



Plan 228
Dr Ihsen Benhnia Digital Signal Processor
Chapitre VI :
Programmation des DSP:
implémentation des filtres numériques































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Digital Signal Processor description and how it works
Typology: Slides
1 / 60

This page cannot be seen from the preview
Don't miss anything!
Plan 228
Chapitre VI :
Programmation des DSP:
implémentation des filtres numériques
Opérations classiques en T.N.S/
traitement numérique du signal
Algorithme Equation
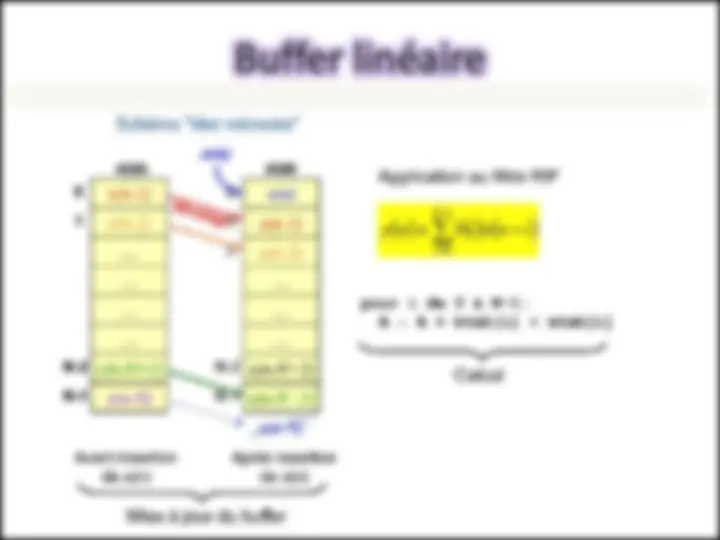
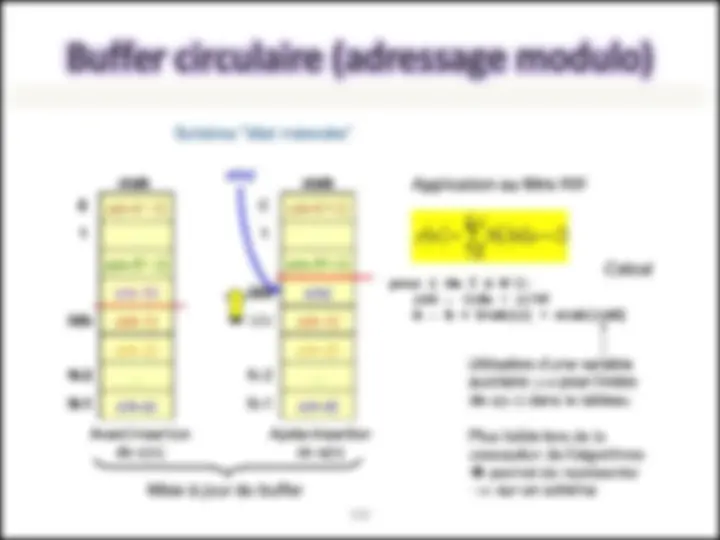
Filtres à réponse impulsionnelle finie
Filtres à réponse impulsionnelle infinie
Convolution
Transformée de Fourier discrète (TFD)
Transformée en cosinus discrète
0
y n a x n k
M
k
(^) k
0 1
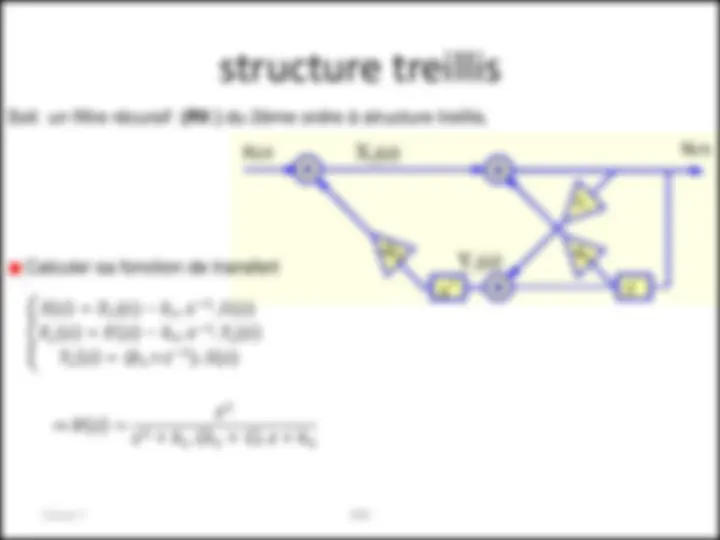
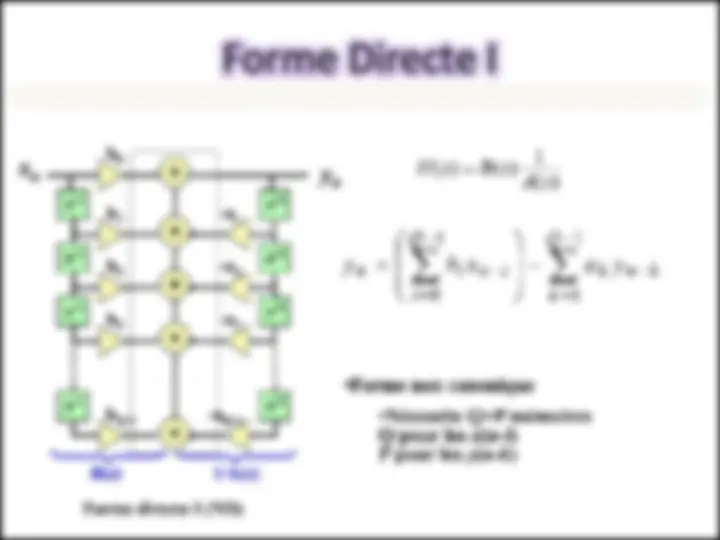
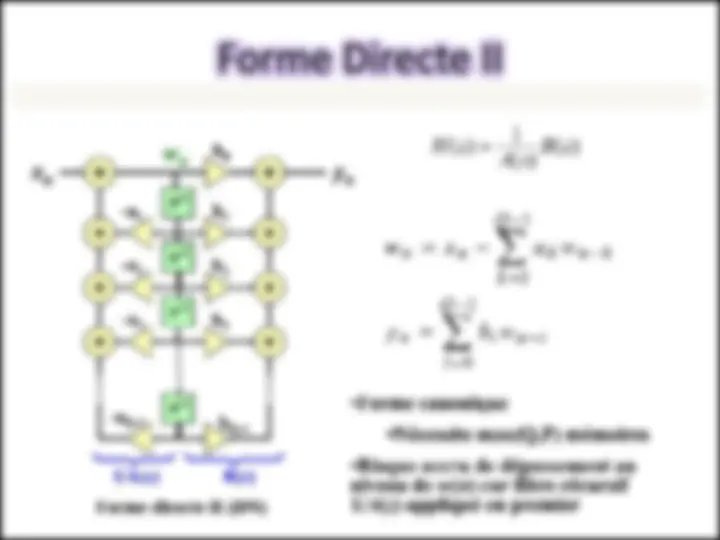
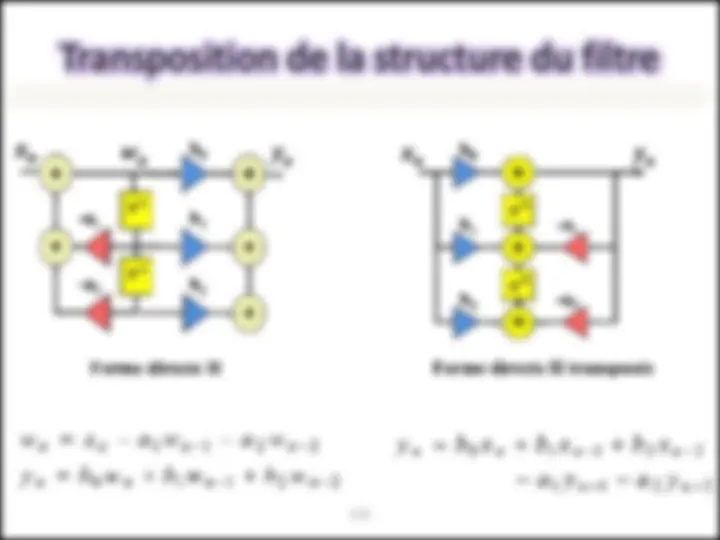
y n a x n k b y n k
N
k
k
M
k
(^) (^) k
0
y n x k h n k
N
k
( ) ( ).exp[ ( 2 / ) ]
1
0
X k x n j N nk
N
k
( ) ( ). ( ).cos[
1
0
u x N
F u c u f x
N
k
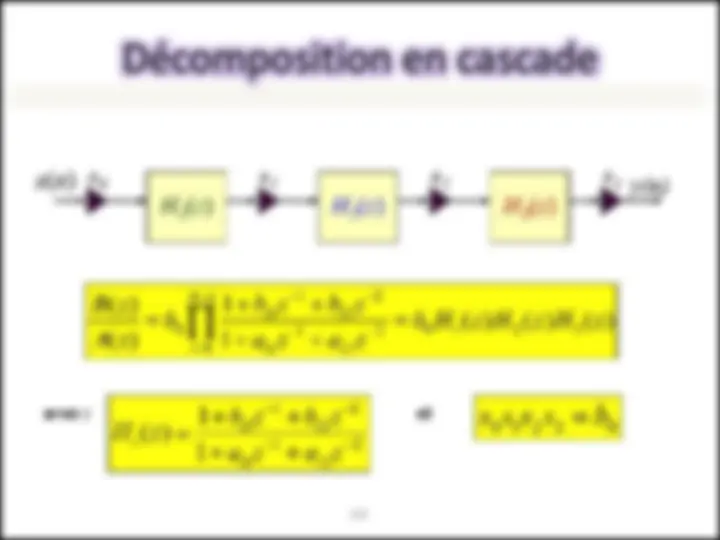
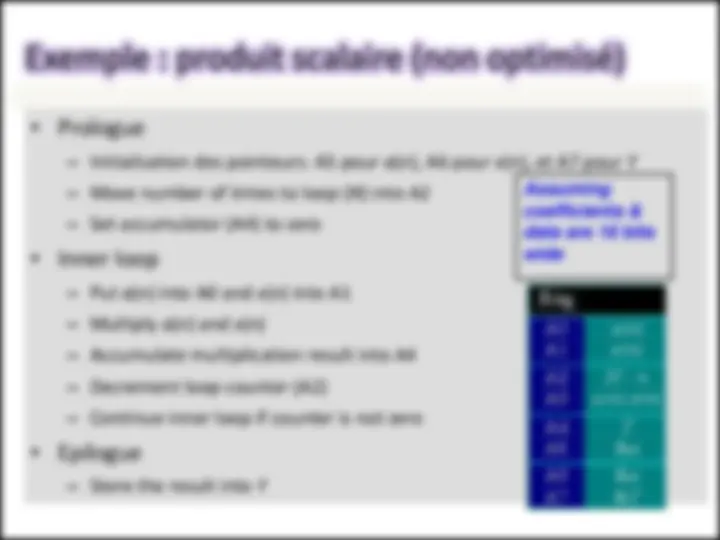
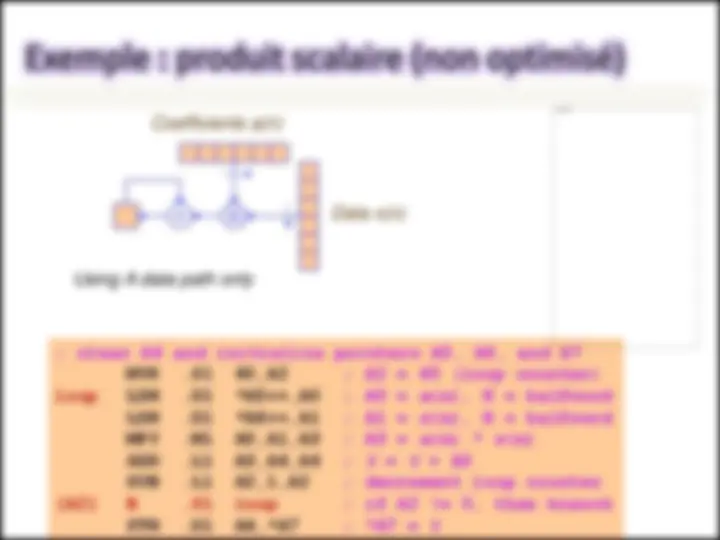
Exemple Algorithme d’un Filtre FIR
Plan 231
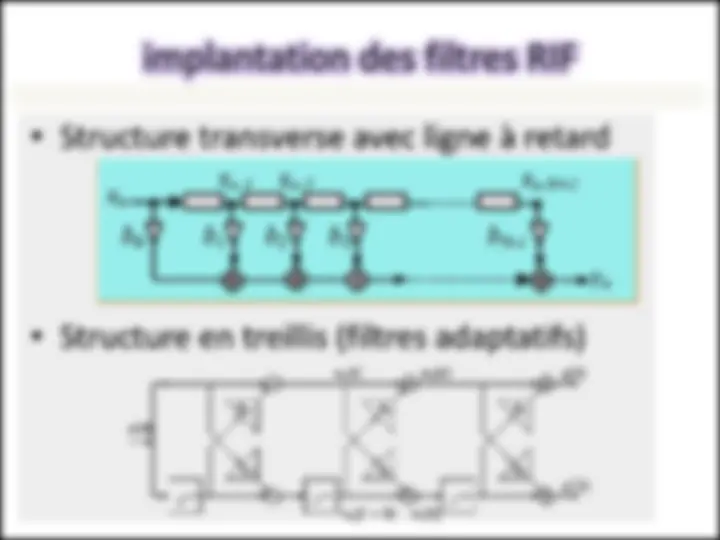
Implémentations d’un Filtre FIR (courtesy of Texas Instruments)
Architecture d’un DSP (doc. Texas Instruments)
Architecture d’un DSP (TI)
Plan 234
implémentation des filtres numériques
Echantillonnage
On considère un signal analogique xa : t → xa(t).
L’échantillonnage de ce dernier au rythme d’une période
d’échantillonnage Te revient à ne disposer des valeurs de xa qu’aux
instants multiples de Te.
Le signal ( ou suite ) numériques : x(n)= xa(nTe).
Définition
La transformée en Z est un outil mathématique de traitement du signal, qui
est « l'équivalent discret » de la transformée de Laplace.
La transformation en Z est une application qui transforme une suite s
(définie sur les entiers) en une fonction S d’une variable complexe nommée
Z , telle que:
soit x(n) = a x 1 (n) + b x 2 (n) alors X(z) = a X 1 (z) + b X 2 (z)
si y(n) = x (n – no) alors Y(z) = z –^ no^ X(z)
Le produit d'un transformée en z par z-^1 correspond à un retard unité no = 1.
Z{x(n) * y(n) } = X( z) Y(z)
Rppels
Un système est discret si à la suite discrète x(n) correspond une suite de
sortie y(n).
Un système est linéaire si à la suite x 1 (n)+a.x 2 (n) correspond la suite
y 1 (n)+a.y 2 (n).
Un système est invariant dans le temps si à la suite x(n−m) correspond
y(n−m)****.
Exemple : Considérons un signal numérique avec une équation d’E/S :
Appliquons δ(n) à l’entrée du système,
la sortie :
δ(n)
Exemple (suite)
La réponse impulsionelle du système est {b0, b1, b2, 0, 0,...}.
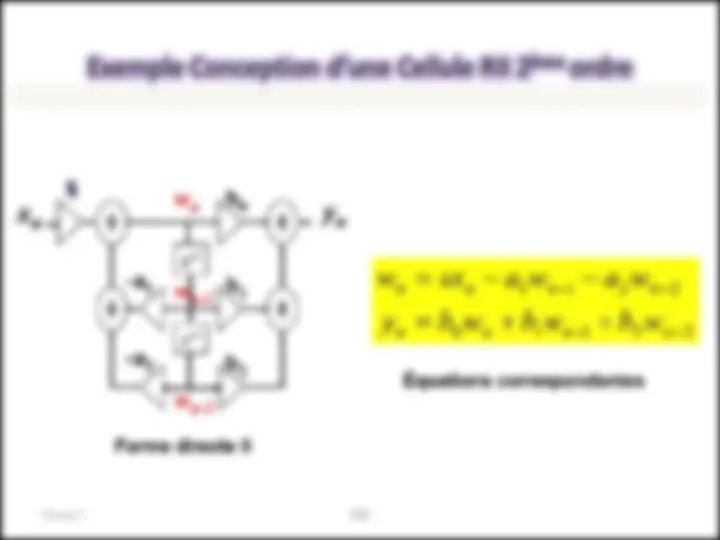
L’équation d’E/S peut être généralisée avec L coefficients :
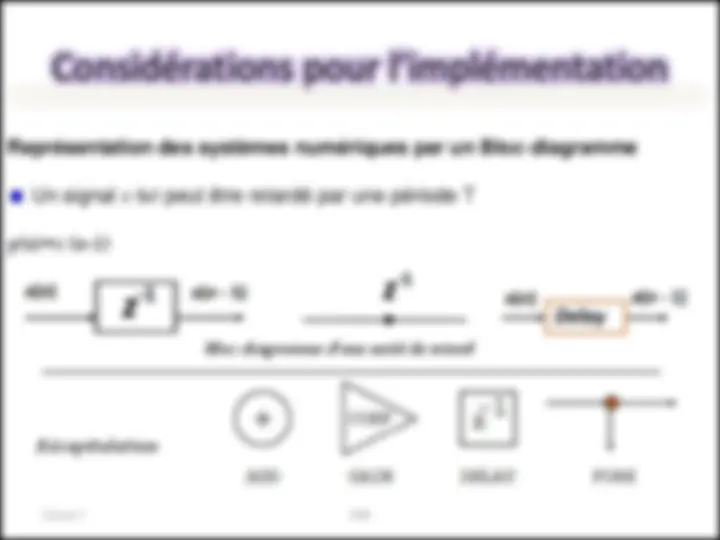
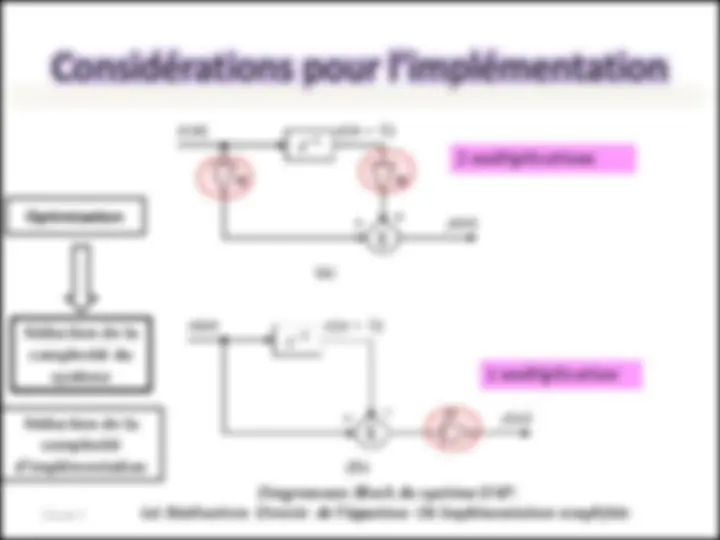
Considérations pour l’implémentation
Représentation des systèmes numériques par un Bloc - diagramme
Soit deux signaux x 1 (n) et x 2 (n) , la somme de ces signaux:
y(n)=x 1 (n) + x 2 (n),
Bloc-diagramme d’un sommateur (adder)
Considérations pour l’implémentation
Représentation des systèmes numériques par un Bloc - diagramme
Un signal x (n) peut être multiplier par un scalaire a
y(n)=a. x (n)
Bloc-diagramme d’un multiplieur (multiplier)