Download dynamic lectrure chapter 6 and more Lecture notes Mechanical Engineering in PDF only on Docsity!
VECTOR MECHANICS FOR ENGINEERS:
DYNAMICS
DYNAMICS
Tenth
Tenth
Edition
Edition
Ferdinand P. Beer
Ferdinand P. Beer
E. Russell Johnston, Jr.
E. Russell Johnston, Jr.
Phillip J. Cornwell
Phillip J. Cornwell
Lecture Notes:
Lecture Notes:
Brian P. Self
Brian P. Self
California Polytechnic State University
California Polytechnic State University
CHAPTER
Plane Motion of Rigid Bodies:
Forces and Accelerations
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Contents
16 - 2
Introduction
Equations of Motion of a Rigid
Body
Angular Momentum of a Rigid
Body in Plane Motion
Plane Motion of a Rigid Body:
d’Alembert’s Principle
Axioms of the Mechanics of Rigid
Bodies
Problems Involving the Motion of a
Rigid Body
Sample Problem 16.
Sample Problem 16.
Sample Problem 16.
Sample Problem 16.
Sample Problem 16.
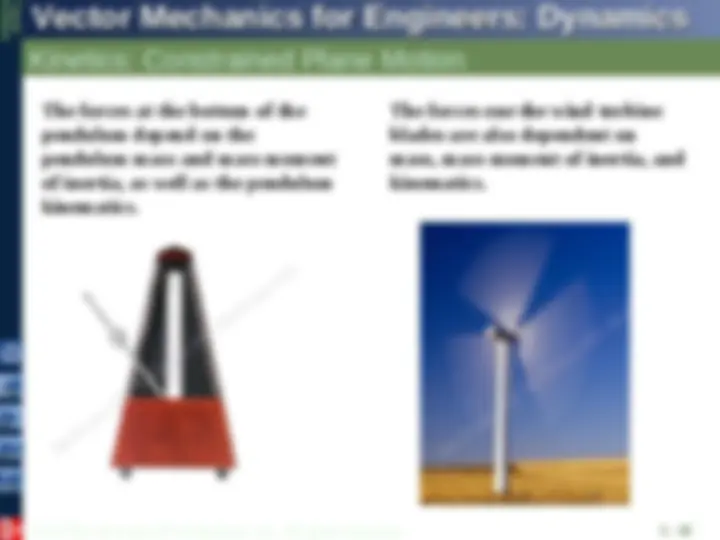
Constrained Plane Motion
Constrained Plane Motion:
Noncentroidal Rotation
Constrained Plane Motion:
Rolling Motion
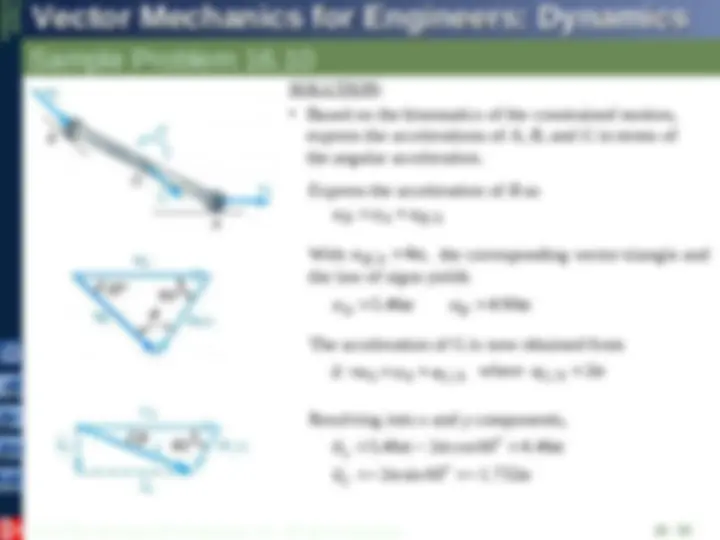
Sample Problem 16.
Sample Problem 16.
Sample Problem 16.
Sample Problem 16.
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Introduction
16 - 4
In this chapter and in Chapters 17 and 18, we will be
concerned with the kinetics of rigid bodies, i.e., relations
between the forces acting on a rigid body, the shape and mass
of the body, and the motion produced.
Our approach will be to consider rigid bodies as made of
large numbers of particles and to use the results of Chapter
14 for the motion of systems of particles. Specifically,
G G
F ma M H
and
Results of this chapter will be restricted to:
plane motion of rigid bodies, and
rigid bodies consisting of plane slabs or bodies which
are symmetrical with respect to the reference plane.
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Equations of Motion for a Rigid Body
16 - 5
Consider a rigid body acted upon
by several external forces.
Assume that the body is made of
a large number of particles.
For the motion of the mass center
G of the body with respect to the
Newtonian frame Oxyz ,
F m a
For the motion of the body with
respect to the centroidal frame
Gx’y’z’ ,
G G
M H
System of external forces is
equipollent to the system
consisting of
and.
G
ma H
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Plane Motion of a Rigid Body: D’Alembert’s Principle
16 - 7
F ma F ma M I
x x y y G
Motion of a rigid body in plane motion is
completely defined by the resultant and moment
resultant about G of the external forces.
The external forces and the collective effective
forces of the slab particles are equipollent (reduce
to the same resultant and moment resultant) and
equivalent (have the same effect on the body).
The most general motion of a rigid body that is
symmetrical with respect to the reference plane
can be replaced by the sum of a translation and a
centroidal rotation.
d’Alembert’s Principle : The external forces
acting on a rigid body are equivalent to the
effective forces of the various particles forming
the body.
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Axioms of the Mechanics of Rigid Bodies
16 - 8
The forces act at different points on
a rigid body but but have the same
magnitude, direction, and line of action.
F F
and
The forces produce the same moment about
any point and are therefore, equipollent
external forces.
This proves the principle of transmissibility
whereas it was previously stated as an axiom.
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
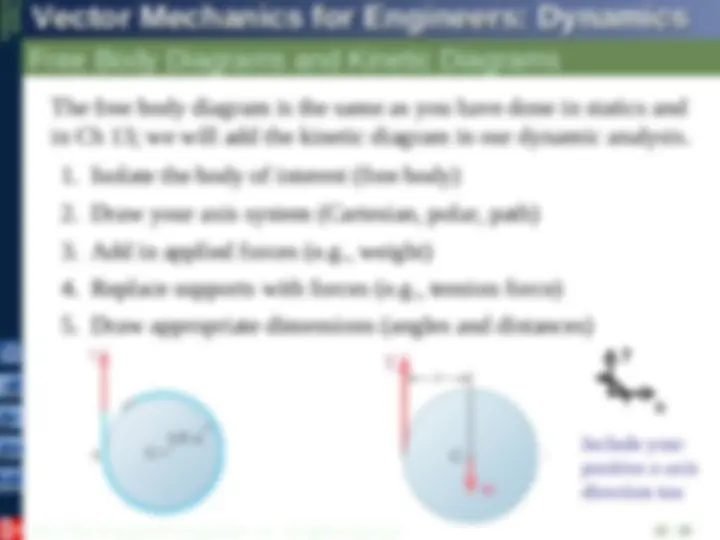
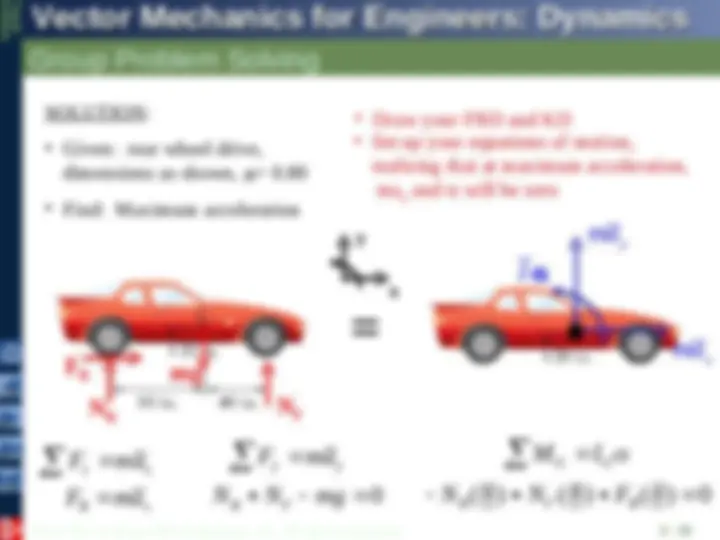
Free Body Diagrams and Kinetic Diagrams
12 - 10
The free body diagram is the same as you have done in statics and
in Ch 13; we will add the kinetic diagram in our dynamic analysis.
2. Draw your axis system (Cartesian, polar, path)
3. Add in applied forces (e.g., weight)
4. Replace supports with forces (e.g., tension force)
1. Isolate the body of interest (free body)
5. Draw appropriate dimensions (angles and distances)
x
y
Include your
positive z-axis
direction too
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Free Body Diagrams and Kinetic Diagrams
12 - 11
Put the inertial terms for the body of interest on the kinetic diagram.
2. Draw in the mass times acceleration of the particle; if unknown,
do this in the positive direction according to your chosen axes. For
rigid bodies, also include the rotational term, I
G
1. Isolate the body of interest (free body)
F m a
G
M I
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Free Body Diagrams and Kinetic Diagrams
2 - 13
P
L/
L/
r
A
C
x
C
y
mg
- Isolate body
- Axes
- Applied forces
- Replace supports with forces
- Dimensions
- Kinetic diagram
G
G
x
ma
y
ma
I
C
B
x
y
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Free Body Diagrams and Kinetic Diagrams
2 - 14
A drum of 4 inch radius is attached
to a disk of 8 inch radius. The
combined drum and disk had a
combined mass of 10 lbs. A cord is
attached as shown, and a force of
magnitude P=5 lbs is applied. The
coefficients of static and kinetic
friction between the wheel and
ground are
s
= 0.25 and
k
respectively. Draw the FBD and
KD for the wheel.
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Free Body Diagrams and Kinetic Diagrams
2 - 16
The ladder AB slides down
the wall as shown. The wall
and floor are both rough.
Draw the FBD and KD for
the ladder.
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
Free Body Diagrams and Kinetic Diagrams
2 - 17
F
A
W
N
A
F
B
N
B
x
ma
y
ma
I
- Isolate body
- Axes
- Applied forces
- Replace supports with forces
- Dimensions
- Kinetic diagram
=
x
y
0.225 m
0.225 m
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
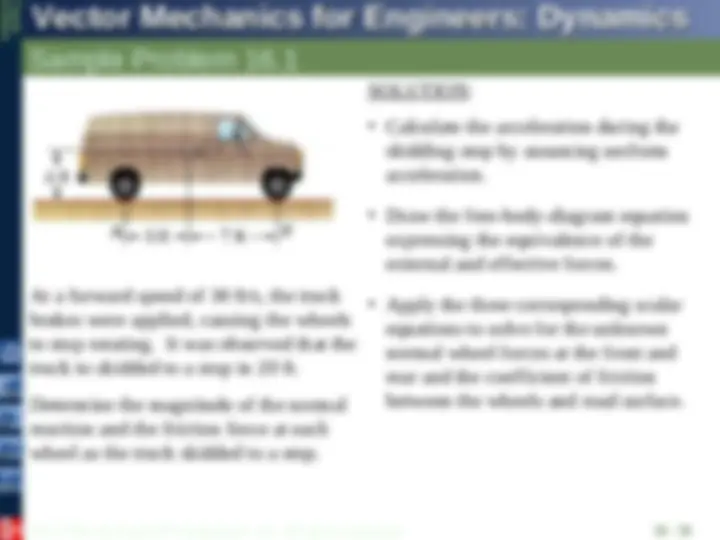
Sample Problem 16.
16 - 19
20 ft
s
ft
30
0
v x
SOLUTION:
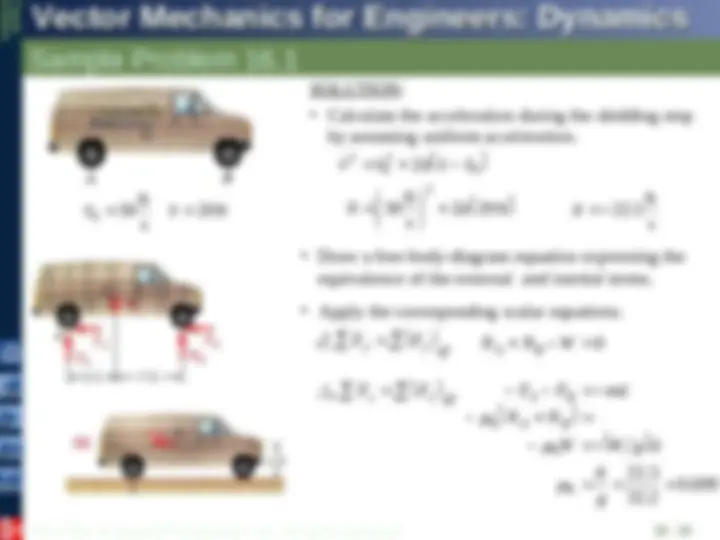
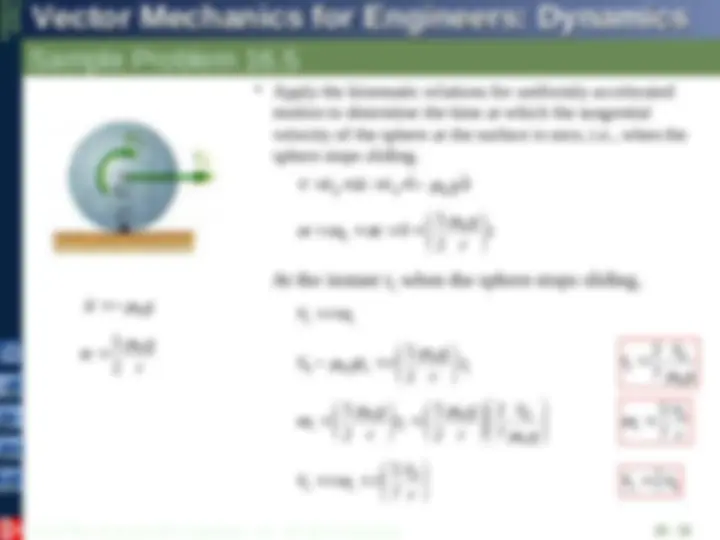
- Calculate the acceleration during the skidding stop
by assuming uniform acceleration.
2 20 ft
s
ft
0 30
2
2
0
2
0
2
a
v v a x x
s
ft
a 22. 5
- Draw a free-body-diagram equation expressing the
equivalence of the external and inertial terms.
- Apply the corresponding scalar equations.
N N W 0
A B
eff
y y
F F
699
2
5
g
a
W W g a
N N
F F m a
k
k
k A B
A B
eff
x x
F F
Vector Mechanics for Engineers: Dynamics
Vector Mechanics for Engineers: Dynamics
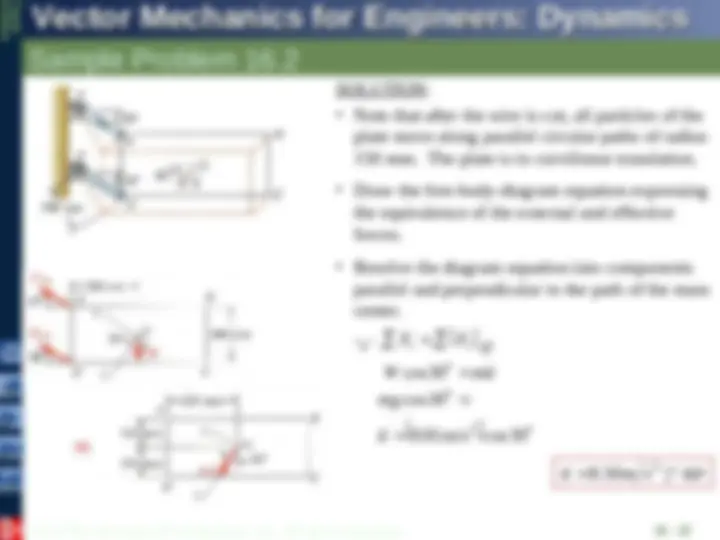
Sample Problem 16.
16 - 20
N W N W
A B
0. 350
N N W
rear A
- 350
2
1
2
1
N W
rear
0. 175
N N W
front V
- 650
2
1
2
1
N W
front
0. 325
F N W
rear k rear
0. 690 0. 175
F W
rear
0. 122
F N W
front k front
0. 690 0. 325
F W
front
0. 0. 227
- Apply the corresponding scalar equations.
N W
g
W a
a
g
W
N W
W N m a
B
B
B
- 650
5 4
12
5 4
12
1
5 ft 12 ft 4 ft
eff
A A
M M