Download dynamic lecture chapter 5 and more Lecture notes Mechanical Engineering in PDF only on Docsity!
VECTOR MECHANICS FOR ENGINEERS:
DYNAMICS DYNAMICS
TenthTenth
EditionEdition
Ferdinand P. BeerFerdinand P. Beer
E. Russell Johnston, Jr.E. Russell Johnston, Jr.
Phillip J. CornwellPhillip J. Cornwell
Lecture Notes:Lecture Notes:
Brian P. SelfBrian P. Self
California Polytechnic State UniversityCalifornia Polytechnic State University
CHAPTER
Kinematics of
Rigid Bodies
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Contents
15 - 2
Introduction
Translation
Rotation About a Fixed Axis: Velocity
Rotation About a Fixed Axis:
Acceleration
Rotation About a Fixed Axis:
Representative Slab
Equations Defining the Rotation of a
Rigid Body About a Fixed Axis
Sample Problem 5.
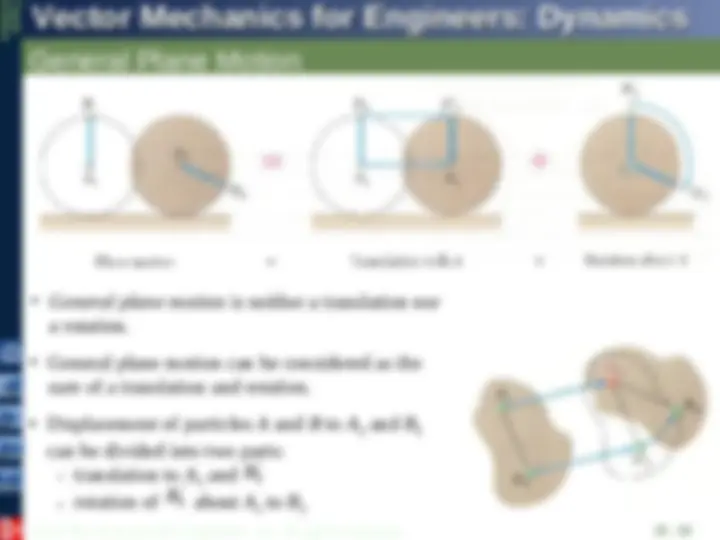
General Plane Motion
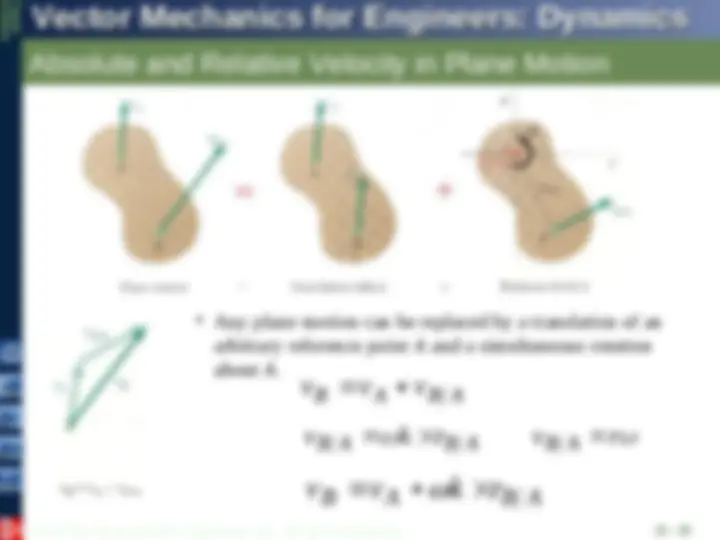
Absolute and Relative Velocity in Plane
Motion
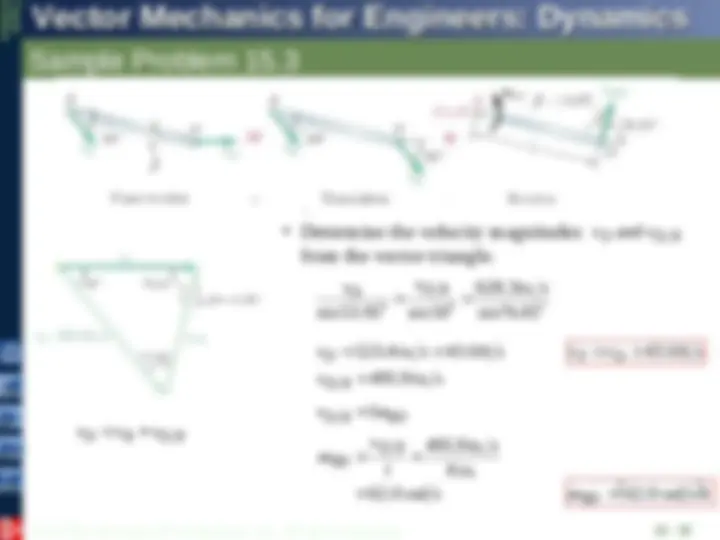
Sample Problem 15.
Sample Problem 15.
Instantaneous Center of Rotation in
Plane Motion
Sample Problem 15.
Sample Problem 15.
Absolute and Relative Acceleration in
Plane Motion
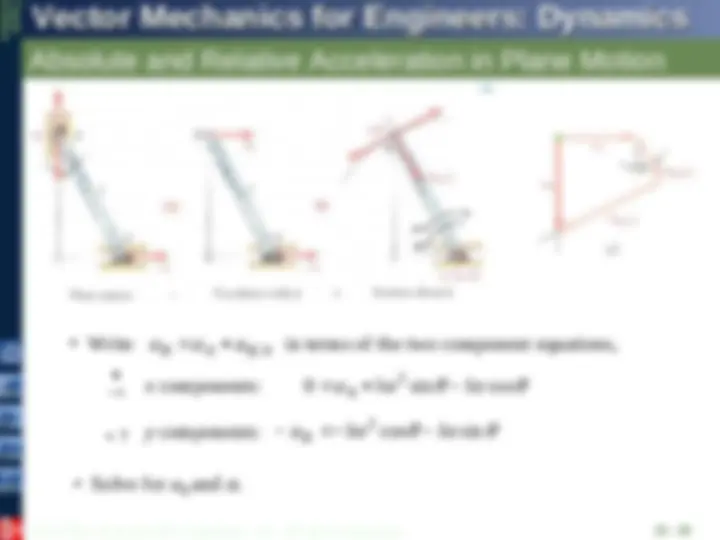
Analysis of Plane Motion in Terms of a
Parameter
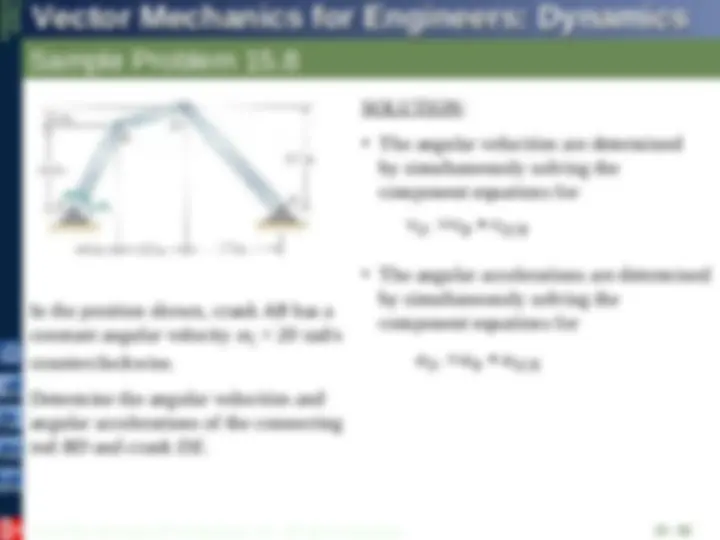
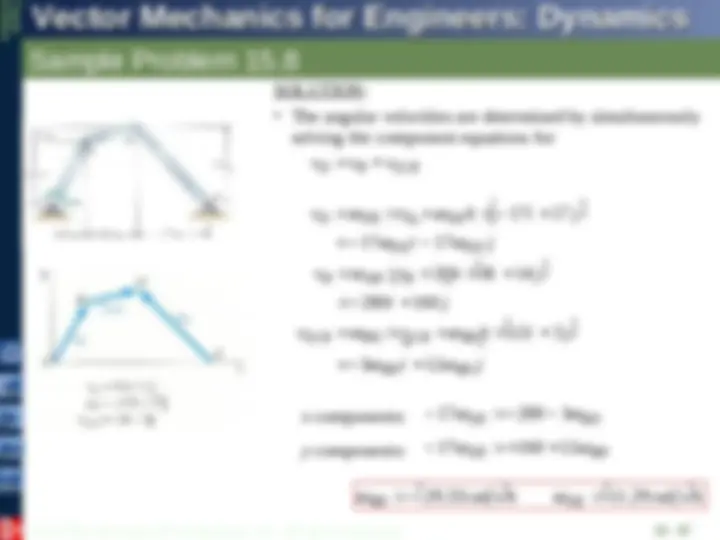
Sample Problem 15.
Sample Problem 15.
Sample Problem 15.
Rate of Change With Respect to a
Rotating Frame
Coriolis Acceleration
Sample Problem 15.
Sample Problem 15.
Motion About a Fixed Point
General Motion
Sample Problem 15.
Three Dimensional Motion. Coriolis
Acceleration
Frame of Reference in General Motion
Sample Problem 15.
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Applications
15 - 4
How can we determine the velocity of the tip of a turbine blade?
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Applications
2 - 5
Planetary gear systems are used to get high reduction ratios
with minimum weight and space. How can we design the
correct gear ratios?
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Introduction
15 - 7
- (^) Kinematics of rigid bodies: relations between
time and the positions, velocities, and
accelerations of the particles forming a rigid
body.
- (^) Classification of rigid body motions:
- (^) general motion
- (^) motion about a fixed point
- (^) general plane motion
- (^) rotation about a fixed axis
- (^) curvilinear translation
- (^) rectilinear translation
- (^) translation:
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Translation
15 - 8
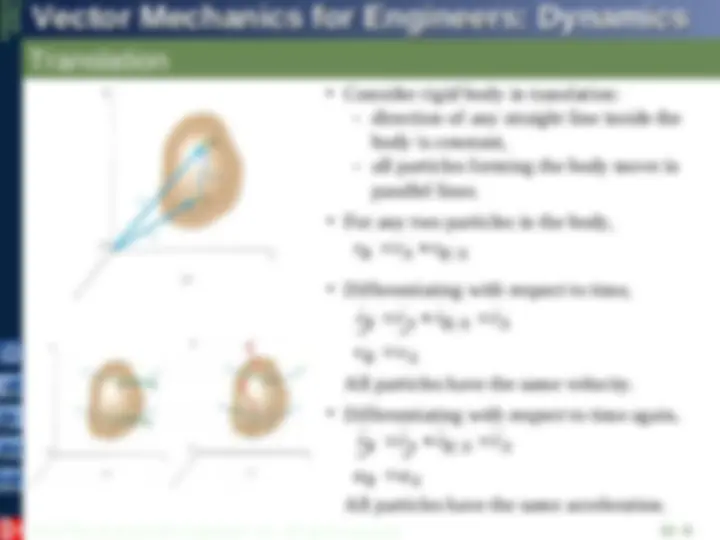
- (^) Consider rigid body in translation:
- (^) direction of any straight line inside the
body is constant,
- (^) all particles forming the body move in
parallel lines.
- (^) For any two particles in the body,
B A B A
r r r
- (^) Differentiating with respect to time,
B A
B A B A A
v v
r r r r
All particles have the same velocity.
B A
B A B A A
a a
r r r r
- (^) Differentiating with respect to time again,
All particles have the same acceleration.
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Concept Quiz
15 - 10
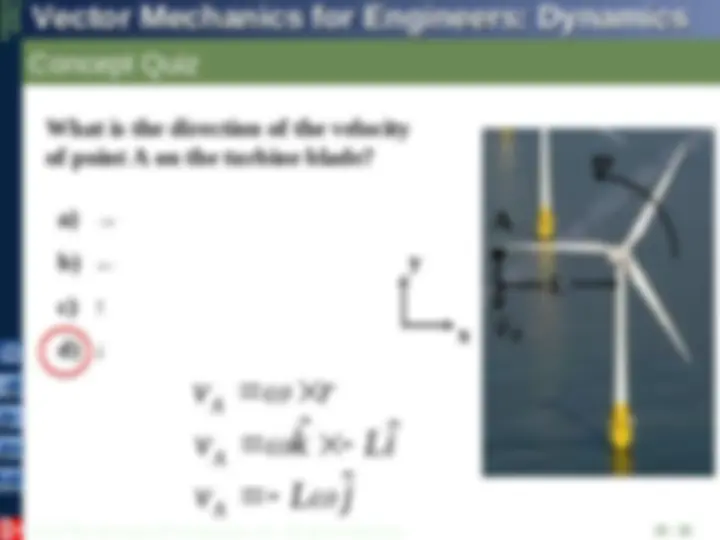
What is the direction of the velocity
of point A on the turbine blade?
A
a) →
b) ←
c) ↑
d) ↓
A
v r
x
y
ˆ (^) ˆ
A
v k Li
ˆ
A
v L j
L
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Rotation About a Fixed Axis. Acceleration
15 - 11
- (^) Differentiating to determine the acceleration,
r v
dt
d
dt
d r r
dt
d
r
dt
d
dt
d v a
�^
k k k
angular ac celeration
dt
d
radialacceleration component
tangentialacceleration component
r
r
a r r
- (^) Acceleration of P is combination of two
vectors,
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Concept Quiz
15 - 13
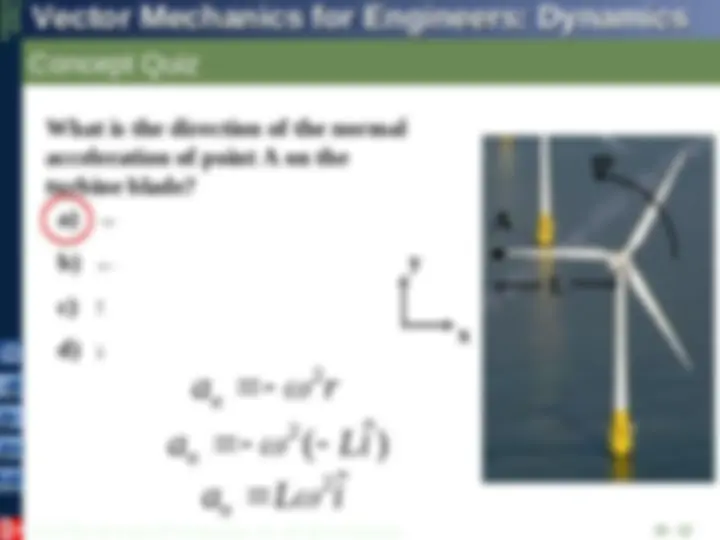
What is the direction of the normal
acceleration of point A on the
turbine blade?
A
a) →
b) ←
c) ↑
d) ↓
2
n
a r
x
y
2 ˆ ( ) n
a Li
2 ˆ
n
a L i
L
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Equations Defining the Rotation of a Rigid Body About a Fixed Axis
15 - 14
- (^) Motion of a rigid body rotating around a fixed axis
is often specified by the type of angular
acceleration.
d
d
dt
d
dt
d
d dt
dt
d
2
2
- (^) Recall or
- (^) Uniform Rotation, = 0:
t
0
- (^) Uniformly Accelerated Rotation, = constant:
0
2
0
2
2
2
1 0 0
0
t t
t
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
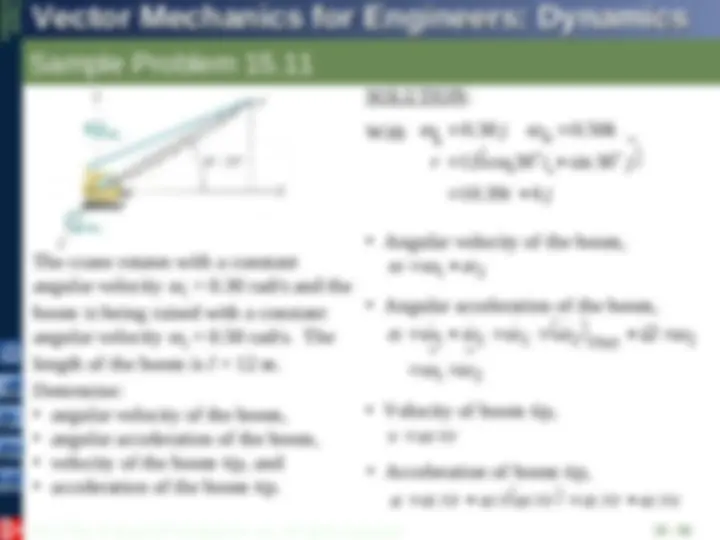
Sample Problem 5.
15 - 16
SOLUTION:
- (^) The tangential velocity and acceleration of D are equal to the
velocity and acceleration of C.
4 rad s
3
12
12 in. s
0 0
0 0
0 0
r
v
v r
v v
D
D
D C
2 3 rad s
3
9
9 in. s
r
a
a r
a a
D t
D t
D t C
- (^) Apply the relations for uniformly accelerated rotation to
determine velocity and angular position of pulley after 2 s.
4 rad s 3 rad s 2 s 10 rad s
2
0
t
14 rad
4 rad s 2 s 3 rad s 2 s
2 2
2
(^21)
2
1 0
t t
numberof revs
2 rad
1 rev 14 rad
N N ^2.^23 rev
5 in. 14 rad
5 in. 10 rad s
y r
v r
B
B
70 in.
50 in. s
B
B
y
v
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Sample Problem 5.
15 - 17
- (^) Evaluate the initial tangential and normal acceleration
components of D.
9 in.s D (^) t C
a a
2 2 2 0 3 in. 4 rad s 48 in s D (^) n D a r
2 2 9 in. s 48 in. s D (^) t D n a a
Magnitude and direction of the total acceleration,
2 2
2 2
9 48
D D t D n
a a a
2 48. 8 in. s D
a
9
48
tan
D t
D n
a
a
79. 4
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
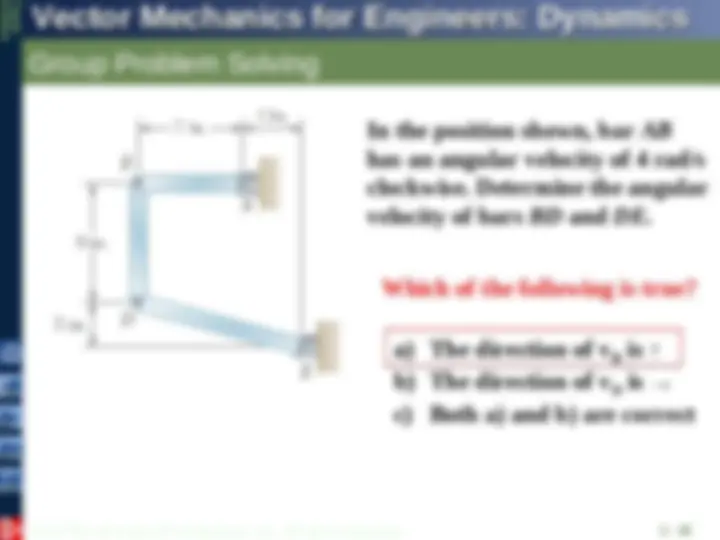
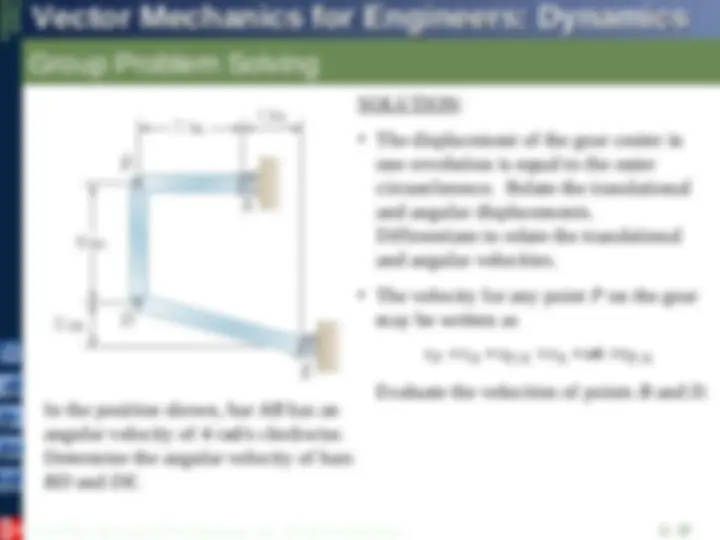
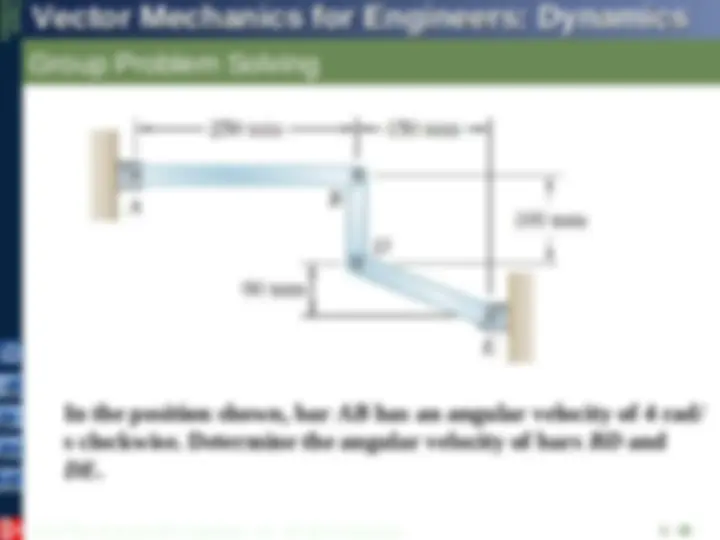
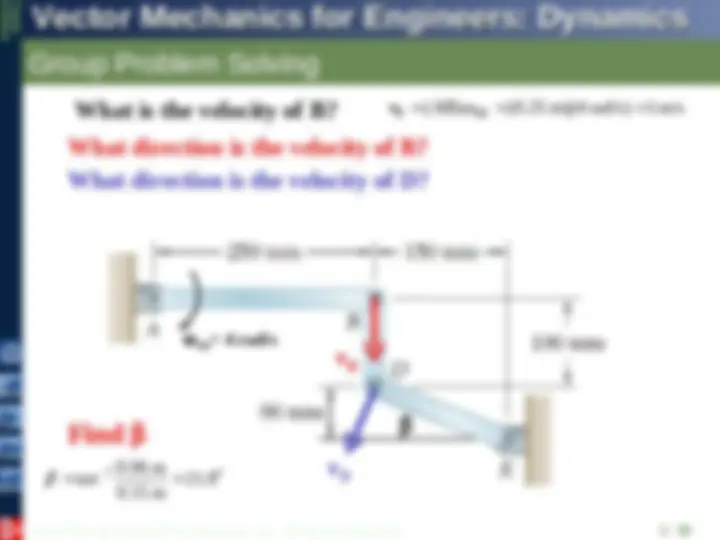
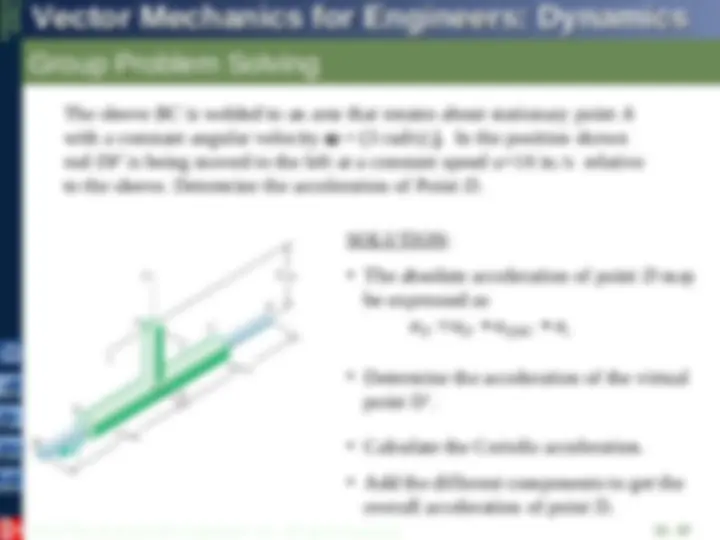
Group Problem Solving
15 - 19
A series of small machine components
being moved by a conveyor belt pass over
a 6-in.-radius idler pulley. At the instant
shown, the velocity of point A is 15 in./s to
the left and its acceleration is 9 in./s
2 to the
right. Determine ( a ) the angular velocity
and angular acceleration of the idler
pulley, ( b ) the total acceleration of the
machine
component at B.
SOLUTION:
- (^) Using the linear velocity and
accelerations, calculate the angular
velocity and acceleration.
- (^) Using the angular velocity,
determine the normal acceleration.
- (^) Determine the total acceleration
using the tangential and normal
acceleration components of B.
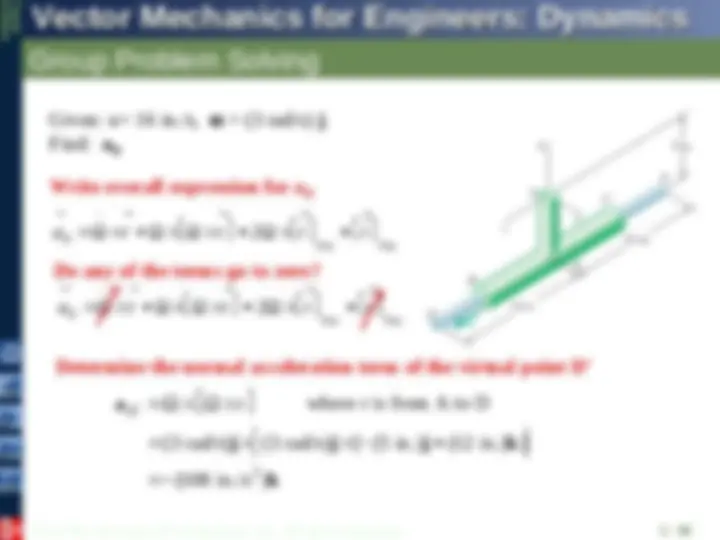
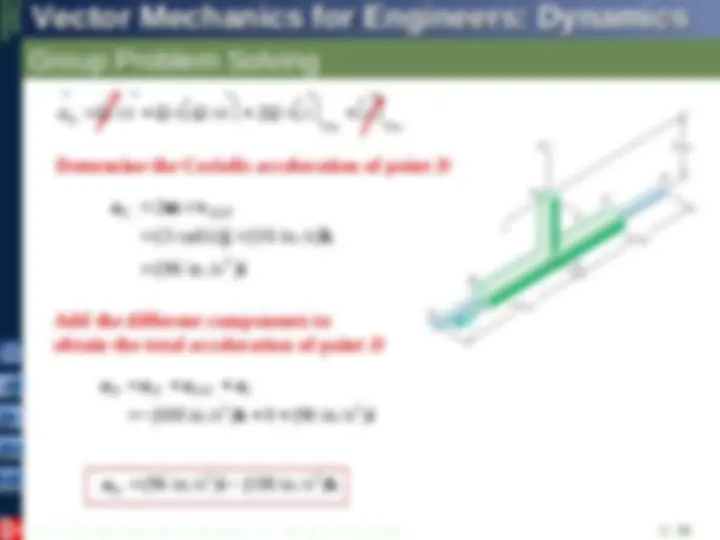
Vector Mechanics for Engineers: Dynamics Vector Mechanics for Engineers: Dynamics
Group Problem Solving
15 - 20
v= 15 in/s a t
= 9 in/s
2 Find the angular velocity of the idler
pulley using the linear velocity at B.
15 in./s (6 in.)
v r
2.50 rad/s
2 9 in./s (6 in.)
a r
2 1.500 rad/s
B
Find the angular velocity of the idler
pulley using the linear velocity at B.
Find the normal acceleration of point B****.
2
2 (6 in.)(2.5 rad/s)
n
a r
2 37.5 in./s n
a
What is the direction of
the normal acceleration
of point B****?
Downwards, towards
the center