: Modèles Quantitatifs and more Cheat Sheet Electronics in PDF only on Docsity!
Université Hassiba Benbouali de Chlef
Faculté de Technologie
Département d’Electronique
Cours
Détection et Localisation des Défauts
Master 2
Automatique et Informatique Industrielle
TAHRAOUI SOUAAD Maître de Conférences A, HDR
Avant-propos
Ce document est un support de cours qui s’adresse aux étudiants de 2ème^ année de la
formation Master automatique et informatique industrielle. Ce cours permettra à l’étudiant
d’acquérir les notions de base sur le diagnostic des systèmes dynamiques par les outils
observateurs d’état (générateurs des résidus).
Dans le cadre de ce cours, nous nous intéressons principalement vu à la théorie du diagnostic
à base modèle mathématique spécifiquement les observateurs linéaires pour les systèmes
linéaires.
CHAPITRE 2 : GENERATION DES RESIDUS A BASE D’OBSERVATEUR
(observateur proportionnel)
On présente dans ce chapitre la méthode de génération de résidus à base observateur proportionnel.
CHAPITRE 3 : GENERATION DES RESIDUS A BASE D’OBSERVATEUR A
ENTREES INCONNUES AVEC DECOUPLAGE PARFAIT
On présente dans ce chapitre la méthode de génération de résidus à base observateur à entrées inconnues avec découplage parfait.
Mode d’évaluation:
100% évaluation continue
Références bibliographiques:
[Beard, 1971] , R.V. Beard. «Failure Accommodation in Linear Systems Through Self Reorganization», PhD dissertation, MIT, Dep, Aero, Astro Cambridge, Février 1971. [Courtine 2006] , S. Courtine, «Détection et localisation de défauts dans les entrainements électriques», thèse de doctorat, Institut National Polytechnique de Grenoble, 2006. [Husson et al. 2007] , R. Husson, C Lung, J. F. Aubry, J. Daafouz, D. Wolf, «Automatique (Du cahier des charges à la réalisation de systèmes)», Livre Dunod Edition, 2007. [Ragot et Maquin, 2000] , J. Ragot, D. Maquin, «Diagnostic des systèmes linéaires», Collection Pédagogique d’Automatique. Hermès Science Publications, Paris, 2000. [Toscano 2011] , Toscano, «Commande et diagnostic des systèmes dynamiques (Modélisation, Analyse, Commande par PID et par retour d’état, Diagnostic)» , Livre Ellipses Edition, 2011.
SOMMAIRE
CHAPITRE 1: INTRODUCTION AU
DIAGNOSTIC
1.1. Introduction Le diagnostic, suscite depuis les années 1970 un intérêt croissant tant au niveau du monde industriel que de la recherche scientifique, dans l’objectif vis à développer des systèmes de diagnostic en vue d'assurer la maintenance intelligente ou prédictive des industriels, donc l'objectif est de développer des générateurs de résidus robuste (indicateurs de défauts) de l'installation qui sont utilisés pour détecter le dysfonctionnement et le localiser.
C'est une évidence de distinguer que la commande des systèmes devient de plus en plus complexe, cela est dû à la nature des systèmes, mais aussi à la volonté de contrôler tous les paramètres et toutes les perturbations affectant le système. Dans cette dynamique s’est développée la discipline de la sûreté de fonctionnement. Pour un grand nombre d'applications, il est nécessaire d'implanter un système de surveillance au niveau des organes de conduite (actionneur, capteur d’instrumentation) afin de détecter et isoler et identifier tout dysfonctionnement.
De manière générale, lorsqu’on parle de diagnostic des défauts, on se réfère à la procédure de détection et d’isolation de ces derniers, que l’on retrouve souvent sous le nom FDI (Fault Detection and isolation). Cette procédure nous permet d’avoir des informations sur l’apparition d’un défaut et sur sa provenance le plus rapidement possible. En effet, de nombreux chercheurs ont investi dans ce domaine proposant alors diverses approches et techniques répondant à la diversité des applications.
L'un des outils du diagnostic le plus précieux c'est les méthodes à base observateur, de sort que cette approche de diagnostic à base modèle repose sur l'utilisation d'un modèle (physique, mathématique….) du système étudié. Une comparaison entre les sorties du modèle et les signaux mesurés, provenant du système réel, peut être effectuée à la détection et la localisation de défauts. Précisément nous allons utiliser les observateurs à entrée inconnue avec découplage parfait du système linéaire pour éviter les fausses alarmes.
Nous proposons dans ce chapitre de faire un état de l’art sur le diagnostic des défauts. L’intérêt se portera fondamentalement sur le problème de détection et d’isolation des défauts. Il est question dans un premier temps, de donner les différents concepts et notions rencontrés dans les littératures concernant le diagnostic des défauts, car un bon diagnostic nécessite une bonne compréhension de ces notions. Le principe de base de diagnostic sera alors présenté ainsi que les différentes méthodes proposées dans ce domaine.
D’autre part, nous nous intéressons sur la procédure générale de détection et d’isolation des défauts par les méthodes à base de modèle mathématique. Cette dernière passe par deux étapes essentielles : la génération et l’évaluation du vecteur résidu.
1.2.5. Panne
La panne est l'inaptitude d'un dispositif à accomplir la fonction nécessaire. Il est clair que dès l'apparition d'une défaillance, caractérisée par la cessation du dispositif à accomplir sa fonction, on déclarera le dispositif en panne. Par conséquent, une panne résulte toujours d'une défaillance.
Dans le cadre de maintenance préventive conditionnelle, il est clair que le diagnostic doit permette de détecter et de localiser un défaut avant que celui-ci ne conduise à une défaillance ou à une panne qui entrainerait l’arrêt du système.
1.2.6. Dysfonctionnement
Exécution d'une fonction du système au cours de laquelle le service rendu n'est pas délivré ou est délivré de manière incomplète.
1.2.7. Perturbation
C’est un signal d'entrée non contrôlé dont la présence est non souhaitable mais considérée comme normale.
1.2.8. Sensibilité
Représente la capacité d’un système de diagnostic à générer des résidus sensibles aux défauts à détecter. Ces défauts sont généralement caractérisés par une certaine amplitude.
1.2.9. Résidu
Souvent, lorsque le modèle comportemental de référence est analytique, les signaux porteurs de signes ou de symptômes sont appelés résidus parce qu'ils résultent d'une comparaison entre un comportement réel et un comportement de référence. Alors le résidu est un indicateur de défaut basé sur la déviation entre les mesures et les calculs basés sur un modèle.
Un résidu ou un indicateur de défaut exprime l’incohérence entre les informations disponibles et les informations théoriques fournies par un modèle. C’est sur la base de sa valeur que la décision de détection est prise ou pas. Un résidu nul implique un fonctionnement normal. En pratique, le résidu est conçu afin d’être nul en moyenne dans un cas de bon fonctionnement. Ses dispersions autour de zéro sont des "restes", des résidus liés aux bruits. En revanche dans un cas avec défaut, le résidu s’éloigne de sa valeur moyenne nulle et permet d’indiquer la présence d’un défaut.
1.2.10. Détection de défauts
La détection de défaut consiste à la détermination de la présence de défauts et de l'instant d'occurrence de ces défauts.
1.2.11. Localisation de défauts
Il s’agit de la détermination du type, de la localisation et de la date d'un défaut détecté. Consiste à remonter d'un ensemble de symptômes à un ensemble de composants défaillants.
1.2.12. Identification de défauts
L’identification est la détermination de la taille et du comportement temporel d'un défaut (fonction qui suit la localisation), il s’agit de déterminer le ou les éléments à l’origine du défaut.
1.2.12. Signature
Est le vecteur booléen caractérisant la réaction d’un vecteur de résidus à une défaillance particulière.
1.2.13. Robustesse
Elle détermine la capacité du système à détecter des défauts indépendamment des erreurs de modélisation (sensibilité du résidu aux défauts et insensibilité vis-à-vis des perturbations). Généralement, la robustesse est définie par rapport à toutes les entrées inconnues. En pratique, d’autres critères sont à prendre en considération. En phase d'industrialisation, les contraintes ergonomiques et économiques sont essentielles. La rapidité de détection peut être un facteur déterminant. De même, les coûts économiques vont conditionner la stratégie de diagnostic.
1.2.14. Surveillance
Ensemble de fonctions s’exécutant en temps réel ayant pour but de reconstituer l’état réel du procédé au sein de modèles utilisés par le système de conduite du procédé. Elle Consiste en l’enregistrement de l’information ainsi qu’en la reconnaissance et l’indication de comportements anormaux.
La surveillance de la majeure partie des procédés industriels se limite à des systèmes de traitement d’alarmes. Des valeurs limites sont définies sur des variables clés par des experts du procédé selon des critères de sécurité concernant les hommes, l’installation et son environnement.
Les mesures au-delà de ces valeurs limites déclenchent des alarmes. Un système de traitement d’alarmes est donc l’outil de base pour aider l’opérateur dans sa tâche de surveillance. Il reste cependant aux opérateurs à analyser la situation et à prendre une décision adaptée : actions correctives, conduite en mode dégradé, activation d’une procédure d’arrêt d’urgence. L’efficacité de l’opérateur est primordiale que ce soit du point de vue économie ou sécurité.
1.2.15. Supervision
Représente la surveillance d'un système physique et la prise de décisions appropriés en vue de maintenir son opération face à des défaillances.
Figure 1.1. Défauts d’un processus physique
1.3.2. Modélisation
En plus, suivant la manière dont les défauts sont modélisés, ils sont classés en additif et multiplicatif, comme représenté sur la figure 1.
Figure.1.2. Les défauts selon leur représentation
1.3.3. Caractéristiques temporelles
Les défauts sont classés également selon leurs caractéristiques temporelles (voir la figure 1.3) comme brusque, progressif et intermittent. Les défauts brusques (biais) se produisent instantanément souvent à cause de dommages matériels. Habituellement ils sont très graves car ils affectent les performances et/ou la stabilité du système commandé. Les défauts progressifs (dérives) représentent les changements lents des valeurs paramétriques. Souvent dus au vieillissement, Ils sont plus difficiles à détecter en raison de leur dynamique lente, mais sont également moins graves. Les défauts intermittents (valeurs aberrantes) sont des défauts qui apparaissent et disparaissent à plusieurs reprises, par exemple à cause d'un câblage partiellement endommagé [Tahraoui 2015], [Tahraoui 2017].
Capteur
Défaut commande Défaut^ actionneur Défaut^ système
Défaut capteur
Défauts
Signal Signal Défaillant
Défaut additif
Défauts
Signal Défaillant
Signal
Défaut multiplicatif
Figure.1.3. Répartition des défauts selon le comportement temporel
1.4. Principe de la surveillance
Un système de surveillance doit permettre de caractériser le mode de fonctionnement d'un système en enregistrant des informations, en reconnaissant et en indiquant les anomalies de comportement. Cette surveillance peut être réalisée en cours exploitation ou hors exploitation et chaque mode présente chacun un certain nombre d'avantages et d'inconvénients.
Système de surveillance doit réaliser les trois taches suivantes :
La détection : qui consiste à prendre une décision binaire : soit le système fonctionne correctement, soit une panne s'est produite. Le cas échéant, la procédure doit déterminer l'instant d'occurrence du défaut ayant provoqué la panne.
La détection : La détection concerne la mise en évidence d'événements qui affectent l'évolution d'un système. De façon générale, un événement traduit un changement de situation sans préjugé du fait qu'il soit normal (dû à une action délibérée de la part d'un opérateur par exemple) ou anormal (dû à une défaillance par exemple). Détecter consiste alors à comparer le fonctionnement réel du système avec ce qu'il devrait être sous l'hypothèse du fonctionnement normal.
Un défaut est détecté en comparant une fonction d’évaluation des résidus à un seuil.
() ( ) 0
() ( ) 0
r t T f t
r t T f t
Défaut Défaut Défaut
Temps Biais
Temps Valeur aberrante
Temps Dérive
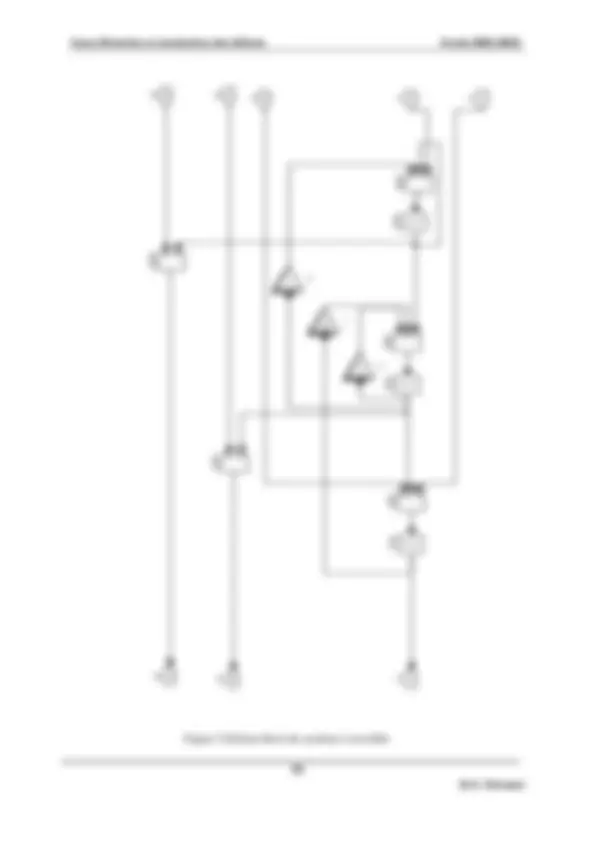
Exemple :
3
2
1
32 33
22
11 13
3
2
1
f t
f t
f t
G G
G
G G
r t
r t
r t f^1 f^2 f 3
r 1 1 0 1
r 2 0 1 0
r 3 0 1 1
La tâche de localisation circonscrit la défaillance à un sous-ensemble du système surveillé. Elle consiste à analyser les événements de façon à pouvoir déterminer le ou les défauts d'instruments de mesures (défaut de type capteur), le ou les défauts d'actionneurs, le ou les composants défectueux du système.
L'identification, qui consiste à déterminer le type de la panne en vue de déterminer le type de maintenance ou de correction (accommodation, reconfiguration) a réalisé sur l'installation. Cette étape nécessite souvent la connaissance d'un modèle de la panne. Beaucoup de systèmes de surveillance n'implémentent que les deux premières tâches. L'identification d'une panne n'est réalisée que lorsqu'une action de reconfiguration de la commande ou des objectifs à atteindre est envisagée. Lorsqu'un algorithme de surveillance ne comporte que ces deux tâches, il est qualifié d'algorithme de FDI (Fault Detection and Isolation).
Pour répondre à la démarche de diagnostic, il existe de nombreuses approches dans la littérature.
1.5. Surveillance utilisant les modèles
L’utilisation des modèles pour la surveillance des systèmes date du début des années 70. La figure (1.5) illustre le concept général d’un système de diagnostic utilisant un modèle. Ces méthodes reposent sur l’étude de signaux appelés résidus.
Définition : Un résidu est un signal potentiellement indicateur de défauts. Il reflète la cohérence des données vis-à-vis du modèle comportemental du système.
Les méthodes de surveillance à base de modèle utilisent la redondance d’information présente sur un système. Deux types de redondance peuvent être distingués : la redondance matérielle et la redondance analytique.
Figure.1.5. Principe de génération de résidu à base de modèles
1.5.1. Redondance physique (matérielle)
Le moyen le plus direct pour obtenir une information fiable sur une même variable est de disposer de plusieurs capteurs la mesurant simultanément. Une redondance à trois permettra notamment d'isoler un capteur défaillant. La redondance physique souffre d'un désavantage majeur : doubler ou tripler le nombre de capteurs revient à augmenter considérablement son coût et à affronter des problèmes d'encombrement liées à l'installation et à la maintenance de ces capteurs (figure 1.6).
Figure. 1. 6. Redondance physique L'ajout de capteurs supplémentaires permettra aussi d'avoir des informations additionnelles à mettre à profit dans le cadre de la redondance analytique [Courtine 2006].
Un ensemble de capteurs similaires surveillent simultanément une même pièce. Tant que les valeurs délivrées par ces capteurs restent égales entre elles, l'information est considérée comme fiable car il est très improbable que tous les capteurs fassent la même erreur de mesure au même instant. Si une de ces
Actionneurs Processus Capteurs
Défauts
Entrées inconnues (perturbations, bruit de mesure,……)
U(t) (^) Y(t)
Génération de résidus
Prise de décision
Défauts
Capteur 1
Capteur 2
Mesure 1
Mesure 2
Capteur 3 Mesure 3
Redondance physique
Redondance analytique
Figure.1.7. Architecture de redondance physique et analytique Le concept de redondance analytique repose sur l’utilisation d’un modèle mathématique du système à diagnostiquer. Pour cette raison, les méthodes utilisant la redondance analytique pour le diagnostic sont appelées méthodes à base de modèle.
Redondance matérielle Redondance analytique
- Très fiable
- Très couteuse
- Occupe beaucoup de place
- Moins fiable
- Moins couteuse
- Moins de place occupée
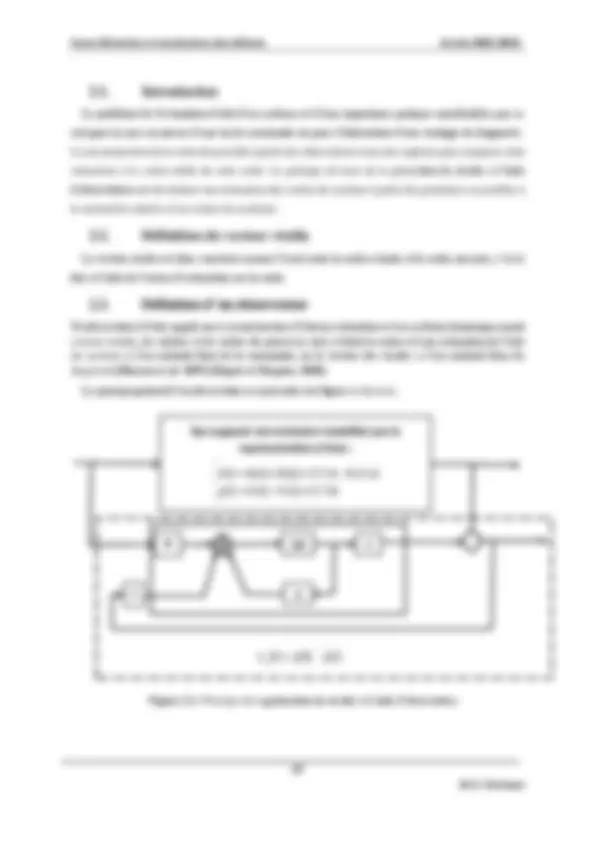
1.6. Détection et isolation des défauts (FDI)
L'intérêt porté à la détection et l'isolation de défauts (FDI) pour les systèmes s'est développé considérablement ces dernières années. En effet la conception d'un système FDI est une étape importante vers l'obtention de systèmes de commande insensibles aux défaillances. Ces développements ont non seulement concerné la formalisation théorique des problèmes rencontrés et leur résolution mais également la mise en œuvre pratique sur des processus réels.
En se basant sur les méthodes de FDI à base modèles. Ces méthodes s’appuient sur la comparaison du comportement observé et du comportement prédit par un modèle du système. Ils sont généralement constitués de deux étapes : génération de résidus et évaluation des résidus grâces à un système de décision (figure 1.7).
Processus
Ensemble de capteurs redondants
Ensemble de capteurs Prise de décision
Algorithme de FDI utilisant un modèle
Entrées Sorties Alarmes
Le rôle de ce système de décision est de déterminer si le résidu est significatif pour décider de l’existante d’un défaut.
1.7. Principe du diagnostic
Le diagnostic détermine comment une faute affecte les sorties du processus. Dans l'approche FDI décrite auparavant, la détection d'erreur et le diagnostic de faute(s) regroupent trois étapes :
1- détecter l'existence d'une erreur, 2- localiser la faute, 3- caractériser l'amplitude de la faute (identifier) L’étape de détection et de localisation sont toujours mis en œuvre en surveillance. La localisation est introduite lorsqu'aucune décision d'action sur la commande n'est pas requise. La localisation et l’identification constituent le diagnostic de fautes. La combinaison des trois fonctions présentées est définie par la stratégie de surveillance ou de supervision mis en œuvre. L'algorithme de diagnostic doit être : insensible aux perturbations, rejeter les bruits, robuste par rapport aux erreurs de modélisation, et sensible par rapport aux défauts (figure 1.8).