



COURS PERCEPTION
Dernière séance











Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Dans ce document, nous abordons deux théories majeures de la reconnaissance d'objets : celle de Marr et Nishihara (1978) et celle de Biederman (1987, 1995). Ces théories proposent des représentations 3D des objets et des méthodes de reconnaissance basées sur des primitives et des géons. Marr et Nishihara proposent que les primitives élémentaires de la reconnaissance des objets sont des cylindres possédant un axe principal, tandis que Biederman considère que les objets peuvent être décomposés en formes tridimensionnelles simples appelées « géons ». Les géons sont ensuite combinables pour former des entités significatives et différentes.
Typology: Assignments
1 / 29

This page cannot be seen from the preview
Don't miss anything!
Dernière séance
La reconnaissance des objets intervient au niveau 3. Les deux étapes préalables sont des étapes perceptives. Pour Marr et Nishihara (1978), une représentation 3D doit satisfaire 3 critères. Accessibilité^ Accessibilité Applicabilité et stabilité Applicabilité et stabilité Similitude et sensibilité Similitude et sensibilité
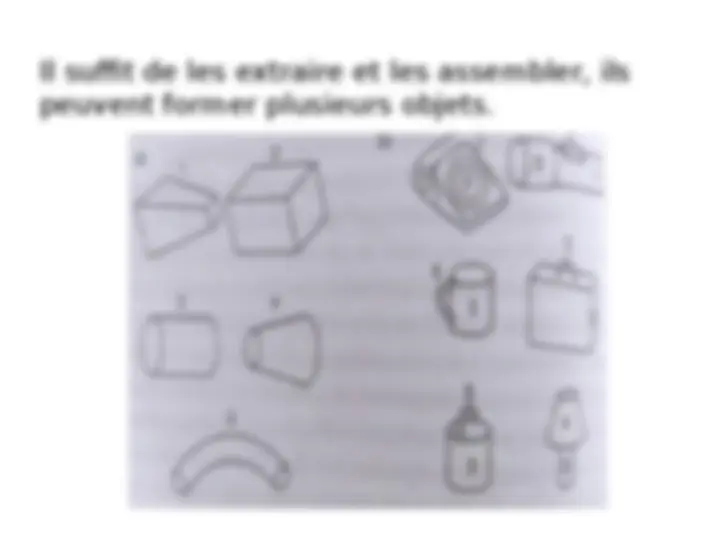
Marr et Nishihara (1978) ont proposé l’idée selon laquelle les primitives élémentaires de la reconnaissance des objets étaient des cylindres possédant un axe principal. Ces primitives sont hiérarchiquement organisées. Les primitives de haut niveau fournissent des informations sur la forme générale de l’objet, les primitives de bas niveau fournissent les informations les plus détaillées sur l’objets; L’une des raisons avancées par les auteurs pour ce genre de primitives est que les axes des objets constituent les éléments des objets les plus faciles à détecter et à se représenter mentalement. Cette conception est illustrée par la figure suivante pour le cas de la reconnaissance d’une forme.
Ivring Biederman, dans sa théorie, procède par analogie entre les processus impliqués dans la reconnaissance des objets et ceux impliqués dans la reconnaissance des mots. Ainsi tout comme les mots qui peuvent être décomposés en éléments plus simple (les lettres), les objets que nous percevons sont décomposables en formes tridimensionnelles simples appelées « géons ». Comme les lettres de l’alphabet, ils sont ensuite combinables pour former des entités significatives et différentes. Le travail de
L’ensemble des objets existants pourrait être décrit par 24 géons déterminés par quatre formes principales:
Une fois les géons sont assemblés, l’ensemble formé est comparé aux représentations stockées en mémoire à long terme. C’est l’appariement conduisant à la reconnaissance de l’objet. Ce modèle postule une segmentation de la forme en composantes avant l’accès aux représentations d’objets et une description des représentations structurales des objets en termes d’assemblage de structures locales. Le modèle de Biederman prédit qu’un objet
Biederman a fait une expérience. Il a demandé à des sujets de reconnaitre un objet dans trois conditions. Dans la condition contrôle, il présentait aux sujets une représentation schématique de l’objet sous forme d’assemblage de géons. Dans une seconde condition un géon était retiré de la représentation. Enfin dans la dernière condition des segments étaient effacés sur chacun des géons.
Biederman et ses collaborateurs ont constaté qu’un objet est généralement placé dans un contexte qui facilitent son identification. Donc ils ont identifiés cinq règles permettant de caractériser une scène visuelle bien organisée. Règles définies par des contraintes physiques Règles définies par des contraintes sémantiques La règle de support: un objet doit se reposer sur une surface La règle de probabilité: la présence d’un objet est plus probable dans une scène que dans une autre La règle d’interposition: les objets opaques masquent les objets situés derrière La règle de localisation spatiale: un objet occupe un endroit spécifique La règle de la taille: un objet doit avoir une taille spécifique par rapport aux autres objets.
Le modèle des géons est un modèle de traitement de l’information. Il isole des étapes permettant la reconnaissance des objets: 1.Segmentation du champs visuel: c’est l’étape de l’encodage des objets. Pour cela, ils sont spécifiés les uns des autres. Cette activité de segmentation du champ visuel s’appuie sur deux processus: l’extraction des contours des objets et le traitement des régions concaves (rentrantes).
3.Appariement: cette dernière étape consiste à apparier l’assemblage des géons à des modèles d’objets entreposés en mémoire. Une fois identifiés, les géons sont assemblés par le système cognitif. Ensuite, l’ensemble est comparé à des patrons stockés en mémoire. Si un patron stocké ressemble à une forme, l’objet est reconnu.
Le modèle des géons suggère qu’une telle théorie permet d’expliquer la reconnaissance des objets des conditions optimales de perception, mais également dans des conditions non-optimales. En effet pour Biederman, nous arrivons à reconnaître les objets dans de mauvaises conditions perceptives puisque :
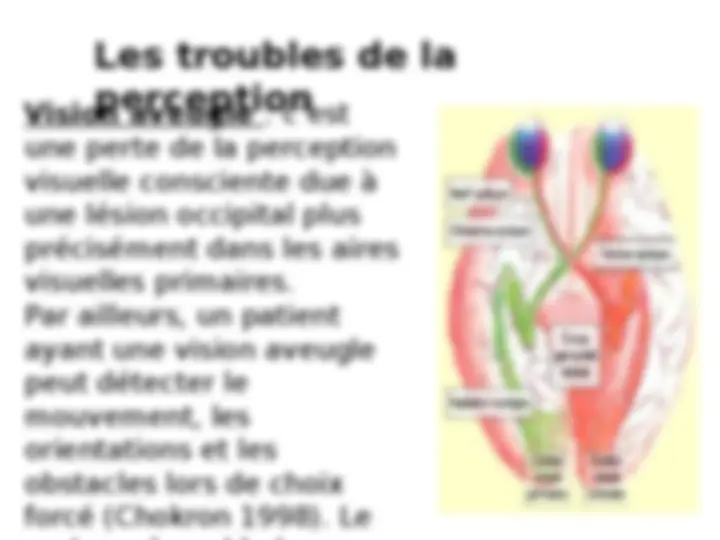
Il est hautement probable que la reconnaissance des objets résulte en général de processus coopératifs entre des ensembles de neurones déchargeant en synchronie, chacun de ces groupes de neurones répondant spécifiquement à une ou à des caractéristiques des signaux générés par le stimulus. Il est certain que la reconnaissance et l’identification des objets mettent en jeu la mémoire à long terme. Reconnaitre un objet à partir de sa seule présentation visuelle consiste alors à retrouver, à partir des informations visuelles de forme, la